5 x+ z+ P+ w9 U8 @! A l
9 f. D2 }! [/ `$ b" x V дәә们еҰӮжһңжғіж·ұе…ҘдәҶи§Јжө·жҙӢгҖҒеңЁжө·дёҠејҖеұ•з§‘еӯҰе®һйӘҢпјҢејҖеҸ‘жҲ–дҝқжҠӨжө·жҙӢиө„жәҗпјҢйғҪйңҖиҰҒиҺ·еҫ—дёҖдёӘжңҖеҹәзЎҖзҡ„жө·жҙӢдҝЎжҒҜвҖ”вҖ”ж°ҙж·ұгҖӮең°зҗғдёҠжө·жҙӢзҡ„е№іеқҮж·ұеәҰеӨ§зәҰдёә3800зұіпјҢе…¶дёӯжңҖж·ұеӨ„жҳҜеӨӘе№іжҙӢ马йҮҢдәҡзәіжө·жІҹвҖңжҢ‘жҲҳиҖ…ж·ұжёҠвҖқпјҢж·ұеәҰеӨ§зәҰ11000зұігҖӮ
9 z ^. r8 x' o. t
йӮЈд№ҲпјҢиҝҷ11000зұіж°ҙж·ұжҳҜеҰӮдҪ•жөӢйҮҸеҮәжқҘзҡ„е‘ўпјҹ
9 O. Y1 x; _. j3 Z0 k9 `! P жңүдәәй—®пјҢз”ЁжҝҖе…үеҸҜд»Ҙеҗ—пјҹйҷҶең°дёҠжҲ‘们е°ұеёёз”ЁжҝҖе…үжөӢйҮҸзү©дҪ“й—ҙзҡ„и·қзҰ»гҖӮ
* ^( j+ ^6 D5 y3 g1 ^& c9 }/ c, g
жҠұжӯүпјҢзӯ”жЎҲиҝҳжҳҜ
% X! h: o. N! O& r
- g {% N2 n, `$ _/ o# R; ^ еӣ дёәеҢ…жӢ¬жҝҖе…үеңЁеҶ…зҡ„з”өзЈҒжіўеңЁж°ҙдёӯдј ж’ӯж—¶иЎ°еҮҸйқһеёёеҝ«пјҢдј ж’ӯеҮ зҷҫзұіе°ұжІЎиғҪйҮҸдәҶпјҢжүҖд»ҘиӮҜе®ҡж— жі•з”ЁдәҺ11000зұіж·ұжө·еҹҹжҺўжөӢгҖӮ
& P/ A. q+ R4 |5 n
еҸҲжңүдәәй—®пјҢз”ЁвҖңе°әеӯҗвҖқжҖҺд№Ҳж ·пјҹжҲ‘жҠҠз»іеӯҗз»‘дёҠйҮҚзү©ж”ҫе…Ҙж°ҙдёӯпјҢзӯүйҮҚзү©жІүеҲ°еә•еҗҺпјҢйҖҡиҝҮжөӢйҮҸз»іеӯҗзҡ„й•ҝеәҰиҺ·еҫ—ж°ҙж·ұгҖӮ
, G2 }" C2 m0 a7 `$ g4 n) Y з»іеӯҗпјҲжөӢж·ұеһӮзәҝпјүжөӢйҮҸпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүеҶҚж¬ЎжҠұжӯүпјҢиҝҷдёӘж–№жі•зңӢдјјзӣҙи§ӮпјҢе®һеҲҷвҖҰвҖҰж•ҲзҺҮеҸҲдҪҺпјҢжөӢйҮҸз»“жһңиҜҜе·®еҸҲеӨ§пјҢиҖҢдё”еҸӘжңүзү№ж®ҠеҲ¶дҪңзҡ„з»іеӯҗжүҚиғҪиә«иҙҹйҮҚзү©жІүеҲ°11000зұіж°ҙж·ұиҝҳдёҚж–ӯиЈӮпјҢеҸҚжӯЈд№ҹжҳҜ
& L3 O) d8 D9 l8 B5 x+ k
* m. i- B! {$ ]+ `* @* C иҝҷд№ҹдёҚеҸҜд»ҘйӮЈд№ҹдёҚеҸҜд»ҘпјҢеҲ°еә•жҖҺд№Ҳж ·жүҚеҸҜд»Ҙе‘ўпјҹ
% q. _" M7 A, F2 j/ l( X$ S иҝҷдёӘжөӢйҮҸжө·жҙӢж·ұеәҰзҡ„й—®йўҳпјҢеҪ“然早е°ұжңүдәәжҖқиҖғиҝҮпјҢ并确е®һжңүеҮ з§Қж–№жі•жҳҜеҸҜиЎҢзҡ„пјҢдёҚ然е’ұ们жҖҺд№ҲзҹҘйҒ“зҡ„еӨ§жө·жңүеӨҡж·ұе‘ў~
: |( y+ O# p; v дёҖз§Қж–№жі•жҳҜеёғж”ҫж·ұеәҰи®ЎпјҲжҲ–еҺӢеҠӣи®ЎпјүеҲ°жө·еә•иҝӣиЎҢжөӢйҮҸгҖӮ
$ N! b2 p' ] P9 o- Z2 E* E
дёҚиҝҮиҝҷз§Қж–№жі•еёғж”ҫеӣһ收иҝҮзЁӢйңҖиҰҒеҫҲй•ҝж—¶й—ҙпјҢиҖҢдё”ж°ҙж·ұз»“жһңжҳҜж №жҚ®еҺӢеҠӣе’Ңжө·ж°ҙзү№жҖ§еҸҚжј”еҮәжқҘзҡ„пјҢз»“жһңдјҡжңүдёҖе®ҡиҜҜе·®гҖӮеӣ жӯӨпјҢиҝҷз§Қж–№жі•иҷҪ然з©әй—ҙеҲҶиҫЁиғҪеҠӣйқһеёёй«ҳпјҢдҪҶжҺўжөӢж•ҲзҺҮпјҲеҚ•дҪҚж—¶й—ҙжүҖжҺўжөӢзҡ„йқўз§ҜпјүйқһеёёдҪҺгҖӮ
" R6 m% M" R3 ~$ m1 f
ж·ұеәҰи®ЎжөӢйҮҸпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүиҝҳжңүдёҖз§Қж–№жі•пјҢжҳҜж №жҚ®йҮҚеҠӣеҪұе“ҚдёӢдёҚеҗҢж·ұеәҰзҡ„жө·е№ійқўй«ҳеәҰдёҚеҗҢиҝҷдёҖзү№жҖ§пјҢеҲ©з”ЁеҚ«жҳҹйҒҘж„ҹжөӢйҮҸжө·е№ійқўй«ҳеәҰиҝӣиҖҢеҸҚжј”ж°ҙж·ұзҡ„ж–№жі•гҖӮ
* o% \2 ^9 e4 O0 V7 _
иҝҷз§Қж–№жі•зҡ„жҺўжөӢж•ҲзҺҮйқһеёёй«ҳпјҢдҪҶжҳҜжҺўжөӢз»“жһңзҡ„з©әй—ҙеҲҶиҫЁиғҪеҠӣиҫғдҪҺпјҢж— жі•еҫ—еҲ°зІҫзЎ®зҡ„жө·еә•ең°еҪўж•°жҚ®гҖӮ
! R; ~( W6 h8 q
еҚ«жҳҹйҒҘж„ҹжөӢйҮҸпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјү第дёүз§ҚпјҢе°ұжҳҜзӣ®еүҚжңҖеёёз”Ёзҡ„еЈ°еӯҰж–№жі•гҖӮ
$ q7 @1 Z' R! n# s& J3 c4 N' U
еӣ дёәеЈ°жіўеңЁж°ҙдёӯдј ж’ӯж—¶иЎ°еҮҸиҝңе°ҸдәҺз”өзЈҒжіўпјҢйў‘зҺҮи¶ҠдҪҺиЎ°еҮҸи¶Ҡе°ҸпјҢжүҖд»ҘйҖҡиҝҮеҗҲзҗҶйҖүжӢ©йў‘зҺҮпјҢеҸҜе®һзҺ°11000зұіж·ұжө·еҹҹжҺўжөӢгҖӮ
; D0 m/ d, j2 D4 `- X* l: i
дёҖејҖе§ӢпјҢ科еӯҰ家们дҪҝз”Ёзҡ„жҳҜеҚ•жіўжқҹжөӢж·ұд»ӘпјҢе®ғе®үиЈ…еңЁиҲ№еә•пјҢе·ҘдҪңж—¶еҗ‘иҲ№зҡ„жӯЈдёӢж–№еҸ‘е°„дёҖжқҹеЈ°жіўдҝЎеҸ·пјҢеЈ°жіўеҲ°иҫҫжө·еә•еҸҚе°„еӣһжқҘеҶҚз”ұеҚ•жіўжқҹжөӢж·ұд»ӘжҺҘ收гҖӮз»“еҗҲеЈ°жіўеңЁж°ҙдёӯдј ж’ӯйҖҹеәҰгҖҒеҸ‘е°„еҲ°жҺҘ收жүҖз”Ёдј ж’ӯж—¶й—ҙпјҢе°ұеҸҜд»Ҙи®Ўз®—еҮәжө·еә•ж·ұеәҰгҖӮ
, q% F' ]- |( {. e еҚ•жіўжқҹжөӢж·ұд»ӘеҸҜд»Ҙеҝ«йҖҹжңүж•Ҳең°жөӢйҮҸжө·жҙӢж·ұеәҰпјҢдҪҶдёҖж¬ЎжөӢйҮҸеҸӘиғҪиҺ·еҫ—дёҖдёӘдҪҚзҪ®зҡ„ж°ҙж·ұз»“жһңпјҢж•ҲзҺҮиҝҳжҳҜжҜ”иҫғдҪҺгҖӮ
+ o" R' d% c" t
еҚ•жіўжқҹжөӢж·ұпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүдёәдәҶиҝӣдёҖжӯҘжҸҗй«ҳ11000зұіжө·еҹҹзҡ„еЈ°еӯҰжҺўжөӢж•ҲзҺҮпјҢж»Ўи¶ідёҚж–ӯжҸҗй«ҳзҡ„з§‘з ”йңҖжұӮпјҢ科еӯҰ家们жҗһеҮәдәҶдёҖдёӘеҸ«вҖңе…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹвҖқзҡ„дёңиҘҝгҖӮ
( G6 X5 i, r+ x
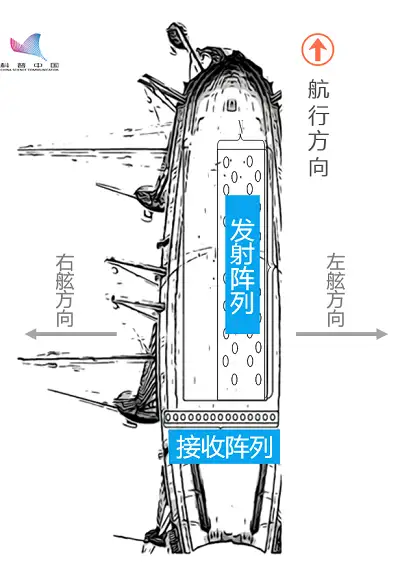
е…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүе…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹд№ҹжҳҜе®үиЈ…дәҺиҲ№дҪ“пјҢе·ҘдҪңйў‘зҺҮдёҖиҲ¬дёә12kHzпјҢд»ҺеӨ–и§ӮдёҠзңӢжҳҜдёӨжқЎйҳөпјҢ第дёҖжқЎжҳҜеҸ‘е°„йҳөпјҢжІҝзқҖиҲ№дҪ“йҫҷйӘЁж–№еҗ‘е®үиЈ…пјҢе®ғеҸ‘еҮәзҡ„еЈ°жіўдҝЎеҸ·дјҡеҪўжҲҗдёҖдёӘвҖңеҸ‘е°„жүҮйқўвҖқпјҢвҖңз…§е°„вҖқеҲ°еһӮзӣҙиҲ№дҪ“йҫҷйӘЁж–№еҗ‘зҡ„жө·еә•жқЎеёҰзҡ„еҗ„дёӘдҪҚзҪ®гҖӮеңЁвҖңеҸ‘е°„жүҮйқўвҖқдёҠпјҢжіўжқҹжІҝзқҖйҫҷйӘЁж–№еҗ‘еј ејҖзҡ„и§’еәҰиҫғе°ҸпјҢдёә0.5иҮі2еәҰпјҢеҪ“жіўжқҹи§’еәҰдёә1еәҰж—¶пјҢеҸ‘е°„йҳөзҡ„й•ҝеәҰзәҰдёә8зұігҖӮ
; k2 m5 f* H$ j5 g' F3 ~; o' E
第дәҢжқЎжҳҜжҺҘ收йҳөпјҢеһӮзӣҙдәҺиҲ№дҪ“йҫҷйӘЁзҡ„ж–№еҗ‘е®үиЈ…пјҢз”ЁдәҺжҺҘ收д»Һжө·еә•еҸҚе°„е’Ңж•Је°„еӣһжқҘзҡ„еЈ°жіўдҝЎеҸ·гҖӮеҲ©з”ЁеЈ°еӯҰдҝЎеҸ·еӨ„зҗҶж–№жі•пјҢжҺҘ收йҳөеҸҜд»ҘеҸӘжҺҘ收жқҘиҮӘзү№е®ҡж–№еҗ‘зҡ„еЈ°жіўдҝЎеҸ·пјҢеҪўжҲҗе®ҡеҗ‘зҡ„вҖңжҺҘ收жүҮйқўвҖқгҖӮеңЁвҖңжҺҘ收жүҮйқўвҖқдёҠпјҢи§’еәҰдёә1иҮі2еәҰзҡ„еӨҡдёӘзӘ„жіўжқҹеһӮзӣҙйҫҷйӘЁж–№еҗ‘еӣһ收пјҢеҪ“жіўжқҹи§’еәҰдёә2еәҰж—¶пјҢжҺҘ收йҳөзҡ„йҳөй•ҝзәҰдёә4зұігҖӮ
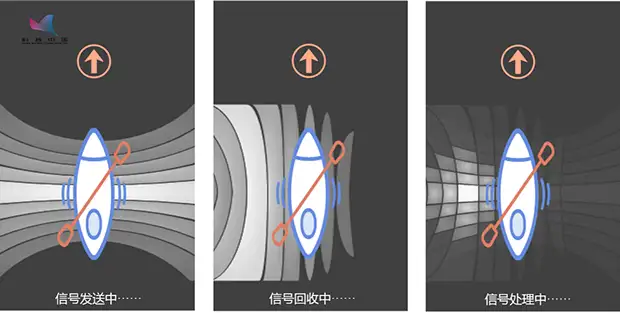
3 Y7 \3 V2 r# Q е…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹзҡ„еҸ‘е°„йҳөеҲ—е’ҢжҺҘ收йҳөеҲ—зӨәж„ҸеӣҫпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүвҖңжҺҘ收жүҮйқўвҖқдёҺвҖңеҸ‘е°„жүҮйқўвҖқзӣёдәӨж–№еҗ‘вҖңз…§е°„вҖқеҲ°зҡ„жө·еә•е°ұжҳҜиў«жөӢеҢәеҹҹпјҢж №жҚ®еЈ°жіўдҝЎеҸ·дј ж’ӯеӣһжқҘзҡ„ж–№еҗ‘дёҺеҫҖиҝ”ж—¶й—ҙпјҢеҸҜд»Ҙи®Ўз®—еҮәиў«жөӢеҢәеҹҹзҡ„ж°ҙж·ұе’Ңи·қзҰ»иҲ№дҪ“зҡ„ж°ҙе№ідҪҚзҪ®гҖӮ
* i' v" K" y5 h2 j2 W
иҲ№дёӢж–№зҡ„жө…иүІеҢәеҹҹеҚіиў«жөӢеҢәеҹҹпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүеӨҡжіўжқҹжөӢж·ұзі»з»ҹзҡ„жҺҘ收йҳөеҸҜд»ҘеҗҢж—¶жҺҘ收жҲҗзҷҫдёҠеҚғдёӘзү№е®ҡж–№еҗ‘дёҠзҡ„еӣһжіўпјҢд№ҹе°ұжҳҜиҜҙпјҢдёҖж¬ЎжөӢйҮҸе°ұеҸҜд»ҘиҺ·еҫ—жҲҗзҷҫдёҠеҚғдёӘдҪҚзҪ®зҡ„ж°ҙж·ұгҖӮ
& a) }! Y9 @0 B; ^" u+ } еӣ жӯӨпјҢе…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұжҳҜзӣ®еүҚж—ўй«ҳж•ҲеҸҲеҮҶзЎ®зҡ„11000зұіжө·еҹҹпјҲеҢ…жӢ¬ж·ұжө·жө·еҹҹпјүж°ҙж·ұжөӢйҮҸж–№жі•пјҢе…¶з©әй—ҙеҲҶиҫЁиғҪеҠӣжҳҫи‘—й«ҳдәҺеҚ«жҳҹйҒҘж„ҹжөӢйҮҸж–№жі•гҖӮ
' d# m; M- z+ y1 R/ F
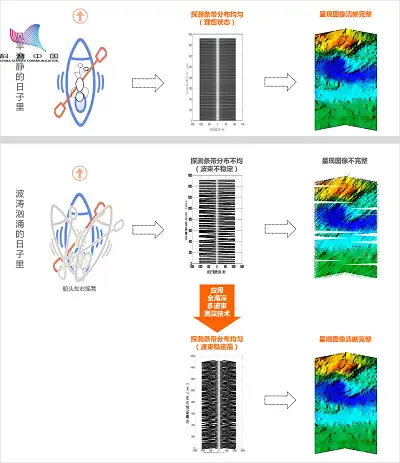
йҖҡеёёжғ…еҶөдёӢпјҢиҲ№дёҖиҫ№еҗ‘еүҚиҲӘиЎҢпјҢдёҖиҫ№жөӢйҮҸж°ҙж·ұпјҢиҝҷж ·дёҖж¬ЎеҸҲдёҖж¬Ўзҡ„жөӢйҮҸз»“жһңжӢјжҺҘиө·жқҘпјҢе°ұиғҪеӨҹеҫ—еҲ°дёҖзүҮеҢәеҹҹзҡ„ж°ҙж·ұеӣҫпјҢд№ҹе°ұжҳҜжө·еә•ең°еҪўеӣҫгҖӮ
& o& F2 O# V5 k' f иҖҢеңЁе®һйҷ…жөӢйҮҸдёӯпјҢе…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹеҝ…йЎ»йқўдёҙзҡ„йҡҫйўҳжҳҜжіўжқҹзЁіе®ҡжҠҖжңҜгҖӮ
& A+ G1 o$ L) T, _/ A& y
дј—жүҖе‘ЁзҹҘпјҢеӨ§йғЁеҲҶж—¶й—ҙйҮҢжө·жҙӢдёҚдјҡйЈҺе№іжөӘйқҷгҖӮ
! \8 G1 |, z4 T
дёҚе…үжө·йқўдёҠжіўж¶ӣзҝ»ж»ҡпјҢжңүж—¶зңӢдјје№ійқҷзҡ„жө·йқўдёӢд№ҹдёҚе№ійқҷжө·ж°ҙдёӯзҡ„еЈ°йҖҹзәҰдёә1500зұі/з§’пјҢжҺўжөӢ11000зұіжө·еҹҹж—¶пјҢе…Ёжө·ж·ұеӨҡжіўжқҹдёҖж¬ЎжөӢйҮҸиҝҮзЁӢпјҲд»ҺејҖе§ӢеҸ‘е°„еЈ°жіўеҲ°жҺҘ收е®ҢжңҖиҝңз«Ҝиҝ”еӣһзҡ„еЈ°жіўпјүйңҖиҰҒеҮ еҚҒз§’пјҢеңЁиҝҷж®өж—¶й—ҙйҮҢиҲ№зҡ„е§ҝжҖҒе§Ӣз»ҲйҡҸзқҖйЈҺжөӘеҸҳеҢ–пјҢжӯӨж—¶еЈ°жіўзҡ„еҸ‘е°„ж–№еҗ‘е’ҢеӣһжіўжҺҘ收方еҗ‘еҸҜиғҪйғҪдёҚеҶҚжҳҜйў„и®ҫзҡ„ж–№еҗ‘пјҢеҫ—еҲ°зҡ„ж°ҙж·ұз»“жһңе°ұдјҡеӯҳеңЁиҜҜе·®пјҢжӢјжҺҘиө·жқҘзҡ„ж°ҙж·ұеӣҫеҸҜиғҪдјҡеҸ‘з”ҹжүӯжӣІгҖӮ
6 d9 }, H8 W: F4 {+ ?* E7 x3 ~& a u
йЈҺжөӘеҜјиҮҙиҲ№дҪ“е§ҝжҖҒеҸҳеҢ–пјҢжөӢж·ұзҡ„жіўжқҹйҡҫд»ҘзЁіе®ҡпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүиҝҷж—¶еҖҷе°ұиҰҒж”ҫеӨ§жӢӣдәҶпјҒ
) [9 S/ K, |2 Z6 s
йҖҡиҝҮйў„жөӢиҲ№дҪ“зҡ„е§ҝжҖҒпјҢе…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹйҮҮеҸ–зӣёеә”зҡ„иЎҘеҒҝжҺӘж–ҪпјҢж— и®әиҲ№зҡ„е§ҝжҖҒеҰӮдҪ•еҸҳеҢ–пјҢжңҖз»ҲеҸ‘е°„е’ҢжҺҘ收зҡ„еЈ°жіўйғҪиғҪзЁіе®ҡеңЁйў„е®ҡзҡ„ж–№еҗ‘дёҠпјҢиҺ·еҫ—жӣҙеҠ еқҮеҢҖзҡ„жҺўжөӢз»“жһңгҖӮ
" D# \( P1 y& `3 Z$ ?2 ^ дёәдәҶдҪҝеЈ°жіўжқЎеёҰе°ҪеҸҜиғҪдёҺиҲ№иҲӘиЎҢж–№еҗ‘еһӮзӣҙпјҢеҸ‘е°„ж—¶йҮҮз”Ёеҗ‘дёҚеҗҢж–№еҗ‘еҲҶеҲ«еҸ‘е°„еӨҡдёӘеЈ°жіўжүҮйқўжӢјжҲҗж•ҙдёӘеЈ°жіўжқЎеёҰзҡ„зӯ–з•ҘпјҢжӯӨж—¶еҗ„дёӘжүҮйқўвҖңз…§е°„вҖқжө·еә•еҢәеҹҹзҡ„дёӯеҝғзҡ„иҝһзәҝеһӮзӣҙдәҺиҲ№иЎҢж–№еҗ‘гҖӮ
4 T* A+ R- l# u8 A9 L6 f жіўжқҹзЁіе®ҡж•ҲжһңпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүжӯӨеӨ–пјҢдёәжӣҙеҘҪең°е®һзҺ°11000зұіжө·еҹҹж°ҙж·ұжҺўжөӢпјҢе…Ёжө·ж·ұеӨҡжіўжқҹжөӢйҮҸиҝҳйҮҮеҸ–еӨҡз§Қж¶ҲйҷӨиҜҜе·®е’ҢеҒҸе·®зҡ„жҺӘж–ҪпјҢеҢ…жӢ¬йҖүжӢ©еҗҲзҗҶзҡ„еҸ‘е°„дҝЎеҸ·пјҢиҝӣиЎҢе§ҝжҖҒгҖҒдҪҚзҪ®гҖҒеЈ°йҖҹеҒҸе·®дҝ®жӯЈд»ҘеҸҠеӨҡжҷ®еӢ’ж•Ҳеә”дҝ®жӯЈзӯүгҖӮ
{8 D) i- U/ z
е…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹеҸҜе®һзҺ°жіўжқҹе®һж—¶зЁіе®ҡпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүеӨҡз§ҚжөӢж·ұжүӢж®өзҡ„жҜ”иҫғпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүеңЁе®һзҺ°11000зұіж·ұжө·еҹҹй«ҳж•ҲеҮҶзЎ®жҺўжөӢзҡ„еҗҢж—¶пјҢе…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹиҝҳе…·еӨҮжңҖжө…еңЁ20зұіж·ұжө·еҹҹиҝӣиЎҢжҺўжөӢзҡ„иғҪеҠӣпјҢ并еҲ©з”ЁеЈ°жіўжҺўжөӢжө·еә•ең°иІҢдёҺж°ҙдёӯзӣ®ж ҮпјҢдёәж·ұжө·жө·еҹҹжҺўжөӢжҸҗдҫӣжӣҙдё°еҜҢзҡ„жҺўжөӢдҝЎжҒҜгҖӮ
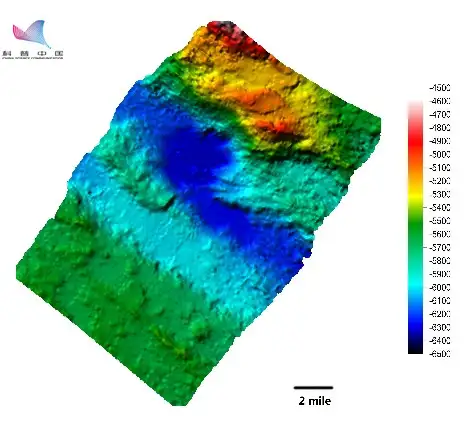
& {+ c6 `: M& p9 t4 r. B# U е…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹз»ҳеҲ¶зҡ„жө·еә•ең°еҪўеӣҫпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүиҖҢдё”иҝ‘жңҹпјҢд»Ҙдёӯ科йҷўеЈ°еӯҰжүҖдёәж ёеҝғзҡ„з§‘з ”еӣўйҳҹпјҢз»ҸиҝҮеҚҒе№ҙзҡ„иү°иӢҰз ”еҲ¶дёҺжҠҖжңҜж”»е…іпјҢжҲҗеҠҹз ”еҲ¶еҮәдәҶжҲ‘еӣҪйҰ–еҘ—е…·жңүиҮӘдё»зҹҘиҜҶдә§жқғзҡ„е…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹпјҢ并且已е®үиЈ…дәҺ科еӯҰиҖғеҜҹиҲ№ејҖеұ•дәҶ6000еӨҡе…¬йҮҢжөӢзәҝеә”з”ЁзӨәиҢғпјҢдҪҝжҲ‘еӣҪжҲҗдёә继жҢӘеЁҒгҖҒеҫ·еӣҪе’Ңдё№йәҰд№ӢеҗҺ第еӣӣдёӘз ”еҲ¶еҮәзҺ°д»Је…Ёжө·ж·ұеӨҡжіўжқҹжөӢж·ұзі»з»ҹзҡ„еӣҪ家пјҒ
/ B C- Z( t$ Z I2 u+ g% C% C* [
иүҜеҷЁеңЁжүӢпјҢж·ұжө·ең°еӣҫжҲ‘жңүпјҲеӣҫ/дёӯ科йҷўеЈ°еӯҰжүҖпјүдҪңиҖ…пјҡдёӯеӣҪ科еӯҰйҷўеЈ°еӯҰз ”з©¶жүҖ жө·жҙӢеЈ°еӯҰжҠҖжңҜдёӯеҝғ зҺӢиҲ’ж–Ү еҲҳжҷ“дёң
3 {* U% R/ b) }- a
еҮәе“Ғпјҡ科жҷ®дёӯеӣҪ 科жҷ®иһҚеҗҲеҲӣдҪңдёҺдј ж’ӯйЎ№зӣ®
) n6 m) x: M6 u
зӣ‘еҲ¶пјҡдёӯеӣҪ科еӯҰйҷўи®Ўз®—жңәзҪ‘з»ңдҝЎжҒҜдёӯеҝғ
4 D' Z( J: n( ?: n) O 科жҷ®иһҚеҗҲеҲӣдҪңдёҺдј ж’ӯйЎ№зӣ®жҳҜдёӯеӣҪ科жҷ®еҚҡи§ҲеӣўйҳҹеңЁеҒҡзҡ„科жҷ®дёӯеӣҪеӯҗйЎ№зӣ®пјҢж¬ўиҝҺжҠ•зЁҝпјҲеҺҹеҲӣ科жҷ®пјүпјҢйӮ®з®ұyddzptj@cnic.cnпјҢзЁҝиҙ№еӨҡпјҢе№іеҸ°е№ҝпјҢйҖҹжқҘ~
6 r1 g8 t* y( F9 l/ H