|
: z3 I0 m3 @; s 以下文章来源于溪流之海洋人生 ,作者王启等
& \' e" l' k, v+ F. c- ?5 W( l 
/ d& G& U' k) z& h" U& L, S
溪流之海洋人生
* L5 M0 R) M' c1 w' R( X 开启新征程,试图用自己对海洋和测绘产业的理解和思考,助推行业健康、有序发展,为中华民族的伟大复兴而尽自身的力量。我们的口号永远是:用专业精神创造价值,用人文关怀引发共鸣。 1 T# X# F+ _* c8 n7 x L
↑ 点击上方「中国测绘学会」
% k- r E( i2 G 可快速关注我们 : L1 {1 o% H% c+ q3 R' f
引言 * p: C* X5 t0 Y8 s6 ~: t
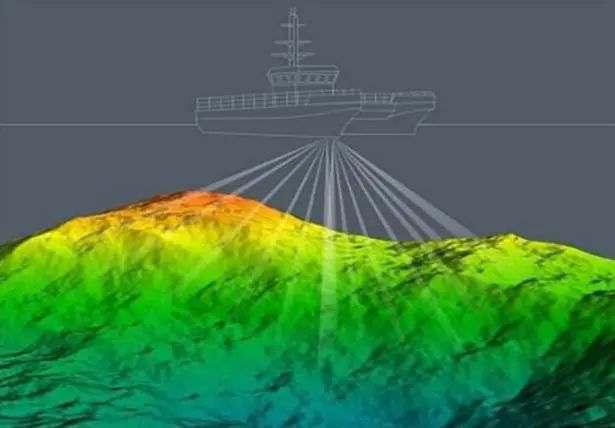
多波束测深可以获取目标调查区的水深数据、海底地形地貌特征等,多波束测深是一种常规的海洋勘探方法,也是海洋地质调查前期必不可少的重要手段,因其作业效率高、对海底可进行全覆盖测量,在海洋地质调查中发挥着不可替代的作用。目前,多波束测深在海岸带等浅水环境调查中的应用越来越广泛,主要用于查明近海海底地形地貌特征。高质量的多波束成果资料可以为三维地形地貌模型的建立、开展海陆统筹地形地貌分析提供高质量的地形地貌资料,为沿海桥梁、海底隧道、海底电缆、海底石油管道铺设等工程建设提供数据支撑,为沿海地区资源开发、环境保护和潜在地质灾害评价等提供重要科学依据。 2 |) |8 X. S. c- Y3 o! }. \
) a: V4 C. r4 t' a% x0 L
多波束成果资料的质量不仅取决于换能器的测深精度,还取决于姿态、定位、潮汐、声速以及换能器吃水等各种辅助参数的测量精度。与深水资料采集相比,浅水多波束资料采集所用调查船一般为体型较小的渔船或交通艇,船体易受风、浪、涌、流的影响,较小的风浪使船体产生很大的摇摆幅度,换能器的姿态不断发生变化,影响波束的发射和接收。
1 E/ `: s7 N& ^2 z7 b 近岸海域船只往来比较频繁,给多波束原始资料带来很多噪音干扰。海岸带水质情况比较复杂,由于水浅、海水温度早晚变化大,潮汐和声速变化对原始资料产生重要影响,给多波束后处理工作带来很大困难。本文主要根据浅水多波束测深资料自身的特点以及影响资料质量的潮汐、声速等因素,探讨浅水多波束测深资料处理中的关键技术问题。
) W! s) d6 S' s$ d 采集系统及数据来源
) ^& u) v, x1 y* y" o9 C 本文研究数据来源于广州海洋地质调查局在澳门海域采集的多波束测深资料。多波束测深系统为R2Sonic2024Sonic2024,主要由发射接收主控单元、换能器阵、Windows7实时监控工作站、POSMV水下惯导测量系统、AML MinosX声速计组成。该浅水多波束测深系统是由美国R2Sonic公司研发,信号带宽高达60KHz,工作频率、覆盖宽度、覆盖扇区实时在线可调,当开角较窄时,水深点聚集在狭窄区域以增加系统的分辨率,从而探测海底微地貌特征。 ( c5 E9 n; D0 p8 b2 M: X( `9 \4 J
R2Sonic2024将声纳处理器和控制器嵌入到声纳探头中,这种设计使其更加轻便灵活,便于运输和携带,无庞大甲板单元,便于在测量船上安装。 5 t8 e! W1 H- ]; _5 q v+ y
本调查区西临澳门半岛、氹仔岛和路环岛,北临港珠澳大桥,属我国澳门特别行政区管辖海域,工区位置如图1中红色区域所示。调查区水深为2~8m,由于地处珠江入海口,水域条件比较复杂,大量泥沙伴随江水流入本调查区,因而水质比较混浊。另外,工区来往船只众多,不可避免的给原始资料带来噪音干扰。2018年11~12月完成了本工区资料采集,多波束测深系统单频发射256个波束,测线波束接收率全部在95%以上,覆盖宽度约为6倍水深,单条测线波束质量良好。
( L! U- e9 e# G6 O! W' G3 Y9 M 
8 Q/ `6 C4 {, j" \
图1 调查区位置示意图 # q8 R8 }' O! g6 ]7 z
应用测深数据后处理软件Caris HIPSand SIPS 8.1,对采集的澳门海域多波束资料进行精细处理,探讨浅水多波束资料处理关键技术。
! W4 A7 c4 k! ?. { 关键处理技术探讨
4 V! Z6 u8 v$ \; e, h9 z8 a. @8 u7 T 1 ) z. W: f) o" J
水位改正
( g( }) l4 |+ }+ {$ f( U 在多波束测深资料处理中,水位改正主要包括两方面:探头吃水深度和潮汐变化。在浅水海域进行多波束调查时,需每天早、晚对探头吃水深度各测量一次,后处理中将探头每天的吃水变化量输入到船配文件中,按时间线性插值对原始数据进行吃水变化改正,消除探头吃水变化对资料处理结果的影响。 * f) {# E9 W/ k. k
本次在澳门海域采集的多波束数据水深位于2~8m,根据DZ/T0292—2016《海洋多波束水深测量规程》,需要对本资料进行潮汐改正。潮汐改正是否科学准确对多波束相邻测深条带拼接质量产生重要影响,不加载潮汐或者应用不合理的潮汐数据都将会导致相邻测深条带拼接产生“台阶”状异常,严重影响多波束资料成果质量。因此,潮汐改正是浅水多波束资料处理中关键的环节之一。
2 `4 h f0 e" m# X) u( j' C2 u/ N 由于天气波动、地理位置、密度变化和洋流等因素,实测潮汐与预报潮汐存在较大差异。靠近港口、码头等海岸带浅水区域的潮汐性质比较复杂,潮汐场解算精度不高,在进行多波束测深资料潮汐改正时一般采用布设验潮站的方式。本工区紧邻澳门半岛、港珠澳大桥,属极浅水域,资料采集时工区没有布设验潮站,因而未采集实测潮汐数据,后处理中应用预报潮汐进行潮汐改正,往往并不能消除测深条带拼接“台阶”状异常现象。本工区在资料采集过程中使用了POSMV惯导系统,POSMV惯导系统集成了GNSS数据、惯导的角速度和加速度数据,无论调查船的运动状态如何,都可以为调查设备提供稳定而又精确的定位(经度、纬度和高程)、姿态(横摇、纵摇和航向)、涌浪、速度及其他性能指标参数。无验潮测深法基本原理为:根据GNSS大地高、测深仪测量的海底水深及当地平均海平面大地高获得海底高程。它是一种实时的、与动吃水无关的水位改正方法,能有效消除动态吃水及波浪等因素影响,可以提高成果数据质量,其工作原理示意图见图2。
3 I2 _$ o. h& [, Y: C 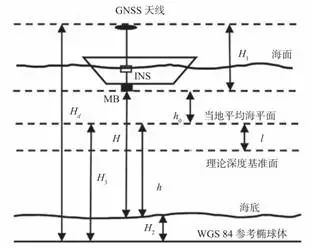
" Z- K) q+ D0 W7 j- H 图2 无验潮多波束测深工作原理示意图
* q5 N6 Y. @# o4 {& s1 ` H1为GNSS天线到测深仪探头的垂直距离;H为测深仪探头测量即时海底的深度;Hd为GNSS天线到WGS84椭球体面的距离,即GNSS大地高;H2为海底至WGS84椭球面的距离,即海底地形大地高;H3为当地平均海平面至WGS84椭球面的距离,即平均海面大地高(平均海面大地高依据“DTU10”平均海面大地高模型确定);H为当地平均海平面至海底的距离。由图2可知,海底地形大地高为: 4 F Q: o$ {! W0 a
H2=Hd-H1-H ⑴
9 J6 p$ k' e1 e; b$ u H 平均海面大地高为:
0 M# |/ Q# n0 ^, T6 t7 p7 i H3=H+H2 ⑵ " J5 X$ [ H3 p' B
因此,H=H3-Hd+H1+H ⑶ ! G |" B7 j* W3 d" b& p
利用多波束测量时同步记录的GNSS数据,通过Terrapos软件处理推算得到潮汐数据。图3为根据GNSS天线测高计算获得的潮汐曲线,潮汐基准面为当地平均海平面,潮汐最大值为1.1m,最小值为-1.1m,潮汐落差最大达2.2m。由于工区临近海岸线,水深浅,早晚潮汐变化大,潮汐对多波束数据质量的影响尤其严重。潮汐改正前相邻测深条带水深一致性较差,地形剖面呈现非常明显的“台阶”状异常,“台阶”垂向距离最大为25cm,见图4(a),水深曲面上表现为明显的虚假“台阶”地形,严重影响曲面质量。经过潮汐改正后,测深条带拼接“台阶”状异常现象基本消失,相邻测线地形剖面一致性良好,见图4(b),数据质量明显提高。
' c' u x. U1 m0 o/ d( [% D 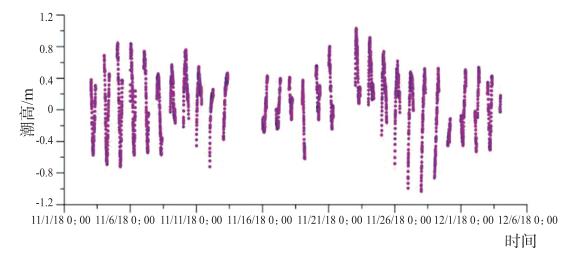
6 j6 ]( q" ?) l- \$ o; {* J& m, |
图3 潮汐曲线示意图 ( x1 w8 V( s4 Q+ t$ H
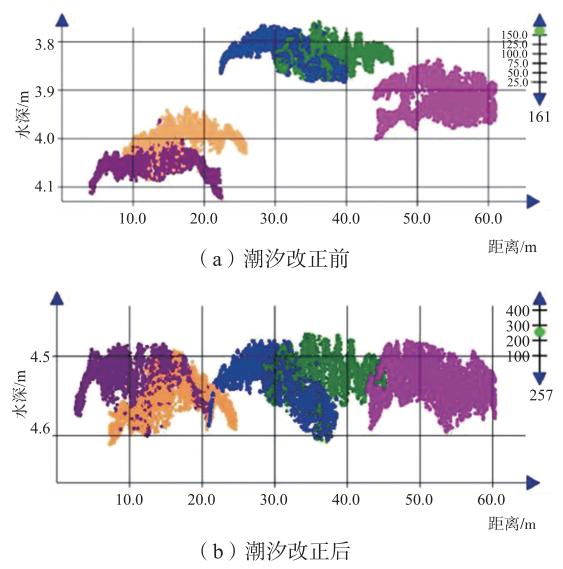
( A1 A: j' l, u0 y+ k 图4 潮汐改正前后地形剖面效果对比示意图 8 ]' G$ n! @8 a# n- J- j' \* n; {
2 & C& r' f+ p) n+ E% z: y
声速改正 7 c2 w7 n4 R9 L2 X! C" E% R: W
⑴加载声速剖面 6 A) D9 [6 G* i& j
多波束测深资料采集过程中,由于海水声速结构的不均匀性,导致声波传播方向发生改变,形成声线弯曲,从而使海底地形发生畸变。影响声速的因素主要有温度、盐度和压力,声速随海水温度、盐度及深度的增加而增大,其中温度对海水声速的影响最为显著。本次资料采集工区位于澳门海域,地处河海交汇处,水质情况比较复杂,海水温度早晚变化大。另外,涨潮时水体盐度因海水倒灌入侵升高,落潮时水体盐度因河水流入补充而降低,水体不同时段的盐度变化明显,影响工区水体声速剖面的测量,即使在同一位置不同时间测量的声速剖面也有很大的差异。因此,声速是影响多波束数据精度外部因素中最难控制的因素。
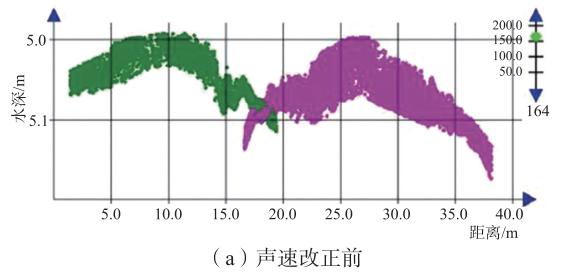
2 ^2 ~ k" i4 u' [6 J1 P; p; S 本次资料采集采用AMLMinosX声速计测量声速剖面,资料采集时仅将声速剖面改正的结果用于现场监控,并未将改正结果记录于原始数据内,因此后处理中需要进行声速剖面改正。正确的声速改正能够大大提高多波束测深精度,对提高多波束成果资料质量具有重要意义。由于海水温度是对声速影响最大的因素,而海水温度存在明显的时间变化,这种现象在沿海浅水区域尤为明显。因此,加载声速剖面时应根据“时间最近”原则对测区内多波束数据进行声速改正,而非根据“距离最近”原则。当根据“距离最近”原则选择距离测线最近的声速剖面进行声速改正时,同一条测线会分段采用不同的声速剖面,在两个声速剖面控制的边界开始出现异常。图5(a)为根据“距离最近”原则进行声速改正后的地形曲面,曲面左侧区域呈台阶状;图5(b)为根据“时间最近”原则进行声速改正后的地形曲面,曲面光滑连续、质量较高。 8 \6 [/ X: Y5 d+ }+ y2 Q
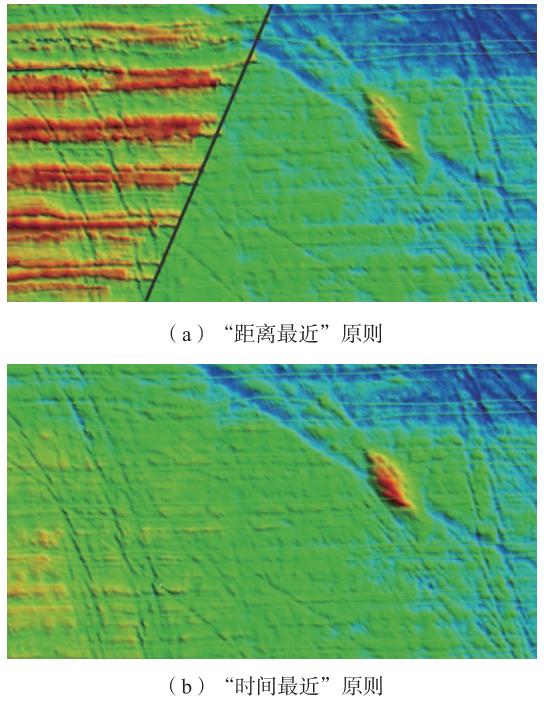
$ p+ w) [ G" y1 L 图5 声速改正前后曲面效果示意图 ) A- L: R) l( u) k
声速改正前测深条带呈“哭脸”状,见图6(a),相邻两个测深条带的重叠区域沿着航迹方向在地形曲面上表现为“沟垄”,声速改正后“哭脸”状消失,相邻测深条带一致性良好,见图6(b)。 0 c& t) S0 [# k7 S& I r
7 W" G' ?3 \/ o7 s9 J
图6 声速改正前后地形剖面效果示意图
7 ^& y% V& V; R$ v ⑵折射改正 & z% C, _2 b# G" t
由于浅水海域水文条件复杂,不同站位的声速变化大,测量的声速剖面与数据采集时当前的海水声速可能存在较大差异,后处理中即使经过了声速剖面改正,少数测线仍然无法完全消除由于声速剖面校正不足而产生的声速残留误差,测深条带仍然呈“哭脸”状,相邻测线测量的海底地形无法很好重叠,这种异常现象在海底地形平坦的区域尤其明显。 $ K! r( d ]. |
测深条带“哭脸”状异常是表层声速偏大、下部声速偏小所致。一般方法是在后处理时编辑声速剖面,然后对原始数据重新进行声速剖面改正,但是这种方法效率较低。Caris HIPSand SIPS 8.1软件提供了一种简便快捷的折射改正技术,在处理中应用ref Raction EditoR模块进行手动折射改正。由于不同测线测深条带弯曲程度各不相同,并且没有规律可循,处理时根据测线的分布、测深条带弯曲程度及曲面质量,检查相邻测线水深数据重叠区域,如果不同测线测量的地形无法很好的重叠,测试并选择合适的折射参数进行改正。
! h; ^) j3 ~: M( j 3
! F5 X6 v! Q! P8 C4 y4 j; D4 e 精度评估
0 W% X3 }% ?% K* B' m 多波束测量中存在着系统误差和随机误差,为保证资料处理成果质量,需对成果资料进行精度评估。
$ W, ^* I6 R' k1 X# y 多波束海底地形全覆盖测量精度评价参照GB/T12763.10-2007第10部分《海洋地形地貌调查》的要求:“主、检不符值限差为:水深小于30m时为0.6m,水深大于30m时为水深的2%,超限的点数不得超过参加精度评估总数的10%”。调查区水深全部位于30m内,处理成果资料的精度评估方法为:将主测线与检查测线以相同的参数(分辨率:1m×1m)分别构建海底数字地形模型,然后将两个水深曲面相减,即可得主测线和检查测线重合测量点的主检不符值。经统计,主测线与检查测线一共获得834097个水深交点,共有99.92%的主检不符值<0.6m,更精确地,其中98.34%的主检不符值≤0.2m,主检不符值直方图见图7。结果表明,经过各项处理后成果资料质量显著提高,精度满足相关规范要求。
) [' H# t( _ M/ K+ ^4 ~" M" A7 X9 O: x 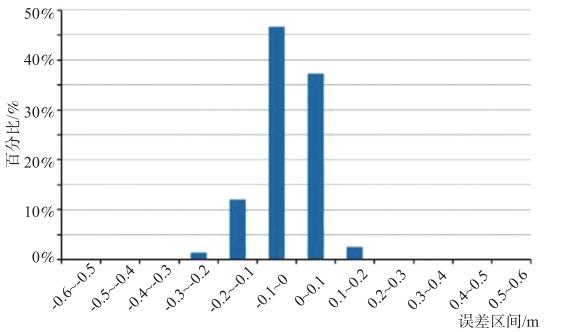
6 B/ s6 J2 z) n A 图7 主检不符值柱状示意图
# n9 E( V+ ]0 | x) ` 结束语 4 ~: \9 _ C7 @
由于浅水海域环境复杂,水浅、海水早晚温差大,潮汐和声速变化对多波束测深原始资料产生重要影响。因而,浅水多波束测深资料一直是数据处理中的难点。为了提高处理成果质量,针对影响浅水多波束资料处理成果质量的潮汐、声速等因素,本文提出利用POSMV惯导系统记录的GNSS大地高数据,经过处理转换得到潮汐数据,然后进行测区资料潮汐改正,消除了因潮汐因素产生的相邻测深条带拼接异常;根据“时间最近”原则选择声速剖面进行声速改正,改正效果良好,并对处理成果数据进行了精度评估。结果表明,处理成果资料精度满足海洋多波束测量相关规范要求。
! `5 s8 V$ ]7 M 目前,POSMV惯导系统在我国浅水海域多波束测深资料采集中还未得到广泛的应用,该技术方法可为浅水多波束测深资料采集的设备选择提供重要的依据。浅水多波束测深资料采集时使用集成GNSS数据的POSMV惯导系统,因其无需在工区布设短期或临时验潮站,可大大提高野外作业效率,降低资料采集成本,对浅水多波束测深资料采集和处理具有重要的实际意义,应用前景广泛。
2 W6 W# T# q2 F! } 由于在本工区进行资料采集时没有布设验潮站,因而未与实测潮汐数据进行对比。未来将会进一步开展应用本方法计算获得的潮汐数据与实测潮汐数据对比工作,对其误差进分析,并且如何改善本方法计算所得潮汐数据的精度亦是需要进一步研究的内容。
7 I/ g1 Q3 M& J, Q7 G0 e END ) P! H8 p* Q1 h
来源: 溪流之海洋人生 9 o3 h6 ~1 i7 H/ c7 Y6 }
作者简介:王启,1988年出生,山东菏泽人,工程师,主要从事海洋测绘与海洋综合物探资料处理研究
3 n1 Z. \! U1 W% I, L( g+ n7 w0 P 原标题:《学术交流 | 浅水多波束测深资料处理关键技术探讨》
$ X- Z) s) z( H6 B* U
2 p& h, m. ?4 A1 Q N; t h, U
3 e" g% t, _: x( S* o5 M$ {
2 K4 s3 g* [7 ^2 b; _
0 d) l$ h/ j$ f5 }9 q4 X: B" b+ o+ q M- Z
( z+ ]7 t2 x1 n2 u9 n
/ y) ~& z$ D8 |
; L0 o4 ]0 r x* Y% N | 

