|
* k1 ?& s5 h: j' P6 g5 R 
( x" F* S8 d3 r3 k% W" l! q [摘 要]水深测量是指测定水底点至水面的高度和点的平面位置的工作。是海道测量和海底地形测量的中心环节,目的是为船舶航行提供航道深度和确定航行障碍物的位置、深度和性质。本文首先写其内容,随后对海洋水深测量产生误差的因素进行了分析,最后对如何提高海洋水深测量精准度提出了方法措施,希望能促进水深测量的发展。
/ w6 l& {$ M4 x$ K0 @, v- K5 z 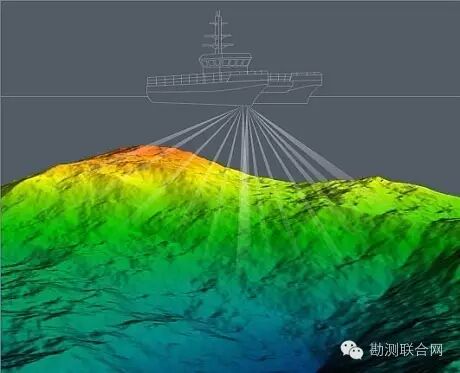
5 l$ [3 x' o; P4 E
海洋测绘,对于海上航行的保证以及海洋事业的发展具有重要作用,而海洋测绘的研究成果,不仅体现在海洋事业的发展,还体现在国民经济建设、国防建设以及科学研究的方方面面。对于我国来说,从新中国的成立至今,海洋测绘的发展也从弱走向强,从小做到大,并且有了骄人的成绩。而海洋测绘成果体现在那一万四千米的岛屿岸线1 800km的大陆岸线以及300多万平方千米和6500多个岛屿的管辖海域。对于我国的海洋测绘事业而言,海军的测绘力量开创时间最早,随着海洋测绘事业的发展,我国成立了国家海洋局,国家海洋局对我国的海洋进行调查、规划以及实施,使得海洋测绘事业有了蓬勃的发展。下文将对基于海洋测绘水深测量的相关内容进行论述。
! I1 q' h1 }% o) `5 e } 一、水深测量的内容# I. W$ t3 E8 g- W/ A
水深测量的内容主要包括以下两方面的内容:
2 K+ L; S P1 M5 ` 1.测深点的深度测量
7 R( `' S' F1 Q5 R) f1 w' x- ~ 测量水深所使用的工具和仪器一般有测深杆、测深锤和测深仪等。为连续测得水深,必须选择适当的测深线间隔和方向。测深线间隔一般取为图上 1-1.5厘米,测点间距一般为图0.5-0.7厘米。测得水深后,必须进行水位改正。就是把在瞬时水面上测得的深度归算到由深度基准面起算的深度。 # }% J. T- t; g6 _- ^& W3 f3 }
2.测深点的定位 ) t8 y6 t) h. J+ K* k
在水深测量工作中,还要精确地测定深度点的平面位置,这项工作简称为定位。用测深仪测深时,深度点的平面位置是换能器的平面位置;用测深杆、水砣测深时,深度点的平面位置是测深杆、测深杆或水砣绳与水面垂直相交时的平面位置。
8 _ @; c* y" ~$ C5 ^ 二、海洋测绘水深测量误差的影响因素3 ]5 G+ P5 `5 {) i7 `: Z) Q
水深测量误差主要有仪器误差、声速误差、潮位观测因素、船速因素和船只因素等。 : l7 ?, S% h& T4 H
(1)仪器误差指的是在进行测量的过程中,由于测量仪器的性能而产生的误差或者因装配探测仪等相关设备所导致的误差。因为探测仪自身性能产生的误差指的是在使用探测仪的过程中,或者在多次使用探测仪的过程中,因为电压电池的换挡和降低、元器件老化等因素导致的转速和声速的变化,进而对水深测量的精度产生一定的影响。同时,因为型号不同的探测仪和使用程度不同的探测仪,对反射声波接受的敏捷程度也有所不同,在和水草、杂物、泥浆等介质进行碰撞的过程中,会产生虚假的水深,对测量的真实性和精度产生了影响。 ' V# ^/ ~' d. Q& H l
(2)声速误差指的是走航式水深测量依据声波对深度进行测量,因为声波在水中传播的速度会对水深精度的测量产生一定的影响,在进行测探之前,应该对测深器的数值进行测定,因为设置声速值的水平会对测深数据的精确性产生较大的影响,一旦出现了声速值设置不合适的问题,很容易使测深的结果变浅或者变深,如果没有通过其它的方式进行检验,很难对系统误差进行发掘。
: n; m1 K9 s1 ]. [# O2 ^9 y: i- G (3)潮位观测误差指的是因为水深测量得到的结果是通过理论上该地区最低潮位的数值,因此,应该将外业测量的结果计算到最低潮位面上,因此,在对潮位进行测量的准确性会对水深测量的精度产生影响。
3 R* m$ Z5 }# g- {, q* _5 l9 ^ (4)船只因素也会对测量的精度产生一定的影响,在对水深地形进行测量的过程中,船型和船的大小会对测量工作产生很大的影响。如果船只太大,在工作的时候很容易搁浅,而且因为船只的吃水太深,对浅水带附近的数据无法有效的测量。如果船只太长,在运行过程中的灵活性会受到一定的影响,很难按照预先设定的方式进行测量。如果船只太短,船体进行回旋的半径很小,但是在拐弯和掉头的过程中,有很大的灵活性。 * N4 h+ j: F, V* A6 t
三、海洋测绘水深测量相关技术
) g( V$ q+ H, e 现如今常用于我国海洋测绘工作中的传统工作方法包括:罗盘定位与六分仪、测深杆、测深绳、测深铅鱼等,这些传统的工作方法测量精确度较低且效率不高,只能进行粗略的海图绘制,难以满足高要求的探测工作的进行。为了解决此类问题,在遥感探测、声波探测、卫星地位和激光探测等科学技术不断成熟的今天,它们将逐步被应用于海洋测绘过程中,随着这些技术的使用,海洋测绘技术也将逐渐向高效率、高精度、高现代化迈进。
- F8 N6 q {. q7 I0 ? D) N 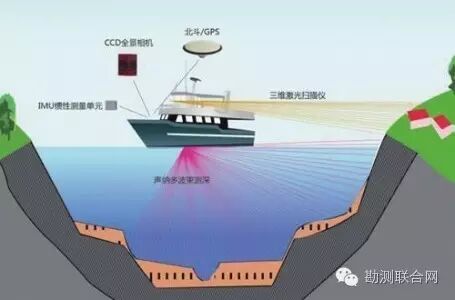
- f( K5 Y% e( e& x 四、提高水深测量精准度的措施$ s# p+ H7 A& g& @6 _' M5 X+ G
为了最大限度的提高测量结果的精确性,测量前,先要确定测区范围和测图比例尺,设计图幅,准备图板和展绘控制点,布设测深线和验潮站,以及确定验流点和水文站的位置。测量时,测量船沿预定测深线连续测深,并按一定间隔进行定位,同时进行水位观测。测量中要确定礁石、沉船等各种航行障碍物的准确位置,探清最浅水深及其延伸范围。 $ o8 l0 g' x7 O3 \
1.修正测量误差
+ P9 L0 _; { X( R3 y/ H$ p% n; N 对于采样速率及延迟造成的误差,可以在延迟校正中加以修正,修正量可在斜坡上往返测量结果计算得到,也可以采用以往的经验数据。船体摇摆姿态和动态吃水的修正,可用电磁式姿态仪修正船的姿态,修正包括高程的修正和位置的修正。船的航向、纵摆和横摆等参数都可以通过姿态仪输出,借助专用的测量软件可以修正这些参数。动态吃水改正是船体自重下沉加上测深船的静态吃水深度和颠簸的总和,得到的是一个不定值,往往都是平均值。 ; B$ w( F& e$ B; L1 I8 L7 `1 F
2.提高GPS在海洋测绘中的精度 ; t, u; I9 m) I' r4 y& c
GPS定位系统在大地高的测量中应用较早,且测量结果较准确,但在将大地高转化为海图高的精确度上却并不高。由于海洋理论深度基准面具有跳跃变化的不稳定特点,因此,将大地高作为无缝垂直参考基准应用水对水深的测量,还需进一步加强对于数据处理准确性的研究,以做到通过大地高的测量,能对海图高的数值有比较准确的测定,尤其在我国的远海领域,应加大对GPS精确使用范围并加快相应技术研究,以不断促进海洋测绘技术的提高。
1 W1 f# ]- V2 U% O 3.加快提高测深技术
* b; R. V+ q6 y1 a3 s* T& C 在水深测量上,海洋测绘虽然在近些年的发展中取得了很大进展,但由于受先进的测量仪器价格昂贵、海洋测绘较之陆地测绘起步晚、在技术上相对较弱等原因的影响,在当前我国的水深测绘中,仍然主要使用单波束测深仪,对于多波束测深仪的研制还有待提高,如果主要依靠单波束测深仪,将会降低我国测深效率以及测量结果的精准性,对于我国海洋测绘业的发展是不利的。 / ]* {1 W3 P) \; b: G
4.建立完整的GPS无验潮海洋深度测量作业模式 / E* O) s, G; {/ H: _; \
在海洋测深过程中,为解决回声测深仪波束角效应使记录的测深图像失真问题,提出了波束角效应的改进模型及其改正算法。针对多波束测深数据集,采用改进的距离反比权重算法和多细节层次模型技术来建立海底数字地形模型(DTM)。
( D. w) [% Q2 E K; T' m 5.加快网络化信息服务系统建设,重视测绘人才的培养
0 f. W0 i$ r" d( ]1 B% T U 海洋测绘信息目前还是主要在海洋测绘、科研、管理等部门建立的局域网上实现信息共享,并没有实现社会化应用,应尝试在当前局域网的基础上,与各级海事部门实现联网,通过与国家公共信息网站的链接,实现海事测绘公共服务信息的大众化使用,并尽快建立起信息服务系统,使海洋测绘信息能为与海洋打交道的各行业人员提供帮助。
+ p4 q& L2 G) s z 结语
, n0 H8 A5 v0 ? 综上所述,对于海水测量的水深误差,要采取针对性的对策,对测量误差进行修正,当然,在这方面我们还需要进一步的研究和探讨,随着技术的不断发展和完善,水深测量也能发挥其最大的作用。
1 b* S, x, d6 R- W; Z* @9 j 文/《中国科技博览》, 2015(36):307-307
* k$ s% o2 G! ` D* b- c 整理:陈柳林 8 g$ _( e+ M" r/ \1 v
审核:高冲 1 ^8 q: s2 S5 B+ P7 }8 _
更多阅读 $ a' h1 S# L; X
测绘数据常见误差类型及处理方法 / b# _% z0 E/ Q5 o1 [; M
区域精化似大地水准面成果应用分析研究
2 A0 \+ @0 z; I1 @( J4 ^3 a$ D( _ 地下管线探测常遇问题的探讨
# x- F# B1 _7 a' ^" q- w8 }8 d 建筑物变形测量的方法研究 % y2 `$ u! ?- r& G* y/ A6 A
论沉降观测及精度的提高
8 o% r, \! j8 J$ Z! O; } 多波束系统在海洋工程勘察中的应用 / T4 O5 [7 w' X' H+ f C
大地测量坐标系统转换问题分析 ! D- A5 {9 W2 `$ c: X$ H
 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) 
% \( t- r* r2 k# I/ x ---------------- 推 广 --------------- 7 _* e0 l* H' l/ V# s, K

" b, E/ F# S; R+ b5 T. _. D! r9 X5 d1 q4 x: \
( K# ^7 W2 |; Q2 @3 L& B: g
9 Y h: }; G' p1 X8 x
2 j. F* R6 n) J/ D, y
| 

