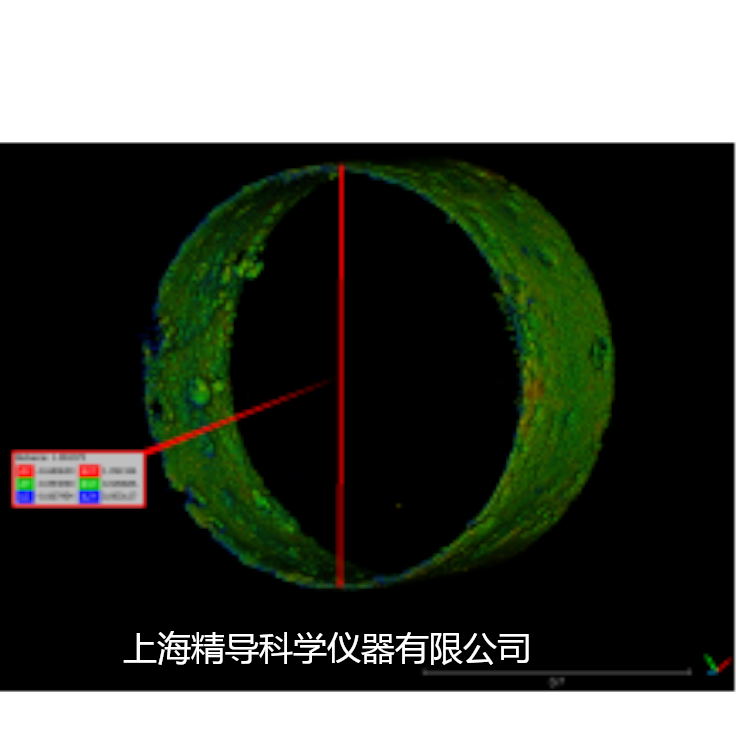
水下三维激光扫描仪2G Robotics实验水槽地形测量 核心参数详细介绍应用场景:管道爬行器、机器人机械手、水槽、扶正器/自定义支架
4 K) g' Z* q; ^# c$ i# }3 w ; `3 B! s: O* B
技术参数:
& a2 m1 q g& V# q9 p8 H5 }, } 1m量程 2.5m量程* ^& ]$ X) p9 I6 C' c1 R2 {
量程: 0.13m-1m 0.36m-2.5m
' {7 W- b- n; I6 J每线激光点数:480个
" b& Q5 B; y1 d) a r+ W4 O视场角: 50度9 n9 h$ R, Q# F4 M3 s3 A
X轴分辨率 0.3mm@0.13m 0.7mm@0.36m + D" G- a; ]" m
(沿激光线) 1.2mm@0.6m 2.7mm@1.4m$ L0 p9 ^7 v7 p8 ?; W) S* w2 ?
1.9mm@1m 4.9mm@2.5m
* @2 X4 q6 v0 J$ K6 RY轴分辨率 0.05mm@0.13m 0.1mm@0.36m * x5 [0 v1 D w0 Z. M4 H
(断面-断面) 0.2mm@0.6m 0.4mm@1.4m7 Z( W X& q; h4 d
0.3mm@1m 0.9mm@2.5m
1 q* k' u% o- B" X# M' u+ X& S剖面速率: 9.9Hz4 n, e) c8 L9 H; N! F) I. z7 Z2 `
激光: 40mW,Class 3R级,520nm 75mW,Class 3R级,450nm
6 w9 l/ m/ _9 Z5 ^9 o功耗: 7W(大),12-24VDC' X2 x4 P& n0 v2 b
通讯: RS485半双工或USB
1 b8 G, l+ K; c6 F& y重量: 2.4kg(水),4.3kg(空气) 2.6kg(水),4.7kg(空气); b8 y. A, j8 D
耐压: 350m6 E$ i) u* @2 X3 p
数据采集软件:出厂包含采集软件
; x! v! [" Y! w2 Y( r" M+ u/ ^/ G' p* F校准: 出厂前校准
( j# P: X, @# R. D* s) q7 X输出数据格式: .XYZ(CSV)
& x" o8 _6 b5 g6 X o6 Y# G5 V' `# X1 Q- g' ^1 V
产品优势 毫米级分辨率,空气或水中工,连续360度扫描,3D 点云数据,非侵入性的扫描: 集成旋转云台,简单的用户界面,可非侵入性地扫描目标物,扫描时无需任何外部辅助传感器
2 Q6 f. e- O+ S$ T! ?6 _! x,体积小:可在狭小空间范围内稳固操作 |