|
1 U- z, d8 [8 M* V6 N. w& k
иҝҷзҜҮж–Үз« д»Ӣз»ҚдёҖдёӢSEAй©ұеҠЁеҷЁдёӯпјҡ зәҝжҖ§еҠЁеҠӣеӯҰжЁЎеһӢеҸҠе…¶з®ҖеҢ–пјҲLinear Dynamics Model and its Simplificationпјү;еҠӣзҹ©жұӮеҜјпјҲTorque DerivationпјүиҝҷдёӨеқ—зҡ„еҶ…е®№жҳҜеҗҺз»ӯеҲҶжһҗSEAеј№жҖ§дҪ“еҲҡеәҰйҖүжӢ©пјҲStiffness Selectionпјүе’Ңзӣёе…іSEAеҠӣзҹ©жҺ§еҲ¶пјҲTorque Controlпјүе“Қеә”еҸҠжҖ§иғҪзҡ„еҹәзЎҖгҖӮеӣ дёәSEAе·Із»ҸеҮәзҺ°дәҶе°Ҷиҝ‘20е№ҙпјҢжүҖд»ҘзәҝжҖ§еҠЁеҠӣеӯҰжЁЎеһӢе’Ңзӣёе…іеҠӣзҹ©жұӮеҜјйғҪжҳҜз»Ҹе…ёеҶ…е®№вҖ”вҖ”Nothing Special. 9 u3 m0 ~) G# A
жҲ‘еёҢжңӣйҖҡиҝҮжҲ‘зҡ„и§ЈйҮҠпјҢиғҪеӨҹи®©д№ӢеүҚжІЎжңүдәҶи§ЈиҝҮSEAзҡ„дјҷдјҙ们еҝ«йҖҹе…Ҙй—ЁгҖӮ
+ Y0 x* L" b1 l; v: `4 s5 N йҳ…иҜ»жҸҗзӨәпјҲзәҝжҖ§еҠЁеҠӣеӯҰжЁЎеһӢEq. 7пјҢEq. 8йҮҚиҰҒпјҢеҠӣзҹ©жұӮеҜјEq. 13йҮҚиҰҒпјҢз»“и®әжҖ§е…¬ејҸпјү 1 y( e5 \9 g9 i$ f+ F Z
зәҝжҖ§еҠЁеҠӣеӯҰжЁЎеһӢпјҡ: q; C5 h1 t; y/ q: u9 I2 U
2 }8 X1 W/ O' D# X2 l
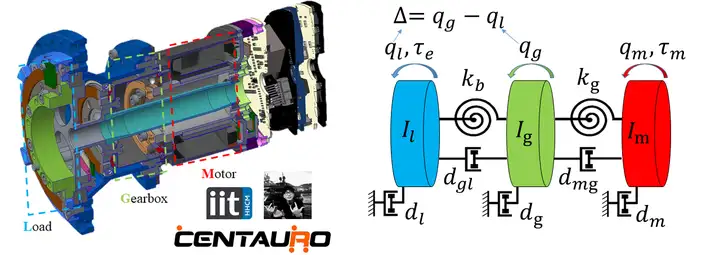
дёҠеӣҫеұ•зӨәдәҶSEAй©ұеҠЁеҷЁзҡ„е®һйҷ…зү©зҗҶз»“жһ„пјҲе·ҰеӣҫпјүпјҢжҲ‘зқҖйҮҚеңҲеҮәдәҶдёүдёӘж–№еқ—пјҡ зәўиүІж–№еқ—: з”өжңәиҪ¬еӯҗпјҲMotor Rotorпјүз»ҝиүІж–№еқ—пјҡеҮҸйҖҹз®ұпјҲGearboxпјүи“қиүІж–№еқ—пјҡиҫ“еҮәз«ҜпјҲLoadпјүе…¶дёӯеҮҸйҖҹз®ұз«ҜдёҺиҫ“еҮәз«ҜдёІиҒ”е…ій”®зҡ„еј№жҖ§дҪ“еҜ№еә”зҡ„зү©зҗҶжЁЎеһӢеҰӮдёҠеҸіеӣҫжүҖзӨәпјҡзәўиүІпјҲMotorпјү---з»ҝиүІпјҲGearboxпјү---иҫ“еҮәз«ҜпјҲLoadпјү 4 \( ^' p' S+ }3 n' Y" C" |" e/ C
е…¶дёӯпјҡ 0 @& [9 p. y- d! z$ Z
Im:I_{m}: з”өжңәиҪ¬еӯҗжғҜйҮҸпјӣ Ig:I_{g}: йҪҝиҪ®з®ұжғҜйҮҸпјӣ Il:I_{l}: иҫ“еҮәз«ҜжғҜйҮҸпјӣ - l4 U6 b2 U5 V+ J( O2 N) e
kg,dmg:k_{g}, d_{mg}: йҪҝиҪ®з®ұз«ҜдёҺз”өжңәз«Ҝд№Ӣй—ҙзҡ„еҲҡеәҰдёҺйҳ»е°јпјӣ
8 _! ` X9 i+ t& ?/ C6 Q kb,dgl:k_{b}, d_{gl}: иҫ“еҮәз«ҜдёҺйҪҝиҪ®з®ұз«Ҝд№Ӣй—ҙзҡ„еҲҡеәҰдёҺйҳ»е°јпјӣ 6 J4 `% g b* D9 i6 }
qm,qg,ql:q_{m}, q_{g}, q_{l}: з”өжңәз«ҜпјҢйҪҝиҪ®з®ұз«ҜпјҢиҫ“еҮәз«Ҝз»қеҜ№дҪҚзҪ®пјӣ
, Y3 O V1 n7 r; N П„m,П„e:\tau_{m}, \tau_{e}: з”өжңәз«Ҝиҫ“еҮәжүӯзҹ©пјҲз”өжңәзәҝеңҲдә§з”ҹпјүпјҢиҫ“еҮәз«Ҝжүӯзҹ©пјҲдёҺеӨ–йғЁзҺҜеўғдәӨдә’дә§з”ҹпјүпјӣ
, X, S4 D. ?' J4 B dm,dg,dl:d_{m}, d_{g}, d_{l}: з”өжңәгҖҒйҪҝиҪ®з®ұдёҺиҫ“еҮәз«ҜдёҺй©ұеҠЁеҷЁеӨ–еЈій—ҙзҡ„зІҳж»һйҳ»е°јпјӣ
1 f( W4 w" \& w1 ^4 F0 J7 I в–і=qgвҲ’ql:\triangle=q_{g}-q_{l}: иҫ“еҮәз«ҜдёҺйҪҝиҪ®з®ұз«Ҝз»қеҜ№дҪҚзҪ®еҒҸи§’пјҲйҮҚиҰҒеҸӮж•°пјү % r, k3 a" G. s/ o! X
зәҝжҖ§еҠЁеҠӣеӯҰзҡ„жЁЎеһӢзҡ„ж ёеҝғе…¶е®һе°ұжҳҜеҗ„дёӘжЁЎеқ—дёҠзҡ„жүӯзҹ©е№іиЎЎпјҢеҰӮдёӢпјҡ
' |+ A' m2 t3 { з”өжңәз«Ҝжүӯзҹ©е№іиЎЎEq. 1пјҡ 0 _0 ]6 X3 [" S! @
ImqmВЁ=П„mвҲ’dmqmЛҷ+dmg(qgЛҷвҲ’qmЛҷ)+kg(qgвҲ’qm)I_{m}\ddot{q_{m}}=\tau_{m}-d_{m}\dot{q_{m}}+d_{mg}(\dot{q_{g}}-\dot{q_{m}})+k_{g}(q_{g}-q_{m}) ;
+ J: W6 H, N. d8 D йҪҝиҪ®з®ұз«Ҝжүӯзҹ©е№іиЎЎEq. 2пјҡ : F' g, K/ n& i" q7 c4 e' d* D, _
IgqgВЁ=вҲ’dgqgЛҷвҲ’dmg(qgЛҷвҲ’qmЛҷ)вҲ’kg(qgвҲ’qm)+dgl(qlЛҷвҲ’qgЛҷ)+kb(qlвҲ’qg)I_{g}\ddot{q_{g}}=-d_{g}\dot{q_{g}}-d_{mg}(\dot{q_{g}}-\dot{q_{m}})-k_{g}(q_{g}-q_{m})+d_{gl}(\dot{q_{l}}-\dot{q_{g}})+k_{b}(q_{l}-q_{g}) ;
2 u" U- B6 C3 f) x: n8 ^4 h иҫ“еҮәз«Ҝжүӯзҹ©е№іиЎЎEq. 3пјҡ
6 D* \4 ^# |1 \ IlqlВЁ=П„eвҲ’dlqlЛҷвҲ’dgl(qlЛҷвҲ’qgЛҷ)вҲ’kb(qlвҲ’qg)I_{l}\ddot{q_{l}}=\tau_{e}-d_{l}\dot{q_{l}}-d_{gl}(\dot{q_{l}}-\dot{q_{g}})-k_{b}(q_{l}-q_{g}) ; " N7 @9 Y! Y5 Q" H
иҝҷйҮҢиҝҳйңҖиҰҒжҸҗеҸҠеҲ°зҡ„жҳҜеңЁEq. 3дёӯзҡ„жңҖеҗҺдёӨйЎ№еҸҜд»ҘеҶҷжҲҗеҰӮдёӢзҡ„еҪўејҸEq. 4 (йҮҚиҰҒпјҒ)пјҡ
: ^$ g& T3 k% l6 C9 b, s: J6 V вҲ’dgl(qlЛҷвҲ’qgЛҷ)вҲ’kb(qlвҲ’qg)=kbв–і+dglв–іЛҷ=П„;-d_{gl}(\dot{q_{l}}-\dot{q_{g}})-k_{b}(q_{l}-q_{g})=k_{b}\triangle+d_{gl}\dot{\triangle}=\tau; # n, ?( @# S) B& Q! H# ?. {- [
жіЁж„ҸпјҡиҝҷйҮҢзҡ„ П„\tau жҳҜе’Ңд№ӢеүҚзҡ„е®ҡд№үзҡ„ П„e\tau_{e} жҳҜжңүеҢәеҲ«зҡ„пјҢ П„\tau еңЁиҝҷйҮҢжҳҜйҪҝиҪ®з®ұеҗ‘иҫ“еҮәз«Ҝдј йҖ’зҡ„еҠӣзҹ©гҖӮеҪ“еӨ„дәҺиҫ“еҮәе№іиЎЎзҠ¶жҖҒж—¶пјҢжңүеҰӮдёӢзӯүејҸEq. 5пјҡ
: }1 m( s, q* Q; ~ вҲ’П„e=П„вҲ’dlqlЛҷ;-\tau_{e}=\tau-d_{l}\dot{q_{l}};
: m2 o5 Y, y1 H& U5 J* g е·ҘзЁӢз»ҸйӘҢпјҡеҚідҪҝеңЁиҫ“еҮәз«ҜзҺҜиҠӮпјҢ пјҢП„пјҢП„e\tauпјҢ\tau_{e} д№ҹжҳҜзӣёе·®дёҖдёӘ dlqlЛҷd_{l}\dot{q_{l}} пјҢиҝҷйҮҢзҡ„dld_{l} жҳҜиҫ“еҮәз«ҜдёҺй©ұеҠЁеҷЁеӨ–еЈізҡ„зІҳж»һзі»ж•°пјҢдёҺжңәжў°и®ҫи®ЎзҺҜиҠӮиҪҙеӯ”ж”Ҝж’‘зҡ„е…¬е·®дёҺиЈ…й…ҚжүӢиүәжңүйҮҚиҰҒзҡ„е…ізі»гҖӮ 8 a8 S6 V2 }; J1 k
жЁЎеһӢз®ҖеҢ–пјҡ" L) P) L4 \1 o4 _
йҰ–е…ҲеҜ№дәҺEq. 4еҸҜд»Ҙз®ҖеҢ–дёәEq. 6пјҡ
' W! T2 m E0 ?3 {. @ П„=kbв–і+dglв–іЛҷвҮ’П„вүҲkbв–і;\tau=k_{b}\triangle+d_{gl}\dot{\triangle}\Rightarrow \tau\approx k_{b}\triangle; 9 L+ }0 S$ `/ K
пјҲдёҖиҲ¬йҪҝиҪ®з®ұдёҺиҫ“еҮәз«Ҝзҡ„еј№жҖ§дҪ“йғҪжҳҜйҮ‘еұһжқҗж–ҷпјҢе…¶йҳ»е°јзі»ж•°еҸҜд»ҘеҝҪз•ҘдёҚи®ЎпјҢеҚі dglвүҲ0d_{gl}\approx0 пјү
) r7 ^; _8 G0 M2 T& G4 a: @3 h' _8 g' b еҜ№дәҺеӨ§йғЁеҲҶSEAй©ұеҠЁеҷЁиҖҢиЁҖпјҢи°җжіўеҮҸйҖҹеҷЁзҡ„еҲҡеәҰйғҪиҝңиҝңеӨ§дәҺжҹ”жҖ§дј еҠЁе…ғ件пјҢеӣ жӯӨжҲ‘们еҸҜд»Ҙе°Ҷи°җжіўеҮҸйҖҹеҷЁиҖғиҷ‘жҲҗеҲҡдҪ“пјҲRigid Bodyпјү,еҚіпјҡ
7 D5 b" J B" I8 [! v! j qmвүЎqg,qmЛҷвүЎqgЛҷ,qmВЁвүЎqgВЁ;q_{m}\equiv q_{g}, \dot{q_{m}}\equiv \dot{q_{g}}, \ddot{q_{m}}\equiv \ddot{q_{g}};
. u. r" }& p ?, G9 ^% x1 s4 z жүҖд»ҘеҜ№дәҺEq. 1дёҺEq. 2жҲ‘们еҸҜд»Ҙз®ҖеҢ–жҲҗеҰӮдёӢEq. 7 (йҮҚиҰҒпјҒ)пјҡ
6 s6 s9 B: ]& Z7 F8 \* K (Im+Ig)qmВЁ=П„m+kb(qlвҲ’qm)+dgl(qlЛҷвҲ’qmЛҷ)вҲ’(dm+dg)qmЛҷ;(I_{m}+I_{g})\ddot{q_{m}}=\tau_{m}+k_{b}(q_{l}-q_{m})+d_{gl}(\dot{q_{l}}-\dot{q_{m}})-(d_{m}+d_{g})\dot{q_{m}}; . h7 u% K, O; j; w! A' s4 D
еҜ№дәҺEq. 3еҸҜд»Ҙж”№еҶҷжҲҗеҰӮдёӢEq. 8пјҡ ( p1 m6 A1 }& P4 t5 B
IlqlВЁ=П„eвҲ’dlqlЛҷвҲ’dgl(qlЛҷвҲ’qmЛҷ)вҲ’kb(qlвҲ’qm);I_{l}\ddot{q_{l}}=\tau_{e}-d_{l}\dot{q_{l}}-d_{gl}(\dot{q_{l}}-\dot{q_{m}})-k_{b}(q_{l}-q_{m});
+ M; }7 X0 l. F( e: c/ ^' ~% r еҠӣзҹ©жұӮеҜјпјҡ! a! B6 t' n* t% F3 {2 M
иҝҷйғЁеҲҶеҶ…е®№дёӯйҖҡиҝҮжӢүжҷ®жӢүж–ҜеҸҳжҚўдёҺдёҖзі»еҲ—ж•°еӯҰжҺЁеҜјпјҢжҲ‘们е°ҶиҜ•еӣҫеҫ—еҲ°еңЁйў‘еҹҹдёӢпјҡ
6 k- |( Z$ a, W3 a иҫ“еҮәйҮҸ П„(s)\tau(s) дёҺиҫ“е…ҘйҮҸ П„вҲ—(s),ql(s)\tau^{\ast}(s), q_{l}(s) д№Ӣй—ҙзҡ„е…ізі»пјҡ
5 }/ V& T$ p/ w3 z& b3 `0 F П„(s)\tau(s) пјҡйў‘еҹҹдёӢе®һйҷ…иҫ“еҮәжүӯзҹ©вҖ”вҖ”з”өжңәз«Ҝдј йҖ’еҲ°иҫ“еҮәз«Ҝпјӣ
( h0 Y7 M/ \: T. v, P" D/ l# ] П„вҲ—(s)\tau^{\ast}(s) пјҡйў‘еҹҹдёӢзӣ®ж Үжүӯзҹ©пјӣ 1 V" C- X& X8 z0 E R$ Z; G
ql(s)q_{l}(s) пјҡйў‘еҹҹдёӢиҫ“еҮәз«Ҝз»қеҜ№дҪҚзҪ®пјӣ 8 m% [1 R& C, h$ l$ r. J. \ K
д»ҘдёҠеҚідёәеӨ„зҗҶе…¬ејҸEq. 7зҡ„ж•°еӯҰзӣ®ж ҮгҖӮ # N; s# S+ ]& e3 n9 \% m/ L
1. еӨ„зҗҶ qm(s)q_{m}(s) 0 n8 ~3 F0 v3 ?( u
йҰ–е…ҲпјҢеҜ№зәҝжҖ§еҠЁеҠӣеӯҰжЁЎеһӢеҫ—еҲ°зҡ„Eq. 7иҝӣиЎҢжӢүжҷ®жӢүж–ҜеҸҳжҚўпјҢ并代е…Ҙ qm(s)вҲ’ql(s):=в–і(s)q_{m}(s)-q_{l}(s):=\triangle(s) иҝӣиЎҢж”№еҶҷпјҢжҲ‘们еҫ—еҲ°Eq. 9пјҡ
$ w! u0 |5 u' D+ x2 J [Is2+(dM+dgl)s+kb]в–і(s)=вҲ’[Is2+dMs]ql(s)+П„m(s);where,I=Im+Ig,dM=dm+dg[Is^{2}+(d_{M}+d_{gl})s+k_{b}]\triangle(s)=-[Is^{2}+d_{M}s]q_{l}(s)+\tau_{m}(s); \\where, I = I_{m}+I_{g}, d_{M}=d_{m}+d_{g} * B$ E. x2 ?& `. L
жҲ‘们仔з»Ҷи§ӮеҜҹEq. 9, йҖҡиҝҮ qm(s)вҲ’ql(s):=в–і(s)q_{m}(s)-q_{l}(s):=\triangle(s) зҡ„д»Је…ҘпјҢжҲ‘们已з»Ҹж¶ҲйҷӨдәҶ qm(s)q_{m}(s) иҝҷдёӘз”өжңәз«Ҝзҡ„дҪҚзҪ®еҸҳйҮҸпјҢдёӢдёҖжӯҘиҰҒеҒҡзҡ„е°ұжҳҜеӨ„зҗҶ П„m(s)\tau_{m}(s) иҝҷдёӘз”өжңәз«Ҝзҡ„иҫ“еҮәеҠӣзҹ©гҖӮ % h7 u2 [5 X" ^% r5 L
2. еӨ„зҗҶ П„m(s)\tau_{m}(s) . P- O/ T8 p; c. V7 o. \# S
еҒҮи®ҫжҲ‘们дҪҝз”ЁдәҶдёҖз§ҚеҰӮдёӢеҪўејҸзҡ„еҸҚйҰҲжҺ§еҲ¶еҷЁ,
3 U- V! ]; @$ L6 c/ u$ y+ c C(s)=Kp+Kds;C(s)=K_{p}+K_{d}s; 0 E( {5 B5 ~5 u8 t2 j r( ` Z5 C& n3 J
иҝҷз§ҚжҺ§еҲ¶еҷЁжҳҜз”ЁжқҘжөӢйҮҸи§’еәҰеҒҸиҪ¬ в–і\triangle , 并且еҒҮи®ҫеүҚйҰҲжҺ§еҲ¶дёә пјҲпјүО»пјҲsпјү\lambdaпјҲsпјү, ; w5 B- |+ m N* |
йӮЈд№ҲжҲ‘们еҫ—еҲ°еҰӮдёӢEq .10пјҡ ! ]2 A( l. n! U" e- P- h* x2 E
П„m(s)=C(s)(П„вҲ—(s)вҲ’П„(s))+О»(s)П„вҲ—(s);where,П„(s)вүҲkbв–і(s)\tau_{m}(s)=C(s)(\tau^{\ast}(s)-\tau(s))+\lambda(s)\tau^{\ast}(s); \\where, \tau(s)\approx k_{b}\triangle(s)
6 _* k$ x T+ e+ T, x/ v- L) o е°ҶEq .10д»Је…ҘEq. 9, жҲ‘们е°Ҷеҫ—еҲ°Eq. 11пјҡ # B+ W& W: C: M- }. [
[Is2+(dM+dgl)s+kb(1+C(s))]в–і(s)=вҲ’[Is2+dMs]ql(s)+[C(s)+О»(s)]П„вҲ—(s);[Is^{2}+(d_{M}+d_{gl})s+k_{b}(1+C(s))]\triangle(s)=-[Is^{2}+d_{M}s]q_{l}(s)+[C(s)+\lambda(s)]\tau^{\ast}(s);
+ p+ ^2 g& D" e& a1 E- Y; Q иҝҷйҮҢпјҢжҲ‘们зңӢеҲ°Eq. 11дёӯпјҢжҲ‘们иҰҒзҡ„ П„вҲ—(s),ql(s)\tau^{\ast}(s), q_{l}(s) йғҪе·Із»ҸеңЁзӯүеҸ·еҸіиҫ№еҮәзҺ°гҖӮ ! }" D* ~2 e: j) l4 M, U
3. еӨ„зҗҶ П„(s)\tau(s) 2 v3 j( R" M8 F2 c" O
жҲ‘们д»ҺEq. 4еҸҜд»ҘзҹҘйҒ“ пјҲпјүП„(s)=пјҲkb+dglsпјүв–і(s)\tau(s)=пјҲk_{b}+d_{gl}sпјү\triangle(s) пјҢе°Ҷе…¶д»Је…ҘEq. 11зҡ„зӯүеҸ·е·Ұиҫ№пјҢжҲ‘们еҫ—еҲ°Eq. 12пјҡ
L7 P5 J M) }4 U6 |- K П„(s)=вҲ’[Is2+dMs]ql(s)+[C(s)+О»(s)]П„вҲ—(s)вҲ’(Is2+dMs+kbC(s))в–і(s);\tau(s)=-[Is^{2}+d_{M}s]q_{l}(s)+[C(s)+\lambda(s)]\tau^{\ast}(s)-(Is^{2}+d_{M}s+k_{b}C(s))\triangle(s); + o: L. B% Z1 h
4. ж•ҙзҗҶ
7 Z5 u. C; e) J1 J9 H, n е°ҶEq. 12ж•ҙзҗҶеҰӮдёӢеҫ—еҲ°Eq. 13пјҡ $ Z+ n: A* G9 S1 [+ k) C5 h( V
П„(s)=(kb+dgls)[в–іП„вҲ—(s)П„вҲ—(s)+в–іql(s)ql(s)];whereв–іП„вҲ—(s)=в–і(s)П„вҲ—(s)=Kds+Kp+О»(s)Is2+Dв–іs+Kв–і;в–іql(s)=в–і(s)ql(s)=вҲ’(Is2+dMs)Is2+Dв–іs+Kв–і;andDв–і=kbKd+dM+dgl;Kв–і=kb(Kp+1);\tau(s)=(k_{b}+d_{gl}s)[\triangle_{\tau^{\ast}}(s)\tau^{\ast}(s)+\triangle_{ql}(s)q_{l}(s)]; \\where \\\triangle_{\tau^{\ast}}(s) = \frac{\triangle(s)}{\tau^{\ast}(s)}= \frac{K_{d}s+K_{p}+\lambda(s)}{Is^{2}+D_{\triangle}s+K_{\triangle}}; \\\triangle_{ql}(s)=\frac{\triangle(s)}{q_{l}(s)}=\frac{-(Is^{2}+d_{M}s)}{Is^{2}+D_{\triangle}s+K_{\triangle}}; \\and \\D_{\triangle}=k_{b}K_{d}+d_{M}+d_{gl}; \\K_{\triangle}=k_{b}(K_{p}+1);
! d$ a+ g4 x$ S8 E. \ Eq. 13з®—жҳҜSEAзҡ„еҠӣзҹ©жұӮеҜјдёӢпјҢйҖҡиҝҮжӢүжҷ®жӢүж–ҜеҸҳжҚўз»“и®әжҖ§зҡ„е…¬ејҸпјҢеҰӮжһңдёҚйңҖиҰҒзҹҘйҒ“зӣёеә”зҡ„жҺЁеҜјиҝҮзЁӢпјҢеҸҜд»ҘзӣҙжҺҘжӢҝеҺ»дҪҝз”ЁгҖӮе…¶еҜ№дәҺеҲҶжһҗSEAй©ұеҠЁеҷЁзҡ„еҠӣжҺ§жҖ§иғҪиҮіе…ійҮҚиҰҒвҖ”вҖ”еҢ…жӢ¬йҖҸжҳҺеәҰпјҲTransparencyпјүе’ҢеҠӣзҹ©иҝҪиёӘиғҪеҠӣпјҲTorque Trackingпјү. % k" n) I$ F$ J: U4 s
пјҲжүҖжңүзҡ„е…¬ејҸйғҪжҳҜжҲ‘еңЁзҹҘд№ҺзҪ‘йЎөдёҠLatexдёҖдёӘдёҖдёӘж•ІеҮәжқҘзҡ„пјҢдёҚдҝқиҜҒе…ЁйғЁжӯЈзЎ®гҖӮеҰӮжһңзңҹзҡ„жңүе°ҸдјҷдјҙиғҪеӨҹзңӢе®ҢжүҖжңүе…¬ејҸпјҢз»ҷжҲ‘зә жӯЈеҮәй”ҷиҜҜпјҢжҲ‘йқһеёёејҖеҝғе’Ңж„ҹжҝҖпјҒпјү ( n5 E7 y" y# m" L% [" w
еҜ№дәҺSEAй©ұеҠЁеҷЁзЎ¬д»¶з»“жһ„дёҚжҳҜеҫҲдәҶи§Јзҡ„е°ҸдјҷдјҙпјҢйҷ„дёҠжҲ‘д»ҘеүҚеҶҷиҝҮзҡ„д»Ӣз»Қй“ҫжҺҘпјҡ : X! @8 a' u4 t# ?/ k
дёҖз§ҚеёҰеҠӣзҹ©гҖҒдҪҚзҪ®дј ж„ҹеҷЁзҡ„зҙ§еҮ‘дәәеһӢжңәеҷЁдәәSEAй©ұеҠЁеҷЁпјҲеёҰи°җжіўеҮҸйҖҹеҷЁпјүжңәжў°и®ҫи®Ўж–№жЎҲ 3 X: q1 \" H( i" B% \# U
Strain Gauge or Encoder Based? е…ідәҺSEAеҠӣзҹ©жөӢйҮҸеҺҹзҗҶйҖүжӢ©зҡ„жө…и°Ҳ
2 E+ ]4 j6 k: G7 R# ^ еҸӮиҖғж–ҮзҢ®пјҡRoozing, Wesley, JГ¶rn Malzahn, Navvab Kashiri, Darwin G. Caldwell, and Nikos G. Tsagarakis. "On the Stiffness Selection for Torque-Controlled Series-Elastic Actuators." IEEE Robotics and Automation Letters 2, no. 4 (2017): 2255-2262.Pratt, Gill A., and Matthew M. Williamson. "Series elastic actuators." In Intelligent Robots and Systems 95.Human Robot Interaction and Cooperative Robots, Proceedings. 1995 IEEE/RSJ International Conference on, vol. 1, pp. 399-406. IEEE, 1995.
' G: P( {5 K# P
8 }6 [# Q/ b+ g$ ?0 S- U7 J" N9 L. R/ u0 m" O9 Z; G
, E# }# H5 Z% r2 w' T1 c* a+ w n! ^3 w' K7 t& |8 i
|