|
$ o1 B8 H S6 V2 q

( T p# E) W+ S5 m5 H! h2 L
【编者按】基于多波束测深声纳工作原理,结合国内外主流浅水多波束测深声纳产品与技术发展现状,分析了浅水多波束测深声纳具备的5种典型能力,提出了从能力表征的角度理解浅水多波束测深声纳性能指标;总结了保障这些能力所采用的主要关键技术,讨论了技术实现的具体思路,列举了仿真或试验数据处理结果;展望了多波束测深声纳的发展趋势。本文发表在《海洋测绘》2016年第3期上,现编发给朋友们阅读了解。周天,1980出生,男,江苏盐城人,教授,博士,主要从事高频探测声纳基本理论、设备研制及应用等研究。
! u" G- q B0 E5 U$ }/ d# j 文/周天 欧阳永忠 李海森 , u/ r+ m6 r9 z+ }1 s9 h3 A5 q

* b+ X6 r! E+ G 一、引言
* C( X( [ v+ |- x2 b2 { 占地球总面积约71%的海洋已成为人类生存与实现可持续发展的重要空间。在围绕海洋的科学研究、资源开发、工程建设以及军事等活动中,通常需要准确地获取所关注区域内的海底地形地貌信息作为基础资料与支撑依据[1]。科学家和工程师们对海底地形地貌探测技术及设备做了大量的研究和开发。多波束测深声呐就是海洋勘测不可或缺的首选科学设备之一[2],被广泛应用于海洋工程测量、海底资源与环境调查以及海底目标勘测等国防和国民经济建设领域[3-7]。
G3 \- T; F0 p: @% ? 自从1956年在美国Woods Hole海洋研究所召开的一次学术会议上首次提出了多波束测深的构想以来,多波束测深声呐系统及相关技术的研究已经经历了半个多世纪的发展。目前国际上知名的多波束测深声呐产品主要包括:美国L-3 ELAC Nautik公司的SeaBeam系列,德国ATLAS公司的FANSWEEP系列,挪威Kongsberg公司的EM系列,丹麦Reson公司的SeaBat系列以及美国R2Sonic公司的Sonic系列等,已实现了浅水、中水、深水多波束测深声呐的系列化。 % {3 B6 o( f4 ?, k, S
在国内,多波束测深声呐的研究始于上个世纪80年代中期,但直到1998年才由哈尔滨工程大学和天津海军海洋测绘研究所等单位联合研制成功我国首台中水多波束条带测深仪[8],并获得部级科技进步一等奖;进入21世纪以来,中科院声学研究所、中船重工第715研究所、国家海洋局第二海洋研究所与浙江大学等多家单位联合开展了我国第一套深水多波束测深声呐系统研究[9];鉴于中水、深水多波束测深声呐较高的研制和使用门槛,结合国内对浅水多波束测深声呐的迫切需求,近10年来国内以哈尔滨工程大学为代表的多家专业团队在浅水多波束测深声呐国产化上投入了大量人力物力资源,并取得了丰富研究成果,总体技术水平已经接近国际领先水平,为打破国外技术垄断、塑造自主品牌并逐步替代国外浅水多波束测深声呐产品,作出了巨大努力[10-16]。
1 r4 _9 B: `; x 本文结合对国内外多波束测深理论与产品发展状态的跟踪,以及团队多年来在浅水多波束测深声呐相关技术研究工作方面的体会,特别围绕浅水多波束测深声呐的技术指标如何理解、涉及的关键技术、多波束测深声呐发展趋势等几个方面展开阐述。 0 ]2 F$ o4 X5 w4 m. a# D, H* S
二、多波束测深原理与解析 , m) Y! t, t0 o" L e$ H7 o+ l4 \
多波束测深声呐的工作原理是利用发射换能器基阵向海底发射宽覆盖扇区的声波,并由接收换能器基阵对海底回波进行窄波束接收[10]。通过发射、接收波束相交在海底与船行方向垂直的条带区域形成数以百计的照射脚印,利用信号处理方法对这些脚印内的反向散射信号进行到达时间t和到达角度θ(反向散射信号和水平面法线方向的夹角)的估计,结合声速仪测得的声速数据,由公式Hθ=1/2ct·cosθ计算得到水深值。
! U3 g0 a$ e7 h) T5 | 多波束测深声呐的原理看起来并不复杂,但是市场上各厂商产品的特点、性能却有较大差异,这一方面体现了多波束测深声呐存在关键技术,另一方面也给用户的选择有时会带来困惑。本文首先从声呐研制的角度,解析一下浅水多波束测深声呐技术指标和用户需求之间的对应关系。总体来说,技术指标主要反映了该声呐是否具备以下5个能力。
5 k- ?4 m- a4 d5 J8 z ⒈ 测得是否宽 9 d/ q' V- O$ z
该能力主要通过技术指标中的“覆盖扇面”项体现,该指标可用几倍水深覆盖表示,例如EM3002D最大可达到10倍水深覆盖,但由于实际使用中能够达到几倍水深覆盖的性能往往还和水下地形、声速剖面等非声呐因素有关,因此该指标也常用条带扇面值来表示,例如EM2040单探头覆盖扇面为140°。该指标直接体现了声呐的测绘效率。从声呐研制角度来看,其主要决定于外侧(小掠射角)回波信号的信噪比和信号处理方法。 ) _2 l( t0 ]2 S. ?/ ~/ d# F9 r
⒉ 测得是否远 1 A+ }# @" v, j9 Q( L
该能力主要通过技术指标中的“最大深度”项体现,例如EM2040基阵配置在1.5°×1.5°(200kHz)时,在冷海水工作环境中能够达到470m。该指标直接体现了声呐对作业区域的测绘能力。从声呐研制角度来看,在基阵技术参数相同的前提下,决定于所采用探测信号的形式。采用FM等复杂探测信号(例如SeaBat7125等),有利于达到更大的水深,同样有利于更宽的覆盖。 1 b: Q M- r+ A( z: P
⒊ 能否测得近
+ K* k4 R% B2 T, \% e6 q( j 该能力主要通过技术指标中的“最小深度”项体现,例如EM3000的最小测量水深是换能器下方1m,现在的浅水多波束测深声呐由于一般都采用了接收动态聚焦波束形成技术,此项指标一般不再特意强调。该指标直接体现了声呐在甚浅水作业区域的测绘能力。从声呐研制角度来看,“测得浅”和“测得深”各有各的难点,聚焦波束形成技术相比于非聚焦波束形成技术,运算量大大增加。 ( e, J6 w6 j& J; l
⒋ 瞄得是否准
; q, j- k2 F$ u! _% t 该能力主要通过技术指标中是否具备艏向、纵摇和横摇补偿功能体现。该指标直接决定了波束照射点位置,保障了测量的有效性。从声呐研制角度来看,需要对发射阵、接收阵进行灵活的相控处理。
- r& u- Y0 Z) H$ y2 {3 M) ^8 t ⒌ 测得是否精
3 X( C* O! M. m; q! {0 Q: a3 p; l 该能力主要通过技术指标中的“距离分辨率”、“ping率”、“波束数目”体现,分别对应了声呐在距离方向、航行方向和水平方向的描述能力。该指标直接决定了测量的精细程度。从声呐研制角度来看,距离分辨率对应(降)采样频率,距离分辨率越高则要求硬件平台处理能力越强;越高的ping率、越大的波束数目同样也对硬件平台处理能力要求越高。 ! p* y6 ^; o) ]4 }9 P! n9 P9 I
一般来说,多波束测深声呐的技术指标说明书主要由上述5个问题的答案组成,用户据此可以很容易地对多个产品进行性能的比较分析。在有条件的情况下选择技术指标高的产品自然是无可厚非,但选择满足自己实际需求的高性价比产品更具专业性;同时,用户还应该考虑产品的现场技术支持能力和较为低廉价格的快速零备件更换保证等多种因素。 / \( G+ x @7 P
三、多波束测深声呐关键技术 4 t( t( [6 B0 }2 T/ e k. W/ ^
本节主要是从声呐研制的角度,分析多波束测深声呐中用以有效保障上面的“测得宽”、“测得深”、“测得浅”、“对得准”、“测得精”五个重要能力的主要关键技术。
% b( f% M$ ?$ \- g) f, Q ⒈ 超宽覆盖技术
$ `6 L( f, ?" Y( W6 A6 l, Q 限制多波束声呐覆盖性能的主要因素是外侧海底回波信噪比降低以及由于波束变宽导致的回波波形展宽。在垂直于海底方向附近区域内的波束输出,能量强且持续时间短;对于外侧区域,回波弱并且展宽严重。 + E/ S6 P$ G% Y: ]6 `, k6 u
对于外侧信噪比低的问题,可以通过阵型设计,提高发射基阵在外侧的发射响应、或者接收基阵在外侧的接收灵敏度来缓解[16-18]。图1中给出了AtlasFansweep Coastal多波束测深声呐基阵结构,可见其对发射和接收阵形同时采用了外侧优化设计,充分保障了其超宽覆盖性能。 8 [- D# x3 t' |: ]; @1 I, G
 图1 Atlas Fansweep Coastal基阵内外形状实物图 图1 Atlas Fansweep Coastal基阵内外形状实物图
4 O, o6 O/ Q: b: ~, L
对于外侧区域波束展宽导致测深精度降低的问题,从基阵设计角度,可以增大基阵的尺寸,达到减小波束宽度的目的,目前国际上主流的浅水多波束测深声呐波束宽度都已经从上一代的1.5°×1.5°减小至1°×1°,甚至0.5°×0.5°;从信号处理角度,目前国内外文献中可见有三类解决途径:第一类是不采用常规波束形成算法,而采用子空间类波束形成算法,如MUSIC算法、MSB-RMU算法、MSB-CAATI算法、ESPRIT算法、MVDR算法等[17,19-22];第二类是基于相干原理的多波束测深,如多子阵相位差测向、基于全孔径波束相位测向等[23-25];第三类是基于常规波束形成输出进行拟合的算法,典型的如BDI算法等[26]。 / K2 P6 P% Q: y
⒉ 复杂信号技术
+ A( |# ]4 F* w+ Y 浅水多波束测深声呐为了提高距离分辨力(用以保障微地形或小目标探测性能),通常都采用窄CW脉冲作为探测信号,如Sonic 2024的发射脉冲宽度最小可达10μs,EM2040的发射脉冲宽度最小可达25μs(注:越窄的CW脉冲要求带宽性能越好的换能器)。在发射基阵最大发射功率确定的情况下,窄脉冲的能量受到了限制;而如果采用长CW脉冲作为探测信号,虽然提高了发射能量,达到增加探测距离和扇面的目的,但是却损失了距离分辨力,因此必须采用复杂信号,如FM信号、编码脉冲信号等。例如EM2040采用12ms长的FM信号作为探测信号。
# K6 G; v9 O* z5 B* ^8 _ 采用复杂信号技术能够为主动声呐带来性能上的提升,但是也提高了工程实现的复杂度,例如发射机设计难度变大、信号处理运算量增加等。
6 d) J! Y2 @! i- u ⒊ 动态聚焦技术 ) B; y) S) E% b
对于浅水多波束测深声呐而言,其浅水测量环境下的表现甚至比深水时还重要。通过增大发射功率、采用复杂信号技术等途径可以有效提高声呐的作用距离和扇面,但改善声呐在小水深条件下的测深性能却需要通过近场聚焦技术来保证。当声呐和探测目标间的距离较近时,须采用基于球面波声场模型的波束形成算法,否则会导致波束角展宽(发射波束和接收波束都存在此问题)。 $ R0 D$ \; c" R* U& I. ~
图2给出了水池实验过程中,目标距离基阵距离从0.4m~5.6m范围内变化时,常规波束形成算法和聚焦波束形成算法性能的对比。由图中可见,在距离较近时,由于常规波束形成算法导致波束展宽,目标图像模糊,随着距离逐渐增加,其性能逐渐接近聚焦波束形成算法[13]。
, y# Z4 _; J9 Q% l6 {& j 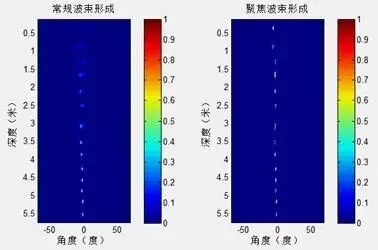
- d7 q, T0 o4 g$ h# {4 m 图2 两种波束形成算法对近距离目标探测性能分析示意图
( H8 }. W2 S# {+ K" \" f; a 尽管近场动态聚焦波束形成算法的基本原理比较简单[27],但其运算复杂,实时实现难度大,有时不得不进行折中考虑,直到近年来随着微处理器技术的发展,其实时实现才在国内外浅水多波束测深声呐中成为常态。 : c; u0 H: R( n, k a5 U
类似于接收动态聚焦技术,探测声波发射同样存在此问题,因此发射动态聚焦技术也有利于提升浅水时的性能,通过计算机仿真阐述见图3。 9 [: v# x5 U* P- x" k
图3中,左图仿真给出了水深2米、水平距离-10米到10米、船行方向角度从-10°到10°范围内的信号强度分布。可以看出斜距较远时,航行方向发射波束波束宽度较窄,而当斜距逐渐变小,航行方向波束宽度增大,也导致发射能量在海底分布的发散;图3中的右图仿真给出了将发射焦点聚焦在2米时的回波信号强度分布,有效改善了航行方向的发射波束宽度。 - f6 O. ]) _7 ?; R8 U- F2 Z
 图3 聚焦前后的目标回波强度示意图 图3 聚焦前后的目标回波强度示意图
/ }- m$ }' _7 I4 z& |* `
具有发射聚焦能力的浅水多波束测深声呐不多见(EM2040是其中之一),哈尔滨工程大学还进一步研究了多焦点发射聚焦技术,将发射聚焦在多个焦点时,在水平距离覆盖范围内,航行方向上的发射波束宽度都得到了改善[13]。
2 \% \9 d2 {+ D- V! p ⒋ 波束控制技术 " B- a3 f( h0 Q3 X& m
波束控制的对象包括发射波束和接收波束,其目的是保证预期的测绘带不随着载体的姿态(横摇、纵摇、艏向)的实时改变而改变。波束控制主要包括横摇实时补偿、纵摇实时补偿和艏向实时补偿[28]。 ! r# i* W: D- l1 B
⑴横摇实时补偿
* o ]# A7 k% w( W& i# Z5 ] 随着载体的“左摇右摆”,测绘条带参差不齐,测绘条带的有效宽度变窄,降低了测绘效率;而右图给出了经过横摇实时补偿处理、不受载体横摇影响的测绘条带分布,明显提高了测绘效率。在具体工程实现时,要求声呐接收波束形成算法需要参照姿态传感器输出的横摇值实时更新其波束形成角度。
; ^+ R, Y( R. ?: O, i ⑵纵摇实时补偿 ' k j8 Y/ j! A8 b! @
未经纵摇补偿时,测绘条带会随着载体的“前俯后仰”,在航行方向上呈“深一脚、浅一脚”的不均匀分布;而经过纵摇补偿后,测绘条带在航行方向上的分布比较均匀。在具体工程实现时,要求声呐发射基阵每个通道的驱动信号可参照姿态传感器输出的纵摇值实时进行控制,改变发射波束指向。 & \5 j( t. H! I( K" i8 w
⑶艏向实时补偿
* V% s6 M* P8 Y/ t4 ] 随着载体的偏航,测绘条带也随之偏转;右图是经过艏向补偿的测绘条带,其和预期的测绘条带偏离不大。艏向补偿方法和纵摇补偿方法类似,并且在实际中,常常综合二者一起考虑。对于艏向补偿,除了要求声呐发射基阵每个通道的驱动信号独立可控外,还要求宽的发射扇面必须由多个窄的发射扇面组成,这些窄的发射扇面工作频率各不相同[29]。 ~& G+ S% n/ t
⒌ 精细测量技术
& s: x5 d0 w: `# ]. P j5 r' ]- t “精细”可以从采样频率(距离方向精细程度)、波束数目(水平方向精细程度)和ping率(航行方向精细程度)三个方面来衡量。 2 _# k- n! r: G- M
⑴距离方向精细测量 6 K9 P& T" n2 E. W/ p6 i
主要依赖于系统采样频率的高低。越高的采样频率意味着数字序列相邻样本代表的时间间隔越短,从而能够对回波到达时间进行越精细的描述,在工程实现中同时也意味着需要硬件平台具有更强的处理能力、更高的数据传输带宽、更大的数据存储容量。 7 M" N: {5 `) O- J' @/ Z# n# w
⑵水平方向精细测量 5 S, d# o* k2 ?, e
主要依赖于接收波束数目的多少。随着微处理器技术的发展,浅水多波束测深声呐接收波束数已经从上一代的100多个增加到500个左右,甚至更多。高密度的测深点保障了对海底测绘条带采样的精细程度。在工程实现中需要强大的信号处理平台保障算法得到实时实现。 2 d) f% b0 l# s% @ s8 u3 E
⑶航行方向精细测量 ' a7 S- G9 |9 n* W
主要依赖于测绘ping率的高低。ping率越高则测绘条带沿航行方向分布越密。提高ping率的关键之一也是要有强大的信号处理平台保障能够迅速处理完当前ping的回波数据并得到测点深度值;另一个关键是采用频分或码分等复用技术,突破单频点工作的ping率极限(受限于水深、覆盖扇面和声速之间的确定关系)。
0 E. n/ ^/ \0 J 四、多波束测深声呐最新发展 $ C" K4 f: N" u% x7 |; Y
经过上面几点关键技术的分析可见,多波束测深声呐利用窄脉冲或宽带信号可以得到斜距的高分辨估计,利用基于子空间或相位差等测向技术可以得到回波到达角度的高分辨估计,从而得到测深点深度和水平位置的高分辨估计。但是,在航行方向上,多波束测深声呐的分辨能力受限于发射孔径的尺寸,随着水深的增大,航向脚印增大,导致航向分辨性能下降,影响了多波束测深声呐的探测性能。
! }3 g' L; x2 N3 j0 o- F 受启发于合成孔径声呐[30]和干涉合成孔径声呐[31]的技术原理与优势,国内外近年来开展了结合多波束测深声呐和合成孔径声呐优势的多波束合成孔径声呐研究,其出发点是将多波束测深声呐的接收线阵随着载体的直线运动拓展成二维面阵,从而提高航向的分辨性能,不仅实现了多波束测深声呐自身能力的提升,也弥补了(干涉)合成孔径声呐垂底存在隙区的缺陷[32]。 ; u' x: n2 ^& b1 d
图4是哈尔滨工程大学在水池开展多波束合成孔径声呐原理验证试验的结果,(a)图是多波束测深声呐某号波束的水下小目标回波声学图像,(b)图为多波束测深声呐接收到的回波数据经过航行方向的孔径合成处理得到的同号波束的回波声学图像,可见航行方向的分辨性能得到了明显提高。 2 U+ R. i7 d6 U- B& H0 x! [" X

; q& o$ }" y1 P5 {/ F6 n
(a)单线阵波速形成 (b)航迹向孔径合成 1 X8 F1 I3 h! Z& I
图4 多波束合成孔径声呐原理验证水池试验结果示意图 4 Q! Z* A" p' c9 i. d3 L
2015年,Kongsberg公司比较了它们的浅水多波束测深声呐EM2040C和合成孔径声呐HISAS2040的性能,见图5和图6。可见,HISAS2040分辨性能优势明显,充分展示了在航行方向上进行孔径合成处理的优越性,其代表了多波束测深声呐的一个发展方向[33]。
+ N( j9 t; ]6 g E0 i7 z% k 
' l* R. Y# C3 t5 f 图5 EM2040C获得的水下地形图 ]4 e3 K+ j: `

+ I5 s4 t+ T5 k( z' T
图6 HISAS2040(合成孔径)获得的水下地形图 9 r9 J2 f+ c3 J, I) f8 h
五、结束语 , H( w* L$ y8 E! n, T, n1 `4 m- N6 X5 X
⑴纵观国内外主流浅水多波束测深声呐关键技术,虽已取得长足进步,但仍继续采用或者开发新技术,例如宽带换能器技术、复杂探测信号、发射动态聚焦、艏向补偿、合成孔径声呐技术等,反映了人们对浅水多波束测深声呐高性能指标的追求是无止境的,这归根到底也是客观上对海底精细探测的需求不断提高决定的。 3 [5 z: x3 y( f
⑵文中关于关键技术的讨论基本涵盖了当前国内外主流的浅水多波束测深声呐产品。这些关键技术是保障所研制声呐具备高性能技术指标的不可或缺的理论和工程基础,有些国内外产品虽然具备和国际一流产品“形似”的外观,但实际性能差异很大。不管是国外知名厂家还是刚入行的国内新军,要想达到“形神具备”,掌握先进、稳健的测深算法是根本保证,尤其是一些特殊地形需要特别的测深算法,例如多次检测[34]、管线检测[35]、突发异常地形跟踪等,这往往不能一蹴而就,而是需要长期的摸索与不断积累和完善。 0 d' \7 @7 W3 _$ b% W6 N
⑶多波束测深声呐的首要用途是海底地形探测,虽然它也可以用于海底地貌成像、海底底质分类等其它多种应用场合,但地形测量是核心基础,没有高质量的地形,后续的二次开发与应用都是缺乏说服力的。
- W3 v0 A" T/ z% Y 总之,近年来,随着国内多方研发力量的投入,浅水多波束测深声呐关键技术已经基本被突破,国内已经问世了多款实用化的浅水多波束测深声呐产品,但在进一步逼近或引领国际先进技术产品的道路上依然面临挑战。在此也建议国内相关单位能够联合起来为国产海洋仪器的“产学研用”营造良好氛围,合力打造我国新一代可靠实用的浅水多波束测深声呐。
: {$ x9 {- ?# h" L; x3 ^ ■致谢:本文是团队长期技术积累的结晶,也是国内同行共同努力的成果,更是海军领导机关、科技部、国家自然科学基金委员会长期支持和鼓励的结果,在此表示感谢! 2 b3 D8 }1 M2 n8 u. Y- y

% ~/ K& A' o7 c2 x u+ M" I
参考文献 + x) Z9 k; g8 n/ A: {2 V
[1]李海森,周天,徐超.多波束测深声呐技术研究新进展[J].声学技术,2013,32(2):73-80. 9 B( Z4 F/ c" e& h- P
[2]杨鲲,吴永亭,赵铁虎,等.海洋调查技术及应用[M].武汉:武汉大学出版社,2009.40-48.
2 F9 {& j Y9 m# M8 E [3]丁继胜,董立峰,唐秋华,等.高分辨率多波束声呐系统海底目标物检测技术[J].海洋测绘,2014,34(05):62-64. : X2 E1 k: [- p9 o6 g$ a
[4]王利锋,蒋新华,王冰,等.多波束测深系统在航道测量中的关键问题探讨[J].海洋测绘,2014,34(05):55-58.
7 S8 Y( t3 E& h' Y9 { [5]李志刚,陈祥余,李海森,等.海底地基形位测量仪研制与海上试验研究[J].海洋工程,2014(2):125-132. / b p+ z @! t" g0 m
[6]陈义兰,刘乐军,刘晓瑜,等.深海油气勘探中的海底地形勘测技术[J].海洋测绘,2015,35(02):18-22. ) n2 ~9 R6 h8 M+ l8 `1 n/ J
[7]张永明,石晓伟,毕建强,等.声波探测技术在海底输油管道检测中的应用[J].海洋测绘,2014,34(01): 65-67.
2 T+ ?$ M9 P; O, A5 m) m [8]李海森.多波束条带海底地形测绘系统研究[D].哈尔滨工程大学,1999. + I) q5 x8 }# C/ \8 t
[9]苏程.深水多波束测深侧扫声呐显控系统研究[D].杭州:浙江大学,2012.
+ s& A, Y" b- p7 A2 F0 { [10]周天.超宽覆盖海底地形地貌高分辨探测技术研究[D].哈尔滨:哈尔滨工程大学,2005. 6 u! x' x' \8 E* G, F! L' Q/ ~' L
[11]陈宝伟.超宽覆盖多波束测深技术研究与实现[D].哈尔滨:哈尔滨工程大学,2012. - D7 x% T4 g1 Q, l
[12]魏玉阔.多波束测深假象消除与动态空间归位技术[D].哈尔滨:哈尔滨工程大学,2011. : Z' C: i! L L- ~+ S; K
[13]鲁东.浅水多波束测深声呐若干关键技术研究[D].哈尔滨:哈尔滨工程大学,2014.
% {- j* s4 a [2 i: W1 S0 H( ~' A [14]海鹰加科海洋技术有限责任公司.HY1621多波束测深仪的研制及进展[C].北京:中国海洋学会2015年学术会议. ' ]7 V( Z) G/ F6 Z3 G8 i7 V$ v: R
[15]http://www.zhdgps.com/productInfo.aspx?id=257. , H+ y+ X' B1 h6 i& b
[16]胡青,郑震宇,裘洪儿.一种浅水多波束声呐U型发射阵实现方法[P].中国:CN102176007A,2011.
, R$ x* |# H, ^( c/ m* P* n [17]STEFAN K.The new Atlas Fansweep 30 Coastal:atool for efficient and reliable hydrographic survey[C]//Germany:OMAE2006(0-7918-4746-2),2006,1-5.
* F' W& D; e" B0 c: A [18]周天,李海森,么彬,等.具有超宽覆盖指向性的多线阵组合声基阵[P].中国:ZL101149434A. ( }" d( S/ ~! J# e6 S: z* ~
[19]李海森,黎子盛,周天,等.MSB.CAATI算法在多波束测深系统中的应用[J].声学技术,2007,26(2):286-290. . `$ v) }" a/ m7 H7 T6 S3 K
[20]周天,李海森,么彬,等.高分辨多波束海底地形探测的MSB-RMU算法研究[J].电子与信息学报,2010,32(7):1644-1648. $ J6 O5 a, ?3 u$ h
[21]Are Rønhovde, High Resolution Beamformingof SIMRAD EM3000 Bathymetric Multibeam Sonar Data[D],October,1999
& D' v7 n0 |4 T7 [ [22]魏玉阔,陈宝伟,李海森.利用MVDR算法削弱多波束测深声呐的隧道效应[J].海洋测绘,2011,31(1):28-31.
: n5 ]' x' f; d( I [23]Luren Yang and Torfinn Taxt,MultibeamSonar Bottom Detection Using Multiple Subarrays[C]//Proc.OCEANS'97.Halifax.1997.932-938. * B: c9 N: ? W6 u T
[24]张毅乐,李海森,么彬,等.基于相干原理的多波束测深新算法[J].海洋测绘,2010,30(6):8-11.
$ C. G7 ]& g/ I6 I0 a. p( _ [25]周天,陈宝伟,李海森,等.基于全孔径波束相位的方位估计新算法[J].仪器仪表学报,2010,31(10):2267-2271.
# E0 R4 |5 o- J7 B1 r2 i [26]Douglas Luiz daSilva Pereira. Improving Shallow-Water Multibeam Target Detectionat Low Grazing Angles[D].The University of New Brunswick,2015. * Y3 w% `+ G! ~# S, ]# E3 Y7 D
[27]V.Murino,A.Trucco.Underwater3D imaging by FFT dynamic focusing beamforming[C]//Image Processing,ICIP-94,TX,1994(1):890-894. ( ]. ]4 o( X5 ~% R
[28]John E. Hughes Clarke. Multibeam ActiveMotion Compensation[R],OMG/UNB.
+ h$ u7 n6 P0 P! N! g [29]Yun-ta Teng. Sector-specific Beam PatternCompensation for Multi-sector and Multi-swath Multibeam Sonars[D].THEUNIVERSITY OF NEW BRUNSWICK,2011. # f# ?' T. z* C" S
[30]Shadows high performance mapping sonar[R].IXSEA.2013. 5 E( ` B, ]/ ~' L% Y3 O! T6 Z: ^
[31]T.O.Sæbø,B.Langli.Comparison of EM 3000multibeam echo sounder and HISAS 1030 interferometric synthetic aperture sonarfor seafloor mapping[C]//InProceedings of ECUA,2010:451-461. * D4 P: L6 x9 A; Z$ U
[32]HISAS (High resolution interferometricsynthetic aperture sonar)1030[R].KONGSBERG. ' Z5 k" c+ `( @ m6 X3 b2 a
[33]http://www.shallowsurvey2015.org/SS2015_Session01_Kongsberg. ; d/ f; n6 [8 J: l' l$ V0 s% m; R
[34]http://www.shallowsurvey2015.org/SS2015_Session09_Talk4_Reson. % E1 x* ?, U( p2 f; }$ g; t8 o
[35]http://www.teledyne-reson.com/news/pipeline-surveying-from-a-surface-vessel-in-the-caspian-sea.
/ K# {7 ?6 V( x" U0 u. |  fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
" _) k4 `& L z( w% j8 Q
■论文专区的文章均为在《海洋测绘》上刊发的论文,若其他公众平台转载,请备注论文作者,并说明文章来源,版权归《海洋测绘》所有。
8 E4 B7 _1 x; K4 w 相关阅读推荐:
3 z2 ?( V, ?5 k. s7 N2 H: D9 M 测绘讲座▏我国多波束测深技术研究最新进展 7 T7 Z$ y1 ?7 f
技术交流▏国产多波束测深仪的产业化进程与思考 ( g& Z4 z) T7 x& I% y6 m$ B+ ^0 F
海洋论坛▏国产地形地貌探测声纳的研究现状及思考 5 x1 e4 Q# y% N7 n8 ?! B
论文专区▏多波束水体影像的归位算法研究与实现 7 E( a `- D, Y7 P3 V
论文专区▏多波束无验潮水深测量中垂直基准模型构建
. Q+ _; V5 M2 R" u( Q5 e3 z. o% {% g
% x. B% b4 M: T7 s, Q6 b- T# E2 g* y' ^% n* N
8 s% K& J H( l5 ~# I+ L9 S- V
+ t/ a4 C: u$ Q: _9 U1 s! Z- E" `/ e5 o# x) Y
| 

