|
* _' i9 N7 R O" d 
一、引言* F; I1 h( f7 i7 l- G
《中国海洋21世纪议程》明确地提出了建设海洋强国的战略任务。它主要是着力建设海洋经济区域、发展海洋产业、研究海洋科学技术问题、维护国家海洋权益和利益、强化海上力量建设等;而海洋测绘是建设海洋强国一项前期性和基础性的重大工程;点位测定,是为海洋测绘提供基准数据的超前性工作,卫星导航定位,则是精确测定点位的一种现代高新技术。
" B6 N" V% ~3 G 2012年12月27日,我国宣布建成了区域覆盖的北斗卫星导航系统,并将它的英文名定为BeiDou Navigation Satellite System,缩写为BDS。它是中国自主建设、独立运行,与GPS等系统兼容的卫星导航系统,可为覆盖区域内的用户提供全天候、全天时和高精度、高可靠的定位、导航、授时服务。在此基础上,将逐步发展到成为全球导航卫星系统。而于2015年3月30日21时52分,我国在西昌卫星发射中心用长征三号丙运载火箭成功将首颗全球性覆盖星座的M01卫星发射升空,卫星顺利进入预定轨道。预计2020年左右,将建成由5颗静地轨道卫星和30颗非静地轨道卫星组成的覆盖全球的北斗卫星导航系统,为全球用户提供更精准、更可靠的定位、导航和授时服务,并通过星间链路实现星—星组网、互联互通。因此,如何利用北斗卫星导航信号为海洋强国建设发挥重大作用,是一个业界同行们积极探索的重大问题;本文拟对此提出几种应用建议,以供研讨。 二、北斗卫星导航信号能够为我国海洋测绘发挥重大作用: w3 h" p8 Q+ U( j, J( _
1990年春天,国家测绘局、国家海洋局和国家地震局联合组建了中国南海GPS岛礁联测分队,首次用3台WM-102GPS双频接收机,在南海5个岛礁8个点位和陆地4个大地测量控制点之间进行了GPS定位联测,建立了一个高精度的中国南海的陆海大地测量控制网。这是经典大地测量技术无法实现的海陆联测定位。同理,只要我们拥有高精度的BDS信号接收机,采用北斗卫星导航信号,也能够在我国300万平方千米的广阔海域进行高精度的海陆联测定位。
* w* \& b* p/ m0 Q; o. ~ 浅水海域测绘,特别是海图与陆图的衔接测量,已成为海洋测绘急待解决的大难题,国内外的机载激光测深系统实用表明,它是浅水海域海底地形测绘的先进技术装备。本世纪初叶,华中理工大学和中国科学院上海光学精密机械研究所等单位,先后研制成功了机载激光测深系统,并进行了机载飞行实验,获得了较好的实验结果,目前正在更新换代。这几种机载激光测深系统都采用了机载GPS测量来测定飞机的在航位置。例如,中国科学院上海光学精密机械研究的新型机载激光测深系统LADM-Ⅱ,其机载GPS测量的水平定位精度是5m。如果采用笔者建议的多个BDS基准站的机载激光测深/BDS定位测量方案(见图1),不仅能够大幅度提高水平定位精度,而且能够测定在航飞机的实时高度,并能够确保这种三维位置精度的高度可靠性。这是基于笔者率其研究生们用多个GPS基准站的机载GPS对地航空摄影测量的成功实用而做出的结论。
1 x' S6 J2 V3 m 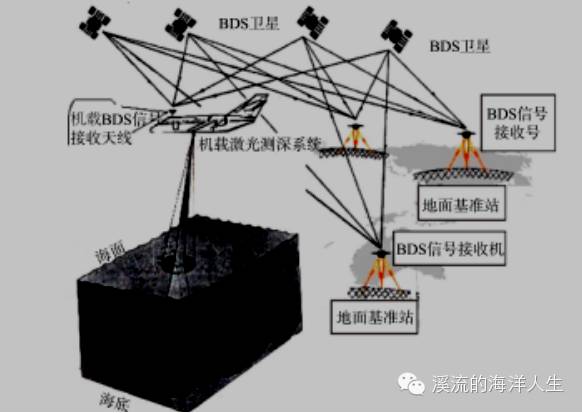
, ^9 F+ w$ t1 [" D5 R4 U
图1 作者建议的多个BDS基准站的机载激光测深/BDS定位测量方案示意图
$ r( Z$ N% \" u 自1994年5月开始,笔者率其研究生们与有关单位合作,先后利用里尔、双水獭和空中国王三种航摄飞机,在国内8个地区共222010km2的航摄测区,为航空摄影测量制图进行了100多架次飞行的机载GPS动态载波相位测量的生产实践应用,取得了大量的机载GPS动态载波相位测量的优质数据,并用我们研究成功的DDKINGPS动态数据处理软件,精确地算得了所需的点位三维坐标。太原测区的计算结果表明,利用100个毫米级精度的地面控制点检核,二维位置精度达到了±7.9cm,高程精度为±18.1cm。这充分表明,只要选用适当的GPS观测量和测量模式,就能削弱SA技术的人为精度损失和GPS测量误差影响,中国GPS用户也能够获得亚米级甚至更优精度的三维实时点位坐标。因此,我们的GPS动态载波相位测量技术,已成功地用于(飞)机载惯性导航系统的校验测量研究多年。这为多个BDS基准站的机载激光测深/BDS定位测量奠定了坚实的技术基础。 三、北斗卫星导航信号与激光测距的协同应用建议
8 W- a- R* B/ ?. E# v$ Q9 D! c: s L 基于笔者自20世纪80年代以来对GPS卫星导航定位/卫星激光测距技术的研究,提出下述北斗卫星导航信号与激光测距的协同应用建议。
" O% _" j& m2 E$ c1 k2 k9 U ⒈ 用于海底定位的BDS/激光测距协同系统 5 Z& n1 N- c/ n. i9 r& N8 a- I
海洋灾害监测的一种有效技术途径是,在海底地层上布测高精度而稳定可靠的大地测量控制网;通过较长时间(如二、三年)的重复观测成果,研究海底板块运动和海底地壳形变,以此探测灾害性的海况信息。GPS技术的问世,为建立海底大地测量控制网提供了有效的技术新途径。现行GPS海底大地测量控制网的布测方法是,用GPS信号测量船载GPS信号接收天线的实时位置,通过同步测量海底声标和测量船之间的水下声距,而联合解算出每一个海底声标的精确位置。模拟计算表明,当船载GPS实时点位的二维位置精度为±5m,而船位高度和水下声距的测量精度均为±5m时,声标点位的平均中误差为±4m左右,声标点位的最大中误差在±10m以内。这已能满足某些海底工程建设的需要,而受到海洋学界的高度重视。
: q% f, v N6 | 但是,米级精度的海底大地测量控制点,不能满足海底地球动力学研究和灾害性海况信息探测的需要,必须将其提高一二个数量级。特别是同一个点位的重复测量精度,需要达到厘米级甚至更高的测量精度,才能准确地测得海底地壳动态参数,捕获灾害性的海况信息。这是当今海底大地测量的一个国际性难题。为了寻求海底点位的精确测量方法,笔者曾于1992年3月提出了用于海底定位的GPS/激光测距协同系统的概念设计。现将它更改为用于海底定位的船载DBDS/激光测距协同系统,亦是可行的。该系统包括以下4个子系统(见图2)。
8 I4 g) _! |% V% n 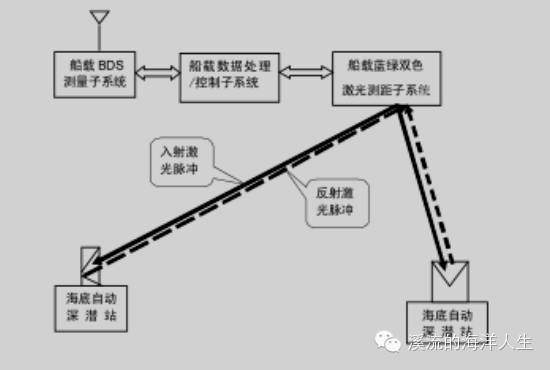
% d# B3 H1 Q. ]% Q% \
图2 作者建议的用于海底定位的船载DBDS/激光测距协同系统示意图
8 |1 y) ]# n" Y+ c/ T& V ①船载DBDS测量子系统,用于精确测量船载BDS信号接收天线在海面上航行时的实时位置。我们长达5年多的机载GPS动态载波相位测量的生产实践成果表明,中国用户能够获得亚米级甚至更优的实时点位测量精度。因此,船载DBDS测量能够获得高精度的实时点位测量。 , V' @4 i+ [4 C
②船载蓝绿双色激光测距子系统,它同时发射的4束激光,分别射向安置在海底的4个带激光后向反射镜阵列的自动深潜站,用以同时测定海面船只至4个自动深潜站的距离。 0 c8 s8 @7 ?2 {
③船载数据处理/控制子系统,它既用于控制和协调BDS数量采集和双色激光测距,又用于处理BDS定位和双色激光测距的协同数据,而实时地解算出4个海底深潜站各自的三维坐标。 % ~9 J) o3 `8 s& G" E' Q
④海底自动深潜站,它不仅能够按要求自动地深潜到海底预定位置,而且带有激光后向反射镜阵列,用于反射来自船载蓝绿双色激光测距子系统的激光脉冲。 ( D/ E. N% k N. U; o
从上可见,船载DBDS/激光测距协同系统采用船载DBDS测量和双色激光测距相结合的技术途径,不仅能够以厘米级精度测定海底大地测量控制点,以此探测灾害性的海况信息,而且能够用于水下目标探测和海底沉船打捞的精确定位,很值得我们研发,以便创立具有中国特色的海底测量系统。
( r- T- Y* ?; _2 M1 |! X$ { ⒉ 船载BDS/双色激光测距系统 * U( Y5 u7 r5 ^6 S
现行的水下定位,是采用长基线水声定位系统或短基线水声定位系统,亦用超短基线水声定位系统。它们的基本工作原理,都是基于水下声距的测量,进而依据海底应答器的已知坐标,解算出拖体的所在点位。为了测定拖体的所在位置,除了在该拖体上安设水声定位测量设备以外,还需在海底上布设几个水声应答器,并精确测定它们的点位坐标,作为解算拖体点位的已知值。且不论其测量设备之复杂,仅测定各个海底应答器的点位坐标,便令人生畏。如果需在广阔的海域作业,其海底应答器的布设和点位坐标测定,更太费时,太费力,太费资。对于中国用户而言,购得长基线水声定位系统并非易事。因此,研制新型水下定位系统,是我国向海洋进军中急待解决的大难题。 ' _9 J& u- d, F" e( F; L) J: J) Z
为了彻底解决水声定位精度低的问题,笔者提出将回声定位法改变为激光测距和BDS测量的协同定位法(见图3)。20世纪的80年代初期,地面激光测距仪,开始采用双色激光测量大气折射改正,致使激光测距精度提高了一个数量级,在此基础上,笔者将它用于船载BDS/色激光测距系统。 3 ^" Q1 t' q/ P8 E

/ X- [, P5 x% \- I8 V1 G 图3 作者建议的船载BDS/双色激光测距系统的基本结构示意图
! i1 }! y* E" `% _* f 20世纪的80年代中期,美国Goddard宇航中心研制成功了用于地面对卫星测距的脉冲式双色激光测距仪。在921m地面基线上的试验表明,该仪器达到了1.8mm的测距精度。因此,原拟于2001年7月发射的EOS-ALT测高卫星,亦采用绿紫激光测量卫星和地面之间的距离。该颗卫星上安设的激光测距仪,采用一个以AlGaAs激光二极管泵浦的Nd:YAG激光器,而产生532nm绿色激光和355nm紫外激光用作卫星对地面的距离测量,它产生的1064nm红外激光用作卫星高度测量。预研表明,EOS-ALT卫星对地的激光测距精度可以达到±5~10mm,致使地面上几百千米的站间距离能够达到毫米量级的测量精度。而实现精确测量地球动态参数的目的。 * a; s" U, B1 o7 v9 ^6 G6 K
依据双色激光测定大气折射改正的成功实践,笔者提出用双色激光测定光速在海水中传播的实时速度,进而用激光测距和BDS测量相结合的新方法,精确测定水下拖体的实时位置。为此,在测量船上安设BDS/双色激光测距系统,而在水下拖体上设置激光后向反射镜阵列。依现行水下定位的实际作业可见,水下拖体的作业水域是:陆架作业水深为200m以内,陆坡作业水深为3500m以内,大洋作业水深为6000m以上。由此可见,船载双色激光测距分系统的作用距离,应不低于20km,这对于带合作目标的激光测距,是易于实现的。船载BDS信号接收机,用于测定测量船的实时三维坐标,以此作为已知值,与船载双色激光测距分系统测得的船至拖体的距离,协同解算出水下拖体的位置。根据我们在中国境内在国内8个地区共222010km2的航摄测区,为航空摄影测量制图进行了100多飞行架次的机载GPS动态载波相位测量的生产实践实用表明,水下拖体的点位测量精度不会低于亚米级。船载BDS/双色激光测距系统的优点是:仅一种设备,就能够解决深浅海域的水下精确定位,省时、省力、省经费,开创水下精确定位的科技新途径。
. ~& X& X# @7 | 此外,笔者还提出了如图4所示的“机载北斗/ 激光测深快速跟踪潜艇位置报告系统”。鉴于你懂的,只能够给出它的方框图,而不能够予以详述。
1 K+ m) q: A& C9 i' L% K) _ 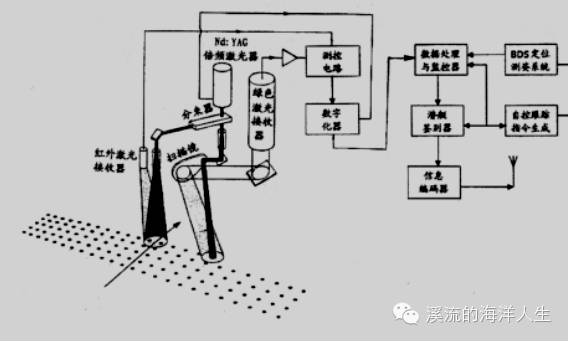
s ?- J6 H2 x7 N
图4 机载北斗/激光测深快速跟踪潜艇位置报告系统示意图 * z% f, ~, U4 q
机载北斗/激光测深快速跟踪潜艇位置报告系统具有“四快”和“四准确”的特性。它的“四快”是:①快速搜索,每小时可对几十平方千米甚至百余平方千米的海域实施地毯式探潜扫描,②快速定位,每秒钟能给出飞机在航飞行的10个以上实时点位,③快速处理,机载数据处理子系统能实时地处理机载测深数据、机载BDS定位和测姿数据,而生成所需的报告电文,④快速报告,机载无线电通讯设备及时地将所探潜艇的位置文件发送给地面指挥中心。它的“四准确”是:①准确测定所探潜艇的在航实时点位,②准确报告所探潜艇的所在海域方位,③准确跟踪所探潜艇的续航方向,④准确夜航赴指定海域实施探潜作业。 四、结束语
/ x* r' I$ s- c) F% q& I" z 我国是一个海域辽阔、岛屿众多、海岸线漫长的海洋国家。海洋测绘是开发海洋资源和维护国家安全的一项基础性工作,在海上交通,海洋地质勘探海洋资源开发,海洋工程建设,海底电缆和管道的敷设,海洋疆界的勘定,海洋环境保护中,海洋测绘又是一项前期性工作。在北斗卫星导航系统成功运行至今,笔者基于自20世纪80年代以来对GPS卫星导航定位/卫星激光测距技术的研究及其获奖成果,提出北斗卫星导航信号与激光测距的协同应用建议:多个BDS基准站的机载激光测深/BDS定位测量方案,用于海底定位的船载DBDS/激光测距协同系统,船载BDS/双色激光测距系统,机载北斗/激光测深快速跟踪潜艇位置报告系统。 9 |. [4 q& y3 L" Q
' b0 e: X; i$ d! s ■作者简介:刘基余,1936年出生,男,教授,博士生导师,武汉大学测绘学院,美国纽约科学院外籍院士,中国电子学会会士,主要从事GNSS卫星导航定位和卫星激光测距技术研究,发表研究论文280余篇。
& K2 e/ Q# Y+ g9 D i* ` 资料来源于《中国测绘地理信息学会海洋测绘专业委员会第二十七届海洋测绘综合性学术研讨会论文集》,版权归《海洋测绘》所有。其他平台如要转载,请备注作者与出处。
! _3 S- G% y0 Q) q' F 
5 m9 d0 J6 ~9 A/ h. D- @* q# M
( f( j$ _& j5 z( z5 U; ^2 ^
( U4 N- b& d: E2 N; `0 f9 M
# y @: N& a, n1 D* r
) q R, V, X% r, W/ K. G6 ^ ^ | 

