 点击上方“溪流之海洋人生”即可订阅哦 点击上方“溪流之海洋人生”即可订阅哦为更好地开展风力发电场建设,提升海洋风力发电能力,做好海上风力发电场对当地海洋环境影响评估是必要的。首先,风力发电机组水下基础部分在潮流及波浪的共同作用下,会对其所在海域的水下地形造成影响,该影响一般沿着潮流方向形成冲刷沟,进而生成桩基础水下部分附近的侵蚀坑等水底地貌,通过桩基础冲刷检测,可以了解海上风电机组水下基础部分的建设对该区域水下地形地貌的影响,还可以了解该影响是否会对类似水下构筑物产生位移、倾斜、坍塌等危害;其次,通过数据采集和历史数据的反演可以建立海域地形变化数据库,对未来可能出现的变化进行模拟,预判有害影响的发生,变化过程及结果。海上风电场安装和运行在海洋环境当中,相比于陆上风电场,其自然条件更为恶劣,设备运行时受到风荷载、地质、波浪海流等多种复杂荷载的叠加影响。其中又以海流对海上风电场水下结构的冲刷影响最大,因此,对其冲刷状况的检测已成为运维保障的关键。 0 ~# i; B& [# y c" T+ U t R3 b
一、工程背景 : Q5 K' h5 u) b: ~) v2 B( ?& A
⒈区域概况
& t+ m7 m% D6 b& K 本项目目标海上风电场位于南黄海辐射沙脊群边缘,海底地貌属于水下浅滩、水下岸坡地貌单元,有部分沙脊,海底地形相对平坦,属于近海浅水区域风电场。该海上风电项目距盐城王港最近约36km,最远约40km,东西长约10km,南北宽约20km。以37#升压站为中心,将风电场分为南北两场区。海上风电机组分布如图1所示。  + l& r5 K- I7 \* J
+ l& r5 K- I7 \* J 图1南黄海海上风电机组水下基础冲刷实测区域及风电机组分布
$ v! n# C. ]3 ]/ ^/ w" P2 J) k 该海上风电场大部分水下基础为单桩型,如图2所示。于2018年7月、2020年9月分别对其进行两次冲刷监测调查。相较于2018年测量结果,2020年初次获取北部场区风电水下基础地形,并结合天文大潮对南部场区东沙脊处浅滩风电水下基础进行测量。  ! h$ k1 [# _1 K, K7 o8 ]$ u1 t
! h$ k1 [# _1 K, K7 o8 ]$ u1 t 图2固定式单柱桩台 ) m. Q3 k# H& \; }( N( Y4 s4 e/ M
本文所采用数据,平面基准采用CGCS2000坐标系,中央经线为122°,高程基准为1985国家高程。 ) s: N* C, h: W d
⒉海域形势
+ _9 U* }7 v- v2 a3 V, C6 j, L/ w0 J* ` 作业海域为南黄海辐射沙脊群。王颖等指出辐射沙脊群是呈辐射状分布的出露于海面以上的沙洲与隐伏于海面以下的沙脊以及沙洲或者沙脊之间潮流通道、潮汐汊道的总称。南黄海辐射沙脊群位于江苏省中部海岸带外侧黄海南部陆架海域,北自射阳河口,南至长江口北部的蒿枝港。南北范围介于32°00′N~33°48′N,长约200km;东西范围介于120°40′E~122°10′E,宽约140km,总面积28000km2。大体上以弶港为顶点,以黄沙洋为主轴,自岸成展开的褶扇状向海辐射,由9条主沙脊和分隔沙脊的潮流通道组成,沙脊槽相间分布,其中大型沙脊在低潮位时露出水面,从北向南为东沙、麻菜珩、毛竹沙、外毛竹沙、蒋家沙、太阳沙、冷家沙、腰沙、条子泥。分隔沙脊的潮流通道及潮汐汊道众多,水深多介于0~25m,个别深槽最深处可达38m。大型通道的水深超过10m,甚至更深。主要通道有:西洋、大北槽、陈家坞槽、草米树洋、苦水洋、烂沙洋、网仓洪、小庙洪等。 ' Y V2 r5 k$ n" j3 Z
⒊水动力及水文泥沙环境 Z7 t' v ^/ C8 \7 y; D
本海上风电场所属西洋水道位于辐射沙洲北翼,受黄海旋转潮波系统控制,潮汐性质为正规半日潮。该区域潮差相对较大,平均潮差3.59m,最大潮差为5.25m。近岸风场常风向为SE向,频率13%,次常风向为N、E、NE向,频率8%。强风向为N向,最大风速21.3m/s;次强风向为W向,最大风速18m/s。
# i( }9 d3 ]0 x/ R" b- r- w 二、理论研究
7 D) I* T2 K& D' ?* B 为理解海上风电机组水下基础侵蚀冲刷,首先,应了解其所处区域水文状况,认识到潮流的常年往复冲刷会改变水下基础附近水下地形;其次,应认识到水中单柱结构受水流影响时,会对周边海底环境造成影响,进而应认识单柱桩对周边环境造成冲刷的原理和过程;最后,应了解海底面冲刷现状对水下基础影响是否受相关规范限制要求,进而明确使用的相关规范中对此类影响的限制条件。
* X( f$ s W2 B ⒈区域水文 * E; W% I" @2 [' X
林伟波等指出研究区域位于南黄海辐射沙洲东北部V4站点附近,V4测站流向受地形影响最为明显,呈现旋转流趋势,潮流速从北往南逐渐减小,大潮时V4的最大涨潮、落潮流速为1.09m/s、1.25m/s。小潮时期流速明显减小,V4的最大涨潮、落潮流速为0.57m/s、0.63m/s,如图3所示。  / C8 U, I& z3 J7 _3 }/ |* S / C8 U, I& z3 J7 _3 }/ |* S
图3南黄海垂线平均流矢图
0 B& g; Q- q4 z: ^3 w ⒉冲刷特征 9 v5 o4 H" u& g6 l2 |8 J8 K
林明惠等指出单柱形水中构筑物的建设必然改变了原有的水流特征,使原有的河床冲刷环境发生改变。当水流流经桥墩时,迎流面阻滞了水流,改变了水流结构。单柱桩周围水流结构主要包括墩前水表面涡流(分为上下两股水流,向上部分将动能转化为势能,向下部分在桩前形成涡流,将桩底部海床淘离)、桩前向下切流(与表面流下切部分形成合力,产生下切流,造成桩前冲刷)、马蹄形涡流(下切流在桩前形成,具有最大冲刷能力)和尾迹涡流(水流绕过桩柱后形成湍流),如图4所示。  % q+ B R& g0 _3 o* v % q+ B R& g0 _3 o* v
图4单柱桩冲刷示意图 4 ^4 _$ o$ t' E
⒊理论成果
9 s1 {; B5 q; k# K 根据现有的研究成果,韩海骞公式、《公路工程水文勘测设计规范》(JTGC30-2015)中65-2式、65-1式在实际应用中较为广泛。 - l, }; A2 x8 `
张玮等和祁一鸣等利用现场实测数据和物理模型试验等方法研究了江苏近海风电场桩基局部冲刷深度,通过与实测数据对比,发现采用叠加波浪作用下的韩海骞公式进行局部冲刷深度计算更为合理。 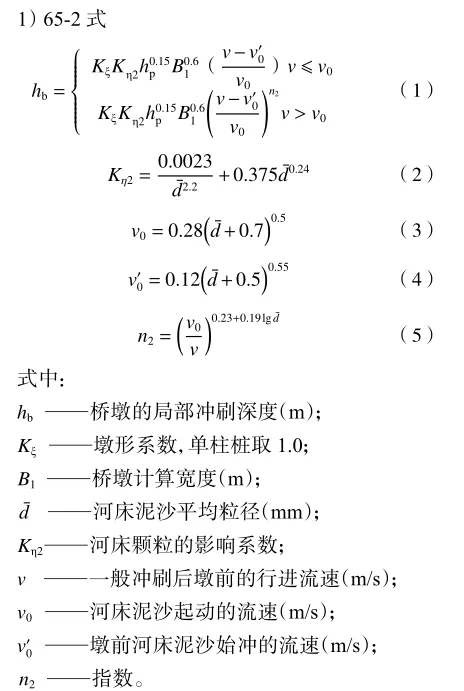 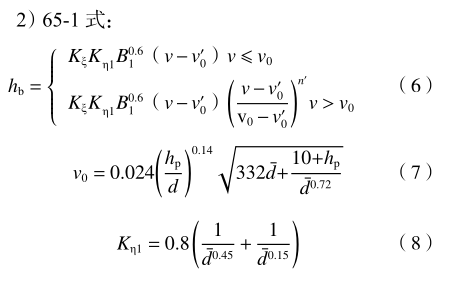 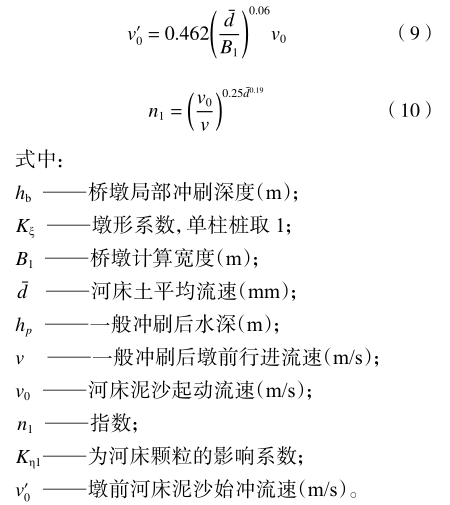  / K2 b* n" E3 A0 k1 J+ X+ p: \) K / K2 b* n" E3 A0 k1 J+ X+ p: \) K
三、案例分析
0 W$ K0 a, t0 i# B/ J ⒈所用设备 ' ^6 J& o7 _4 L* E
本文采用RESON牌Seabat-7125型多波束测深系统,该系统可以在四级海况下稳定获取水深数据,测深精度为3cm,平面定位精度为0.5m,航向精度0.001°,声速测量精度0.001m/s,系统组成如图5所示。  & ?; x% r1 ~+ Q9 ^- S
& ?; x% r1 ~+ Q9 ^- S 图5多波束测深系统设备图
( X( n% D e# y' b8 d/ N# } ⒉所用软件
9 N b9 a. d; b4 m 本文数据采集使用PDS软件进行,数据处理采用CARIS软件进行,成果图绘制采用SURFER软件进行。魏荣灏等指出SURFER软件在点云数据的三维表示、体积计算、图形结果输出中有较为优秀的数据−图形转化能力和表达能力。 - ]' ~' x) r: b1 y
⒊设备安装 ; C- P/ c9 z5 |( q! `! C* f
多波束测深系统一般采用舷侧安装方式进行,罗经及运动传感器安装在船只中线上,GNSS采用双天线形式,用以快速定向。量取各分系统之间相对距离,建立以罗经及运动传感器或测深仪安装位置垂线为原点的船坐标系。设备安装如图6所示。  & b# h" R0 t" Q. v/ Q6 A & b# h" R0 t" Q. v/ Q6 A
图6多波束测深系统安装示意图 " ~/ f; v& c2 x! T. N& i! a
⒋设备校准
( x, H+ c7 J" [ K+ }* Y 多波束测深系统临时安装受现场作业环境影响存在4种安装误差,分别是: , Q8 j$ \) i) }
⑴艏向误差(YAW),绕Z轴(相对于铅垂线为正)旋转,代表了换能器安装时艏向指向与罗经航向的水平偏转。 " X0 N+ C6 s2 M; v9 _# r) V
⑵横摇误差(ROLL),绕Y轴(船头方向为正)旋转,代表了换能器水平面横轴在安装时相对船只水平面横轴的夹角。 & A- e% s" `& ]; D. S7 W
⑶纵摇误差(PITCH),绕X轴(左舷为正)旋转,代表了换能器水平面纵轴与船只水平面纵轴的夹角。 : F8 b' b: v. m' s" n5 Y
⑷时延(Latency),采用1PPS(1PulsePerSecond,秒脉冲)进行实时改正。 1 r7 \& y, Z8 I
换能器与船坐标系坐标轴关系如图7所示。  ' C6 Y. l. K( i! s7 u: A, ? ' C6 Y. l. K( i! s7 u: A, ?
图7船坐标系示意图 - @ N% y9 T% m
⒌数据坐标系转换 * o( v0 Z9 r U) O. P
多波束测深作业中,多波束需将换能器所获取的水深值转换至基于大地坐标系(CGCS2000、1985高程)的水深值才具有实际使用和讨论的价值。 ) S: b1 a+ v7 I: r
多波束测深系统单位时间内所产生的是固定间距或固定偏差角度的一个条带状的点云(测深点),换能器可以精确地计算出每个测深点与换能器的相对位置,称之为换能器坐标系;运动传感器以设定的船坐标系原点为基础将瞬时状态下的船姿态归算至平静水面时的船姿态,修正了船只摇晃造成的测深误差;卫星定位系统以船只瞬时定位信息作为整条测深条带的定位基础,获得条带上每个测深点的大地坐标,采用数学转换关系将卫星定位系统给出的大地坐标转换为我们所希望使用的大地坐标系。
$ U: c6 V' i7 n3 W+ |, q 换能器获取的水深值为以换能器为原点的水深值(换能器坐标系),船只运动时换能器原点在三维空间中摆动,与静止时原点位置有偏差(姿态改正),换能器与其他各分系统存在船坐标系位置偏差(船坐标系),船坐标系根据GNSS定位(GNSS坐标系)转换至绝对坐标,即大地坐标系。如图8所示。  fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) ( T! T8 c9 L2 h8 x. Z
( T! T8 c9 L2 h8 x. Z 图8坐标系转换图 1 B* {& b- k5 D- b0 j
⒍数据处理
$ s, ^3 k+ }5 c2 Z x- W, | ⑴潮位改正 " f! Z3 O1 m9 V9 J
2020年9月25日,根据单一潮位站可控制半径15km区域,兼顾作业便利性,在检测区域南部布设自容式潮位仪一台,布置前气压调零,测量间隔设置为10min。经潮位改正,从而解决了多波束由于传统潮汐改正模型不合理出现的断层及锯齿状问题,最终实现多波束测深条带数据合理叠加拼接。潮位曲线如图9所示。 6 F' N" ~% _4 `) \: A' u9 M3 y
图92020年9月25日至30日潮位曲线图 . F- ~* V }; i) R5 s
通过潮位分析可见该区域潮汐性质属正规半日潮,潮波传播方向为西北偏北-东南偏南方向,即为南北向为主。本次水下基础检测外业为小潮至中潮期间施测,测量过程平均涨潮历时大于平均落潮历时,平均涨潮历时为6h25min,平均落潮历时为5h54min,具备明显往复流特征,且涨落潮平均流速变化不大。
- i6 ~7 e7 m+ w7 p ⑵声速改正
. O% P* H7 Q$ W+ a3 _ 2018年与2020年作业期间由于早晚与中午温差较大,每天进行3次声速剖面测量,测站分布于测区东、中、西位置,测站时刻为每日早上抵达测区、中午、晚上撤离之前。声速剖面曲线如图10所示。 9 m/ _5 a+ ^* f( N; j
图102018年、2020年声速剖面曲线 / V1 u% A7 r/ S# `
通过声速剖面测量,表面层声速在1500~1505m/s之间,底部声速略小于1490m/s,变化较小,在水深2~8m区间有声速变化较为迅速的区域。 5 y, a. f0 u$ J/ ]1 w7 z
袁健飞等指出声波在水体中传播时,受温度、盐度、水深、水文等多种条件的影响,存在测深点深度、定位中的影响,在多波束测深数据处理中添加声速剖面数据可以大幅度地提升测深数据的精度,特别是在水深超过10m以后的水域。 8 M' J2 P: X; z4 V4 I
四、结果分析
4 e6 G' N& f' U7 L" }6 D( o ⒈对比分析
: a3 V* Z2 t" f" n0 `: j 本文选择70#、61#、46#三个风电机组进行对比分析。70#为两次作业重合范围的最东侧,靠近作业区域东侧浅滩,2018年作业时其东部为浅滩,水深不足3m,2020年作业可以正常航行;61#与70#为同一行的东西两端,61#桩2018年、2020年时均可正常通行;46#位于作业区域中心附近,2018年时东部为浅滩,2020年时可通行,且浅滩向东部运行较远。各桩基位置及编号如图11中黑色圆点所示。
3 @1 Y/ o4 @3 G( I; n0 P9 k 图11对比分析所选风电机组 3 _0 X | \9 t# t
桩基冲刷监测时,以桩基为中心,半径60m设置为调查范围,如遇到冲刷槽应探测完整。部分站位探测范围半径超过120m。
& a9 s- i# @* ^8 Y% C/ _ 70#风机机组2018年时海底面高程约9m,冲刷造成的海底面流失较为明显,水中基础裸露,水下基础周围地形下降,西侧出现较为明显的冲刷坑。在南部出现地形下陷。整体看最大深度13.4m;2020年时海底面水深降至10m以下,东西冲刷范围有所缩减,南北向形成明显冲刷槽,南北向可见较为明显的淘离。70#风电机组水下地形伪彩二维等值线图如图12所示。
9 ?+ k; y: v. \# I1 {" a 图1270#风电机组水下地形伪彩二维等值线图 + R, y" q/ d3 w3 W
61#风机机组与70#机组东西分布于风电场两端。2018年时海底面高程约10m,冲刷造成的海底面流失较为明显,南部有较为发达的冲刷槽,北部较小,呈水滴状,与理论中马蹄形涡流形成的淘离结构最为接近。2020年时整体海底面降至12m,形成南北向冲刷槽。桩柱周边水深变化稍缓。61#风电机组水下地形伪彩二维等值线图如图13所示。
9 P" o/ c8 O: F; E; n 图1361#风电机组水下地形伪彩二维等值线图 ; ?! I$ J! V2 g/ U' A2 M
44#风机机组为本海域中心位置,水下地形伪彩二维等值线图如图14所示。
! T$ T( L# w k2 S6 O& [ 图1444#风电机组水下地形伪彩二维等值线图 " U: A& Q; J* C: \
44#风机机组2018年海底面高程约15m,冲刷造成圆形侵蚀,南部有地形崩坏。2020年海底面降至16m,冲刷槽明显。 1 g4 W2 N5 [! ~
通过套用韩海骞公式,计算各桩基冲刷槽冲刷深度、实测深度进行统计,结果如表1所示。 / ?& j$ i- d8 w9 ` B# E5 H
表1 冲刷深度对比表 ! a# s- k. }+ U% L$ ]7 z
由表1数据分析可知:
Y: f+ S" r4 @2 g ⑴西南部与中部相比,2018年冲刷深度分别为4.3m、4.6m,2020年冲刷深度分别为3.7m、5.7m。不同年份冲刷最大深度变化趋势一致,均为加深,西南部加深幅度较大为4.9m。 " t% L$ |; c8 T$ e' n! p6 S0 z- T
⑵东南部与中部相比,2018年冲刷深度分别为9.7m、4.6m,2020年冲刷深度分别为11.8m、5.7m。不同年份冲刷最大深度变化趋势一致,均为加深,东南部加深幅度较大为2.1m。 1 U4 F& ?$ {& _! j8 q% x7 c( y
⑶通过韩海骞公式对各桩基冲刷深度进行计算,中部区域计算值与实测值差距较小,东西两侧差距较大。
# A0 v/ ~0 L! J3 s" A0 p 闻云呈等指出目前的概化理论对单柱桩在潮流与波浪作用下的冲刷成果进行描述时会出现成果不连续,恒定流冲刷试验与潮流冲刷成果差异明显,恒定流试验成果应用于潮流成果时应谨慎。 7 S- I' j l# o
⒉分析总结
' u0 {7 _6 F+ l2 A' @ 综上,2020年平均水深较2018年出现整体加深,风电场东西两侧冲刷程度较为严重,相较于中部区域最大水深变化幅度更大。理论公式在计算冲刷深度时,在海底面变化较为平缓的中部区域实测结果与计算结果差值较小,东西两侧则差距较为明显。
* Q8 m# l- g6 @6 M 五、结论
# d+ V9 ~2 k* C9 ~) H5 e+ f+ T; f 本文结合现有理论研究成果和实际调查成果,分析了南黄海附近海上风电场单柱桩冲刷,得到的主要认识如下: ( [) c/ z8 e8 Z
⑴多波束测深技术可以完整展示海上风电机组水下基础部分的冲刷状况,通过对调查结果的伪彩填充可以直观地了解冲刷深度、范围,冲刷槽走向等,利于后期维护时进行准确的抛石、固化土填充作业。 ) n) _9 F- S! ?
⑵单柱桩水下冲刷槽随时间增加变得稳定,最终表现为冲刷槽走向与潮流方向接近。
) |2 F3 H3 l0 E! \6 U' k; q ⑶现有冲刷结果概化公式给出的冲刷结果较为保守,只适用于对可能的冲刷槽最大深度做出估计,其误差来源于水体中悬沙、实际潮流方向、底质变化等多种外来因素的综合影响。 + {3 T: ^ T% \3 w
未来可以改进与思考: & u8 d: O w. F) W
⑴海上风电机组水下基础附近安装ADCP(声学多普勒流速剖面仪)可以方便地进行桩基础附近流速流向实时数值采集,通过实测数据的添加,优化冲刷概算公式的成果,提升概化公式的适用性。 % v7 T$ c- D2 F, D7 y& Z1 p/ S
⑵风电场范围内进行长期综合水文联测,比如选择风电场四至坐标附近进行水文浮标布设,以月为单位进行风电场内悬沙调查等。以此为基础,结合较为流行的MIKE21或者FVCOM等水动力模型,可以提升水动力模型反演精度。 . J" o2 h9 ~4 j7 M9 w
⑶以季度为单位进行桩基础检测,积累其冲刷槽变化、水下地形变化数据,便于冲刷槽发展状况统计,同时依据所掌握的历史数据开展数据模拟,建立相应的数值模型。 / X- v" G+ m4 P3 N
⑷综合多种数据,进行相关性分析,寻找海上风电场水下基础侵蚀的作用过程通用规则,和对应地区、海水情况等的特殊模式,为桩基侵蚀预防做好数据支持和养护依据。
3 i3 A' J7 \, ?, B6 X7 [7 B3 z- \ 1 ; a0 E- K+ I5 e+ O# \0 \
END
) S. J, y9 i- A3 H 1 6 _& x6 H& N/ L& u8 s
【作者简介】文/郑晖朱婷婷何志云戚永乐,分别来自眼点(上海)智能科技有限公司、江苏省测绘工程院、彩虹鱼科技(广东)有限公司和中国能源建设集团广东省电力设计研究院有限公司。第一作者郑晖,男,1985年出生,男,江苏南京人,南京信息工程大学地理信息系统学士,工程师,主要从事海洋调查工作。本文为基金项目,广东省海洋经济发展(海洋六大产业)专项资金项目“海上风电场海洋环境立体监测网关键技术及装备产业化”(粤自然资合〔2021〕37号)。文章来自《南方能源建设》(2023年第1期),用于学习与交流,版权归作者及出版社共同拥有,编发已取得作者授权。 & l6 L0 U. u3 e' R( `
相关阅读推荐 海洋技术▏3D声呐在海上风电场水下桩基和海缆检测中的应用技术交流▏侧扫声呐技术在海上风电场施工中的应用海洋技术▏海上风电勘测中的物探技术海洋技术▏多波束与侧扫声呐在海上风电场水下结构冲刷检测中的综合应用海洋论坛▏联合多波束和侧扫声纳的非掩埋海缆调查技术海洋论坛▏海上风电运维技术的发展现状与展望 ' |! ?# \0 A- q
公众号
0 ?% |" p7 u3 L z: @& I 溪流之海洋人生 8 u- a4 d2 ^3 n! [* N$ Q+ w8 O
微信号▏xiliu92899 m, h+ o' d1 n# q
用专业精神创造价值 6 p, L+ L) }' T" ?* ~: K, j( _
用人文关怀引发共鸣 您的关注就是我们前行的动力
6 C" C9 R; J5 D3 ^( W6 B* m { 投稿邮箱▏191291624@qq.com
! i6 h+ [4 |( G- k/ I1 N. F* a7 E. A4 K
9 C! d4 x2 d' t, v0 @
u; F; ^- x* J. h1 `! v. y1 z
4 i, s9 q+ q# \3 F | 

