传感器
$ e6 t$ T9 y' H+ x | 范围% f/ q0 z, A7 q* W, v+ f
| 精度 A! B8 `+ {' q5 v$ Z' O) G
| 分辨率/ o/ E9 X h( T" s
| 耐压水深
4 e' R+ }5 {8 P5 Y) ]; x) M |
压力
5 c2 h- I3 ?2 F3 V6 m3 R: u | 0-3000dbar. A. f. e! ?6 W! n* a' }! ^* B; S
(0-6000dbar可选)
& P- m6 I* T1 w$ w | ±0.1%FS
; Y( Q% E( ]" I# o( R0 m | 0.002% FS
/ D' w/ k: _7 w1 } | 6000米* r- H! x+ S6 j" o
|
温度
4 D7 ?$ O/ D) |2 H8 o | -2~+32℃
{6 K) H% z& M1 \ | ±0.005℃0 F3 E/ F: g! Y8 B! s/ q
| 0.0006℃
( s# r" n* B: \+ w% ~" E9 w5 m | 6000米# d1 v. j1 ^1 Y
|
电导率' v7 B8 p- S7 r
| 0-65mS/cm
4 B: {8 m* ^9 G! T% h" w | ±0.01mS/cm9 X3 X$ }5 t& ?; g% J+ w" `
| 0.0003mS/cm
/ D2 C' d, K2 f! Q | 6000米 v. o* j* t$ o) d7 C' [% ?4 [
|
叶绿素a
8 V& n% `) v2 k | 0-150μg/L
9 V- V/ e" t: ?/ ]9 f | ±2%FS7 w0 j. ] T' x4 k& |& b, ?( c7 g
| 0.025μg/l
4 H8 E4 {3 b7 r, o7 t& q' |+ N8 x | 6000米8 M0 J/ p& P2 c& o2 \( u
|
浊度4 Z' C% T5 w) F* ~: o
| 0-650 FTU
1 ~- H0 |1 W6 j( ^7 E9 O( ~ | ±2%FS) B9 H2 |" f# e1 H' A
| 0.1FTU4 z& i) j8 v/ o7 O# {
| 6000米
2 x& d2 X0 V: G1 e2 I% g- o; R |
| 小型Mini1 c! w" I( d- s1 }- C1 m1 c4 U# M' j
| 中型Midi
4 M" ~4 T2 N' D% y! x | 大型Maxi
) ~$ S8 x* x# w J1 Z5 ? | 猛犸象型Mammoth
4 ^+ I1 T* g+ }# b$ c- B0 P |
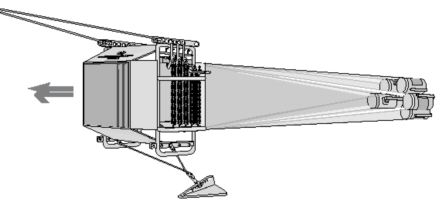
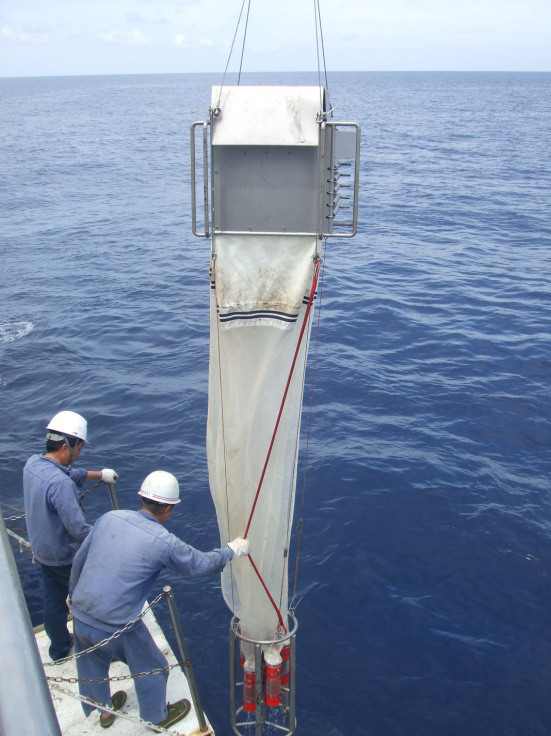
水下单元:2 f5 S: G! j# v4 x* M
|
尺寸:' q# Z% l3 f+ A& d
宽*长*高/ J1 o" P' r' }- a" P- m3 E
| 65*90*80cm
& e) {4 v5 M+ Q$ ^ | 80*90*95cm
2 l0 R4 c1 m2 x9 Y" \, M | 120*110*135cm
9 h' c' @4 _7 N' ?; B3 W! U* o6 z | 150*120*160cm
" K4 D1 J6 J( s% P$ { |
网开口* t7 c" W0 d1 |) _: G
| 35.5*35.5cm# ^- q* z& Z$ ]- x
| 50*50cm" d$ ]6 v3 ~- S
| 71*71cm
4 ?3 K% | M+ |& P | 100*100cm
4 W3 T% D- X! E |
网袋: p" F3 J: _3 N. v9 M7 J
| 5个/160cm长
/ s' K8 ~ |# @2 b | 5个/250cm长) X& c, y) \* i. Y! q. N
| 9个/365cm长
' `6 y" Q* e9 Q- T | 9个/550cm长: K& n W; W3 ?0 A
|
标准网孔
3 k! ]3 `( @% M7 L) `. @ | 300μm/ f+ Z% F5 x5 c) L u3 b
| 300μm
0 l# p4 w; w4 J: K- Q | 300μm& B9 t. A) X4 |% i) |
| 300μm1 x! R5 O9 l8 [: {3 T
|
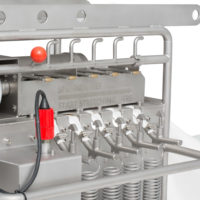
网底管
' j7 p4 D: z9 e6 Q7 C; `7 i# q! J | 5个/直径11cm
" k9 c! b" W! J' B& j2 ^ | 5个/直径11cm
/ U7 B! ]7 K, X6 e3 f3 L' Z | 9个/直径11cm
, {3 F! @. C8 E | 9个/直径11cm: L+ v C9 z3 [% Q/ P( W6 M
|
工作时系统总长度
( ?% d: J# ] y- O+ z: E, M" P | 470 cm
3 P1 x+ {0 n5 s | 560cm
- C( C& y& F* v) S | 800cm: R0 m% m- x% c5 o; N* O
| 1000cm
M" e1 \+ C, k; \- m5 m" J7 t |
工作深度5 \( i6 [6 E5 I) _+ ?6 F z4 v" G ]
| 3000m/6000m/
4 o! f% [$ f! ^+ N11000m
" H# [5 E) y& U5 w | 3000m/6000m/
5 n+ B X9 J: b6 C! t9 U/ L$ q11000m% d: @3 Q% q( ?4 y
| 3000m/6000m/
5 j/ V0 R8 J! L11000m% m+ K2 @2 ]9 O* y" J" m& Y% V; E
| 3000m/6000m/
1 ~. O9 W: ~9 O5 {% w# Y: K& r9 G% b11000m- u( ?7 D, i7 V$ m
|
压力传感器
! R. a6 |$ n5 p; M4 C& D2 Z | 3000dbar±0.1%f.s.: i9 {5 @+ x, m+ w4 V4 s, C) P& s- e
(其他范围可选)6 @$ c& L! l2 H
| 3000dbar±0.1%f.s.
M# W; y/ \9 Q& V0 F- w(其他范围可选)
3 D0 ]0 A4 K+ _2 V0 t; ] | 3000dbar±0.1%f.s.
5 A" ? f+ u x(其他范围可选)# r6 M3 L9 c- A- q
| 3000dbar±0.1%f.s. V8 K5 W# j; y2 Q6 k+ B% ?
(其他范围可选)
6 W, b1 X5 i& C& L! _9 Z |
| 小型Mini3 C# e. S* X" l! d% p
| 中型Midi
) J" d- |( _: t | 大型Maxi
2 V3 D9 [9 N( l/ B- D9 p( `- P" y( z& V | 猛犸象型Mammoth
9 M) i, d) s" ]5 J. U# d5 K f |
重量:
% D$ g' n% o5 L( _ |
网框
3 G9 X/ w" a5 z+ m | 75kg
0 G @5 s/ p, x' X | 100kg
% o# T3 _) p; D! O' [. g | 260kg1 |9 A0 D1 A- J/ U% R' Q, j
| 390kg' l* |: C1 O& f# E; F8 s( [. ?: ^5 t
|
不锈钢支撑
8 f1 {) k- Z; Z& i | 30kg& S& |; M9 v: |1 A
| 50kg
) j% e/ J" H9 L3 f | 70kg
3 s8 s/ i' B- N6 T | 100kg
2 v% e" ?+ U0 B& M+ l/ N0 _ |
V-Fin
) z* z x! _: j$ Z0 h: ~& w- W深度抑制器2 ]1 y. V% \( ~0 M$ Z
| 22Kg/ z5 W/ G6 z7 } _) v. H3 M; W
| 22Kg
, W! e N6 B# f: ^9 ^ | 70Kg( F+ J! h+ D/ Z! k$ r B9 S
| 70Kg
: V# v3 x$ F6 G: i- b |
材质:
6 D$ _" ^' E( n/ Y2 D1 d/ m6 { |
网框4 N1 a& C; n5 k; Q
| 不锈钢
5 e: n4 ?$ [. D8 [ | 不锈钢
5 e* Y; e) h; b8 V( [* q5 _7 g. S& k2 Q | 不锈钢* g3 k8 h$ V; u2 s3 F
| 不锈钢
: } r3 C" M4 s) U7 W: l3 @ |
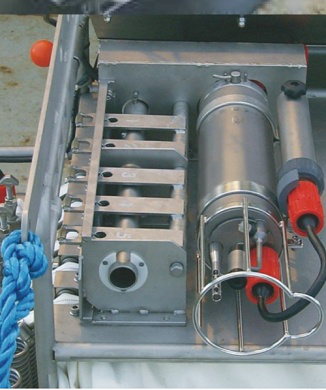
马达单元$ W* l J, W. L) m
和电池舱
( W0 J! _( S- Y& r5 B4 X* b | 钛合金
6 s9 R( x3 B) Y: t! f& h: P | 钛合金1 S7 I1 x3 i0 U; [/ H
| 钛合金
+ ~' z( t1 @4 s& e# G7 [ | 钛合金
, o6 L# T$ Q9 b$ W |
网袋
- m, K+ z. ^' x! U | 聚酰胺! i+ x0 l& n# x. e6 j+ h
| 聚酰胺
6 E# \ d M5 @ | 聚酰胺9 p5 Z9 N5 O( V$ l/ i/ i# T% z
| 聚酰胺4 W: H* d; r7 Y j0 ^
|
网底管* R9 o w* u6 {4 l- Y
| PVC
" `; @- _1 X9 f9 m8 {# ?% s | PVC: J& A0 \9 {6 c% c
| PVC
' h3 {0 }( J% x; B; u2 ]: y | PVC
7 ~! \6 q' l) {7 K, D6 V" } |
V-Fin5 s' S, ?' `9 ]: J: B' c* R
深度抑制器6 d* V% Y! K( c/ o6 t) T
| 铝9 Z/ }5 H. J* \2 p% t+ r" ~
| 铝
9 Q5 E0 Z* |( ~ | 铝) p7 ^ V. G$ ?5 ?( p: p
| 铝
& p2 o, h- t) a8 F0 O) u! f |
断裂负载:7 N$ a$ S: ^6 V+ x( f( N
|
浅水工作(0-500m)$ C; a+ c( H( ~+ k1 U C" Z
| 约1500kg+ p8 d1 F6 d7 I! k& ]- P3 M( N: v! M
| 约2000kg* {( m7 x! w( r8 k) w! B3 x" q
| 约4000kg, c$ S+ w6 U1 L$ @" L
| 约8000kg
, v' _0 |( B$ H/ ? |
深水工作(500-3000m)! R% {( ^( U6 z/ @
| 约5000kg/ {( A8 c4 q! Q$ k+ e% T- O; t
| 约8000kg
4 N# d: q0 z0 E | 约12000kg
9 Z: V0 c1 Z) G* B f- i' Z0 } | 约18000kg
, z5 _" g; g2 J0 v' J' @ |
电气连接参数:
/ x& s& i+ K; {$ F9 y2 j8 d# \ |
连接插头; J0 A! C# L! o" I4 M
| SUBCONN BH 2 M3 j! z/ h. i. }! ]+ o; I0 m8 s- A4 I
| SUBCONN BH 2 M' l7 ]* r4 b/ H# h+ Q
| SUBCONN BH 2 M
1 p$ ], w( c, F$ K/ U | SUBCONN BH 2 M# C0 o S/ I' T, n8 r/ R" j0 G
|
电缆反向插头
6 n6 f p$ @( h | SUBCONN IL 2 F
3 V. r2 T" T8 S$ L! G) y: p) } | SUBCONN IL 2 F
# ^8 V$ T" n6 c6 d | SUBCONN IL 2 F* I2 [. c; ^4 G' ?! x' S; M
| SUBCONN IL 2 F# X, ]+ k/ t$ ?. D8 t: ~9 K' ?" b$ q
|
电缆连接) _. z$ q5 L9 c' U9 v
| 单芯或多芯电缆
`! ?' j# i. |/ ? | 单芯或多芯电缆
+ t- m2 w! x( G1 z | 单芯或多芯电缆& `5 H( V" k( j" k+ X7 \ g/ C# h
| 单芯或多芯电缆( h0 U4 k4 q1 Y( U& R; Y% w: \ d
|
电缆电阻(回路) O3 B+ s" I5 m! G( u; l$ D
| 1000Ω
& V; [4 s2 _* y5 \% |% w | 1000Ω3 E7 \! [& u4 [; ]: ]' l
| 1000Ω
2 g5 I0 X0 R# x0 a1 k | 1000Ω1 Y& [, L- P, K0 C! |) Y. A e; P$ ^' U
|
甲板控制单元' V' W0 E0 g1 n
| 通过按钮控制网袋的闭合,显示网袋序号,压力,电池状态,通过网口的水的流量和流速等;带LED背景光的液晶显示器;与PC连接的RS232接口
r, N" O2 c2 @& J2 r9 M) p |
电源:: A+ h5 s. ?3 M! t. B* {0 U4 R
|
水下单元
# ^" ?( r- s# P1 k. ~! ^$ ? | 3节3V锂电池供电
# O: l5 l; U3 |" K$ {8 t* U | 3节3V锂电池供电) q% B2 w7 I V: L8 L& H4 a- t; I
| 3节3V锂电池供电- g: F! c3 v% t# d3 F* F9 w/ j
| 3节3V锂电池供电% r, |# O5 ]% O. e: x2 c
|
甲板控制单元
2 Z' [( G3 r( |# s1 X; M2 Y | 85-260V AC
( L. e( j0 S- _% Q- Q | 85-260V AC; l3 i4 u& Y6 n( W
| 85-260V AC
( G ?- r0 s8 c6 Q- N* M | 85-260V AC& ?' b2 B; s: b& k7 n
|
拖网速度(当网袋的孔径为300μm时): L. v+ j- Q8 E$ y ^: n
|
水平操作
' b0 D3 ~# J. n6 _ @ | . I: A ]3 `# V) ]
≤4knots
( h! j! n7 C% x+ D' [1 r3 V | ≤4knots
0 @( d. G/ e/ k& S, J1 u/ d, | | ≤4knots- p4 M1 v7 ?3 Z# Y, b
| ≤4knots
7 A' u- [, k* P. u6 V' c4 F |
垂直操作
, M' {5 R: |% y$ d5 L | ≤1m/s! F- n8 D9 s6 t- Y+ y5 E
| ≤1m/s
( M+ w$ G9 W+ e; C$ I7 l- S* Q | ≤1m/s
8 R7 i8 |$ f/ V, G+ P/ M# t | ≤1m/s7 P s8 U1 d5 P/ F$ G5 L
|


 ; s3 B& r1 W8 p% @ Z7 ^% Z
; s3 B& r1 W8 p% @ Z7 ^% Z

 1 s* \+ ~4 [+ ~" Z& K1 k# o
1 s* \+ ~4 [+ ~" Z& K1 k# o
 , C) R; M8 h4 ^" S; N
, C) R; M8 h4 ^" S; N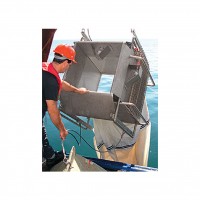 ! i ~( C9 O5 X! Q
! i ~( C9 O5 X! Q 8 l2 {6 u* ~, k- J
8 l2 {6 u* ~, k- J
 2 d" r P( Y0 T' h+ {1 B5 V% Y
2 d" r P( Y0 T' h+ {1 B5 V% Y


 ' Y. Q; n& z) y7 ^
' Y. Q; n& z) y7 ^

 # q8 N# L, P3 Q8 W& z" A; Y9 c
# q8 N# L, P3 Q8 W& z" A; Y9 c