& u: n' D$ X: d. N- I) C$ m2 d
作者 | 德新
7 d6 s- _ L/ s7 ^. W
编辑 | 王博
! [# x {4 m. H) m) p' R
 2 [/ ?, z. L# R: r1 b
2 [/ ?, z. L# R: r1 b 1024,是程序员的节日。
# P" H+ i/ a# X+ |7 x
但在汽车行业,因为小鹏,这几年1024已经逐渐变成汽车科技的秀场。
4 C( _, Z! I7 [- T; ^ 小鹏的1024科技日始于2019年。
: a' d' b- U7 `* N1 @0 o 2020年,智能驾驶XPILOT和智能座舱XmartOS成为小鹏最重要的两个技术标签。
, S' g6 R! b+ J3 p- B
2021年,高速NGP横空出世仍让人记忆犹新。高速NGP流畅、本土化的体验,一下就刷新了大家对辅助驾驶技术的认知,也很大程度加速了这个行业的(发展)内卷。
5 \ {# M/ }; N. L! l- d( P 现在的1024,既是观察小鹏科技储备的绝佳窗口,也是衡量国内汽车科技发展水平的一个风向标。
* E" C+ K& g \! X G4 J
作为一家以「智能科技」为核心卖点的车企,小鹏在2022年的布局已经大幅超出了汽车本身。小鹏所展示的黑科技,既有大家熟悉的智能驾驶、智能座舱,也有更面向未来的智能机器人甚至飞行汽车。
0 h% P3 t' F+ R* e! b/ c 作为一家头部的新势力,硬科技车企的代表,小鹏对未来出行是怎么思考的?
/ T [& ^2 _5 F0 s1 K3 o 1.城市NGP首发,比高速NGP难100倍
2 k+ {& s& q$ ]" Z; M
首先聊聊备受期待的城市NGP。
8 h* m" W* E2 k I% w 高速NGP - 城市NGP - 全场景辅助驾驶(XNGP)- 全自动驾驶,这是小鹏看到的智能驾驶的演进路径。
- D4 K ]0 E" s, y( O8 n 用小鹏自动驾驶副总裁吴新宙的话说,「单场景辅助驾驶是上半场,全场景辅助驾驶是下半场。」
; _/ R! {7 x0 \+ I* Y4 F1 U
 . X0 G9 T' U! h5 Z- v. ^1 \
. X0 G9 T' U! h5 Z- v. ^1 \ 城市NGP是开启下半场竞争的前奏,我认为也是辅助驾驶发展的一个拐点。
9 y+ L; _9 a$ _
此前,XEV研究所做了不少车主调研,很多新能源车主之所以不用辅助驾驶,是因为缺乏高速路的使用场景,而城区路又用不了。小鹏给了更精细的数据:用户的用车时长中,90%是在城市道路;从频率上看,用户100%每天都会经过城市道路,但只有25%的用户会经过高速路。
5 K: h, _8 m) z" D1 j
城市NGP比高速NGP要难上百倍。小鹏的实操经验是:相比高速NGP,城市NGP的代码量提升至6倍,感知模型数量提升至4 倍,预测/规划/控制相关的代码量是88倍...
$ w; _, V* l- C; B( g; [5 P! P$ M
所以在这个过程中,也有人劝小鹏的自动驾驶团队,为什么要去做这么难的城市场景,而不是做一些难度更低、收益更快的场景?吴新宙表达的是,「这是难且正确的事」。
/ _3 U$ d* ]6 C. Y, K
城市场景作为最高频刚需的场景,会很大程度提升用户对辅助驾驶功能的感知,拉动用户对辅助驾驶软件的付费意愿,同时拉大小鹏作为领先企业和其他车企的差距。
( p6 V) y* o' F( `
像很多新技术一样,从不好用到好用,到产生依赖,存在一个临界点,辅助驾驶也是如此。
& n# |+ N0 T( Z
何小鹏在初体验城市NGP早期版本时,觉得系统就是一个新手司机,随时要准备接管;但到10月份体验第4个版本时,已经觉得是一个开车水平强一些的司机。他认为随着技术打磨,用户从不信任到依赖的这个转折点快要到了。
3 M) U# l. p) O5 V6 S
从技术层面上,城市NGP主要解决了两方面的问题:
0 q" i- [, U B( X" c: e
) `" y) Z& [) b5 N4 ^/ n0 t6 j# Z8 T 第一,应对由城市场景本身的复杂特征带来的挑战,比如车辆、行人密集且会出现大量相互遮挡,并且目标的运动轨迹更加不规则和多元,静态的道路环境也在持续发生变化。
5 I. y5 }) t( Q$ U9 I; _+ f
4 _+ ]7 G2 P T
具体而言,小鹏从视觉感知、传感器融合、行为预测、规划控制等方向上做了大量的工作。
* X+ X# z( g5 l) t0 H 比如针对密集场景的物体检测,放弃了原NGP的物体检测神经网络架构,重新搭了一套架构;启用业界最新的单目3D检测网络,直接通过单目RGB相机来预测物体大小、朝向、距离和速度;设计新的车辆转向灯识别网络;利用数据闭环,解决各种长尾下的红绿灯识别问题,等等。
! a# |7 g/ `3 G f% r' N2 |2 T' ?: g4 n6 [( r0 @" T+ ?
第二,要在有限的资源上,将功能产品化兑现给用户。P5上只有30 Tops算力的Xavier计算平台,相比后来的OrinX资源非常有限,这要求有强大的工程化能力,包括模型优化和部署等等。
5 p J/ q U' b) |) {0 p
8 Z; g+ Y+ }! B
目前业界在一块Xavier上实现城市NGP并交付的车企,只有小鹏一家。据说这个事情,曾有友商多次跟小鹏内部求证,是只用了一块,而不是两块或者更多。这也侧面反映了工程化难度之大。
! S# C0 s( |" v! i$ B
目前,城市NGP已经在P5上开始全量推送,因为高精地图的原因,广州是可以开启城市NGP的首发站,接下来将是深圳和上海。
; S& D" C" S6 V5 v0 _3 n 在已推送城市NGP的用户车辆上, 城市NGP里程渗透率达到约63%,城市NGP下的通行效率接近人类驾驶员的90%,每百公里接管次数0.6次。
. y9 ^- q2 k- E1 E8 W
城市NGP百公里0.6次接管什么概念呢?假设你每天通勤60公里,5天300公里,那在一周的工作日内,你的周平均行驶接管次数不超过2次。据我所知,这个数据甚至好于一些Robotaxi公司在测试区的接管数据。
4 [2 w- W, ]( @' q. r 2.XNGP,全场景能力是辅助驾驶竞争的下半场
M6 u0 F8 \: y B* @
城市NGP首发量产,是小鹏自动驾驶技术体系的冰山一角。
1 J/ B: r0 ?. K+ T% M# j
 * O7 ^$ R# x! F; K' |# {$ _2 o
* O7 ^$ R# x! F; K' |# {$ _2 o
2023 - 2025年,小鹏这个阶段的主要目标是攻克全场景辅助驾驶。
{$ G( t7 J- X 全场景辅助驾驶的精髓,我认为是用一个很强的视觉感知底子作为主干,减少对高精地图的依赖,从而做到「有图体验完美,没图体验也能一流」。
# y& j" e0 E+ L 为什么强调减少对高精地图的依赖,因为高精地图的许可和更新都很难。
- ?! X2 R, y! d! P
包括城市NGP在内,国内头部车企/自动驾驶公司的城市NOA落地,目前多少都受到高精地图审批的影响。何小鹏说,原以为城市NGP在明年第一季度可以大范围铺开,实际上只规划了几个城市。
/ x7 E. L6 Z& }) `6 A/ [
为了摆脱对高精地图的依赖(或者在没有图的情况下依然能做到完美表现),小鹏开发了新的感知模型架构XNet,XNet以多相机、多帧的图像作为输入,输出的是动态和静态目标的感知结果。
8 ?; h# `& o9 X) x3 X& e/ q) J4 n+ N 静态目标的集合,相当于是实时的高精度地图;
$ k+ }; A9 C" l6 t( c3 z- n1 M
针对动态目标,因为网络具有360°的视角,系统的博弈能力会更强,变道成功率也会更高。
5 _: _1 J) Q+ K9 m: W! z( G 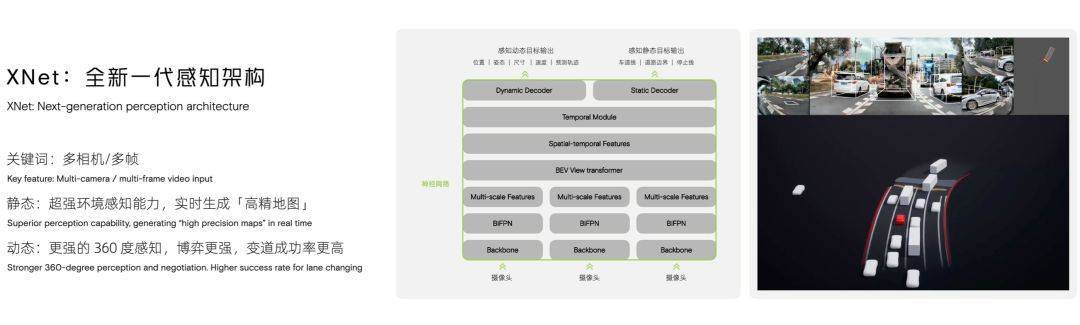 . }9 [" c9 i+ E$ G) w
. }9 [" c9 i+ E$ G) w
这样一个大模型,需要大数据投喂,也需要大算力来训练和部署。
( ]% { a* `1 ?6 H, T6 ]& I. W+ Y5 v 根据小鹏测算,XNet训练数据的数据标注工作,大概需要50 - 100万段的短视频,手动标注需要2000个人年(1000人团队2年时间)来完成;用单个服务器来训练需要276天;模型训练完,直接部署到车端的话,一个Orin-X还不够,需要1.22个Orin-X。
3 ]9 M3 ^; F+ b, m$ G
为此,小鹏对应开发了全自动标注系统,将2000人年压缩到了16.7天,小鹏今年新建的自动驾驶智算中心「扶摇」运用在训练上,可以把模型训练的时间压缩602倍;再通过对Transformer算子的重构,XNet的模型部署最后占用了Orin-X 9%的算力就完成了。
/ `$ t3 L$ f6 f/ F9 A8 C
这段太绕了是吧?简单来说,就是场景很难,算法复杂,极耗资源。怎样用更少的资源在短时间内做出好的效果,考验工程能力。XNet就恰好反映了小鹏在自动驾驶上全面系统的工程能力。
1 d8 A+ b2 H' m, Z* Y
其实到了2022年,从单点功能上,比如5家车企的LCC,已经较难区分出很大的差别。辅助驾驶的能力PK,更多考验的是对困难复杂场景,甚至罕见场景的应对能力,而这部分能力的增长需要强大的数据闭环。
% [, `& G% b7 y5 ^
数据闭环有4个关键环节,采集 - 标注 - 训练 - 部署,后3个环节在上面都有提到。
! ^; u2 \: G6 b! G
采集环节,小鹏目前有超过10万辆带XPILOT系统的车型。吴新宙透露,小鹏已经开发了超过300个触发器,每周可以根据特定的场景需求进行专门的数据采集。
" @: z* w" O7 }% ~
城区辅助驾驶开发的精髓是通过神经网络来构建复杂的代码,因为人工编写在海量的复杂场景面前,很快会到达瓶颈。因此核心的竞争是数据闭环的能力和效率。
' Y. Z, J6 D0 F; {9 B5 P! N) Z 在这点上,小鹏无论从钱(建立智算中心)、人(团队规模)、车队(量产车数量),应该都是国内目前走得最快,步子迈得最大的公司。辅助驾驶的上半场靠精英人才投入和工程积累,下半场在上半场基础上,拼的更多的是系统能力和效率。
4 b" X5 L* [7 c: l9 \8 d- v 哦,对了。
( H' i7 K" Q+ ~ A D 还有One more thing,小鹏计划在明年和后年开始,从广州起步来部署Robotaxi,大概率会基于G9开始投放,希望以Robotaxi和辅助驾驶两条线,形成功能和数据的互补。
* P3 d" | p0 |7 F% h8 N 3.自研语音基础能力,再次刷新座舱交互的想象力
: J- }; _* i! ^; p& h
辅助驾驶和智能座舱,是小鹏智能化标签的左膀右臂。
1 M* n- F K( @& U 前两年P7的座舱,已经刷新了行业的座舱语音交互标准。就算到今年,小鹏在P7上提出的全场景语音交互、连续对话、可见即可说的能力,还是行业内其他车企旗舰车型追求的功能标准。
1 U; s1 Q! _& C- p5 v P7的语音能力,定义了语音作为智能汽车交互入口的范本。从这点上来说,我个人认为它的独特性,甚至大于同时期XPILOT在智驾领域的突破。
% W% a3 w& p+ e% r8 V7 i. h  g" f$ Y5 Y0 u( T& \- \* d2 ~
g" f$ Y5 Y0 u( T& \- \* d2 ~ 今年,小鹏推出了全场景语音2.0体系。简单来说,就是多人在车内对话的状态,越来越接近正常对话的状态,而不需要人来迁就机器。
0 D5 x2 A2 D& U! `2 i4 G
比如全时在线功能,不需要唤醒;一句话最多支持4条指令的同时执行;MINO多音区功能,相当于语音助手有多个分身,车内多人各说各的,同时反馈和执行。从响应、执行速度上,2.0版本也有不少指标刷新了行业最快成绩。
, J& d2 m/ ^; I: p
座舱语音交互能力还能持续压榨,背后除了8155带来的水涨船高之外,小鹏已经开始深入语音技术的底层,包括:声学信号处理、本地语音识别、在线语音识别等等。这些典型语音基础能力 ,这是一般车企不会涉足的领域。
/ h- i( C' M: S5 I9 _2 f- Z
小鹏的第二代语音架构全栈自研,再度说明,小鹏对语音的探索,已经进入到非常前沿的地带。第三方供应商在技术方案和迭代速度上,难以满足需求。小鹏内部认为,自研方案的先进性更高,资源使用和数据成本都更低,也有助于拉开差距,形成独特的产品竞争力。
/ J- K2 E1 c/ @. Z% ~ 另外,小鹏的海外车型,也会采用自研的语音架构。
0 D% q! p+ v6 e8 v$ G' ~
4.智能机器人离家用更近一步,飞行汽车试验车成功首飞
' ]( d% ?7 |& G6 ]0 Z
与特斯拉类似,小鹏也在通过小鹏鹏行造机器人,甚至小鹏启动的时间点更早,6年前就开始了。
) [' T! C. O, |- S8 h, Z* _. V; V
这届1024上,第二代智能机器人亮相:
$ o* o# S1 f/ u$ Y
+ e2 y, O7 r$ G9 `. l- i2 a: M 头部集成了AR投影,是对机器人交互形式的探索;
2 [; M; L% A0 L. q- P1 [ 足底使用“EVA超临界发泡”及耐磨橡胶,缓震、静音与耐磨性能提升;
" ~. w3 I, r1 W x" `3 g/ o 颈部等区域使用新型弹性织物与液态硅胶材料,解决多自由度运动的设计问题,且耐冲击、耐刮擦;
Q( H1 c$ E# @% [5 M 尾部增加了机械臂,可执行更多的功能;
5 l$ A0 A6 L& m' F8 ^ 算力平台,采用与高端智能汽车同级别的平台;
" ]- ~! U; p8 \& `3 M/ U 电池系统,采用车规级电池系统,BMS和电池Pack 一体化设计,更加紧凑、安全;
6 v$ X, m5 g2 }' m
热管理系统智能化,大幅提升智能机器人极限性能。
1 f4 d ~4 X) R& J4 \
4 ?; y6 r" b7 X 据何小鹏介绍,目前围绕智能机器人的开发,核心是在打磨几方面的能力:行动的静谧性;在狭窄环境下的避障能力;以及机械臂的多场景应用。
8 p3 A; D) g3 a, M, p( A 最后,继10月份完成迪拜海外首飞之后,小鹏汇天的飞行汽车也在这届1024活动上进行了亮相,内部研发代号为X3。
& y3 S) c, F Z/ A: F) h
在去年发布的飞行汽车概念的基础上,X3改变了构型,具备机臂折叠收纳系统,可进行陆行和飞行模式的切换。
6 T5 \: j- O4 \$ b
在机臂折叠收纳状态,它的尺寸和常规汽车相当,能够在开放道路自由行驶;在法规、环境允许的条件下,垂直起降,飞行跨越拥堵、障碍、河流等,满足人们短距离低空出行的需求。
5 L8 {; V2 A' p0 q; c 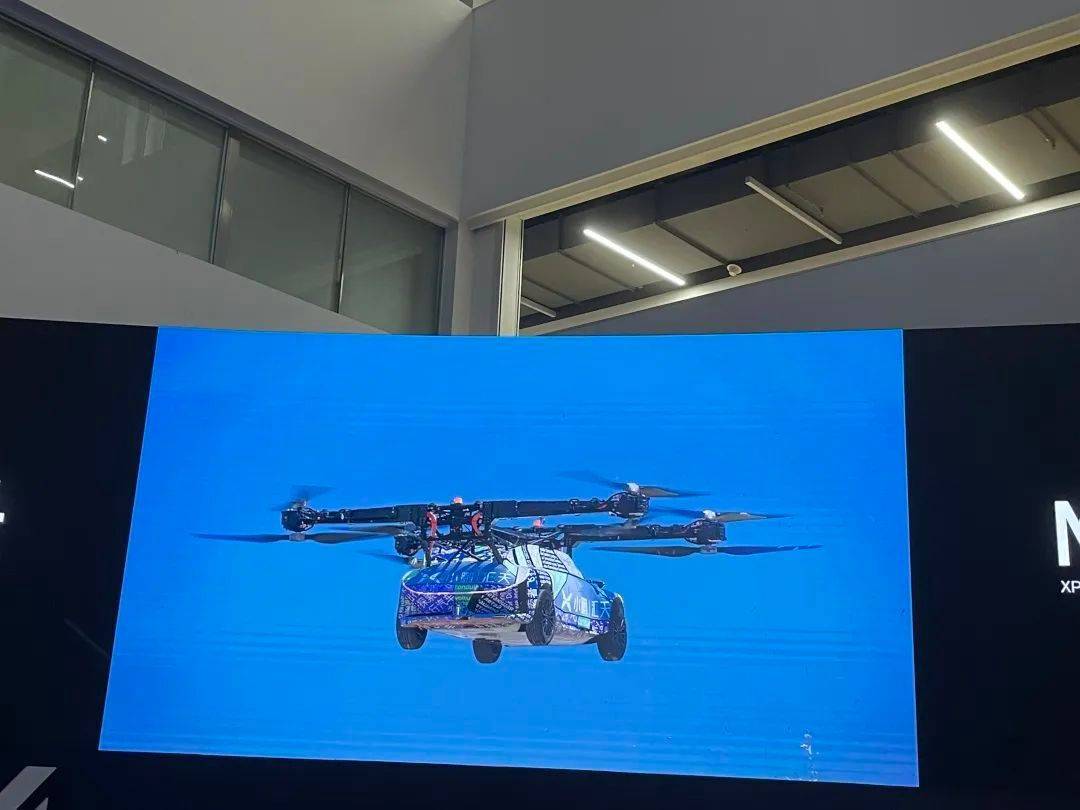 $ w" o6 k$ x1 W, ?. C
$ w" o6 k$ x1 W, ?. C X3的试验车整备质量接近2吨。目前基于X3,汇天的飞行汽车已完成试验样车首飞。汇天的目标是在X3的基础上实现量产。小鹏之前已经宣布,希望在2024年推出量产飞行汽车,成本不高于100万元。
8 s. j" f1 x1 ]) o# C: C
在X3上,汇天完成飞行汽车量产的两大挑战:
" l0 E( ^6 w/ d+ ~9 p! u 第一是飞行控制。在螺旋桨直径接近 4 米的情况下, 对转动惯量的控制和响应速度要求很高;
3 x4 N) x, s4 \9 S ~, q! l2 P
其次,动力系统要让2吨级的车辆起飞,所需动力是地面行驶的15倍。电池放电功率密度、能量密度要远超目前汽车行业平均水平,还需要更好的热管理系统,并考虑动力冗余需求。
/ g$ H# B7 T* {; q3 V& A2 ? 何小鹏也很坦诚,X3的电池目前可以支撑车辆行驶几百公里,但飞行的话,只能支撑几十公里。
. O" {! P: E9 ?, A$ z+ C# E
总结:
. V, d) s0 _# v) q$ X9 J- \ 我在小鹏广州总部的现场看完了这场1024,这场活动一点不像车企的技术日,倒非常像GoogleX的科技展示。
6 V* Y! e# X9 B% ~2 V. V
整个发布会前半场非常硬核,后半场很fancy。很多时候,大家的注意力容易被后半部分那些炫目的概念吸引,甚至网上有声音质疑小鹏布局太多,智能机器人和飞行汽车的商业化路径不清晰。
; ^" B8 J# L7 |8 x
但从整个时长分配来说,小鹏是非常务实的。75分钟的发布会,智驾部分占了50分钟。当下与未来,诗和远方,边界非常清晰。
9 z/ _0 A" z, h 无论是城市NGP,还是飞行汽车,小鹏在前沿科技上的探索,有很大一部分已经进入到前人未至的无人区。这意味着,市场上没有同类竞品,无从对标,也没有供应商具有成熟经验,其中有大量全新的定义和自研工作,极度考验一家车企对未来的判断、执行力和交付能力。
+ R* g/ c! G6 {. p3 B" o* _ 小鹏过去8年在硬核技术上的积累,已经构建起一个完善的科技体系,在不同的产品上,人工智能、人机交互、动力系统等领域有相当一部分可以复用,甚至可以通过产品之间的反哺,形成独特的领先性。
9 {$ D2 S0 H" v: V
印象最深刻的是,何小鹏和吴新宙,都提到了做「难且正确的事」,打造「让用户骄傲的科技产品」。
: Q; u1 U! c; i3 z 辅助驾驶、智能座舱、智能机器人和飞行汽车,是否足够令人兴奋、让人骄傲?现场的车主们已经回应了一个狂热的「YES」。
) R* s( f: b5 v! b I& z, j 



 * O7 ^$ R# x! F; K' |# {$ _2 o
* O7 ^$ R# x! F; K' |# {$ _2 o
 . }9 [" c9 i+ E$ G) w
. }9 [" c9 i+ E$ G) w


