 点击上方“溪流之海洋人生”即可订阅哦 点击上方“溪流之海洋人生”即可订阅哦深海蕴藏着丰富的生物资源、矿产资源、可再生能源和空间资源等。面对资源日趋减少的现状,世界各国都将深海资源开发作为重点任务。水下机器人作为一类新型的深海装备,将人类的视野延伸到了深海海底。水下机器人是一种可在水下移动、具有视觉和感知系统、通过遥控/自主操作方式、使用机械手、传感器、搭载设备完成水下任务的装置,可以实现高精度水下观测和调查作业。水下机器人的种类很多,主要分为有缆遥控水下机器人(ROV)、无缆水下机器人(AUV)和载人潜水器(HOV)3类。其中,ROV因其海底作业灵活性强、环境适应性好、作业效率高、经济性好等优点,在深海调查与工程中得到广泛应用,如大洋科学考察、海底生物的观测和研究、冰下观察、海底剖面测绘、海底取样、海洋设施安装水下支持,以及海洋设施水下检测及海管海缆铺设支持等。 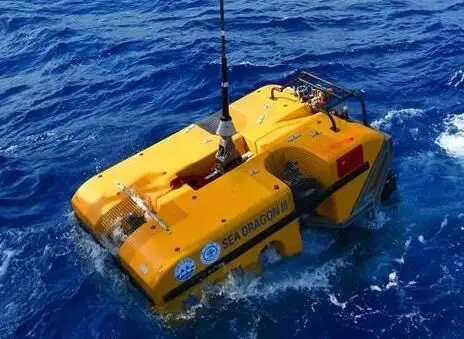  ' \7 T& F: e1 e: d ' \7 T& F: e1 e: d
一、深海ROV国内外发展现状  0 E5 P6 v7 h) p8 e( w
0 E5 P6 v7 h) p8 e( w 水下机器人是一种技术密集度高、系统性强的工程,主要包括仿真、智能控制、水下目标探测与识别、水下导航(定位)、通信、能源系统六大技术。近年来,世界各国走向深海的战略使得水下机器人快速发展。目前,在深海ROV技术研究方面,日本的万米级ROV“Kaiko”号(已丢失)、法国Ifremer与德国、英国的相关机构合作设计制造的Victor 6000、英国的Isis、俄罗斯Okeangeofizika研究院研制的RTM6000、美国WHOI 研制的6000m级Jason 2/Medea、加拿大海洋科学研究所研制的5000m级ROPOS等是深海最具代表性的工作级ROV,居于世界领先地位。 $ _4 l Z2 b4 b
从总体上看,我国的海洋技术发展水平与世界海洋强国存在很大差距,尤其是在深海技术和装备方面,无法满足我国开发深海资源、拓展生存和发展空间的战略需求。我国的水下机器人研究与开发起步较晚,最初主要通过吸收和引进国外先进技术来研发设备。进入21世纪后,我国的水下机器人研究发展迅速,逐渐实现ROV的自主研发,能够研制大中小各型ROV,突破了原有浅水型号的局限,向深水大洋调查和作业迈进。特殊的深水环境对通信和操控系统具有较高的要求。张光义等对水下安全检测和作业型机器人的整套系统组成及原理进行了阐述,验证了模型控制系统的稳定性、可靠性和实时性。曾俊宝等针对50kg级便携式自主水下机器人(AUV)展开研究,介绍了一种采用多种通信方式的控制系统。张玮康等针对无人水下机器人(UUV)的回收任务要求,研制开发新式腹部作业型水下遥控机器人(ROV)。目前,国内只有为数不多的ROV可在水深超过4000m的深水进行作业,代表产品主要有上海交通大学研制的6000m级“海龙Ⅲ”号、4500m级“海马”号ROV,中科院沈阳自动化研究所研制的“海星6000”ROV,广州海洋地质调查局的4000m级的“海狮号”ROV等。但与ROV技术先进的国家相比,我国的水下机器人在一些关键部件和关键材料的研究方面还存在一定的差距,诸多关键技术和关键部件仍被国外发达国家垄断,要实现技术的产业化,还需重点在于基础材料、重要组部件、各种高精度探测设备和传感器等方面加大研发力度和投入。 6 k+ [! F$ [3 l; x6 w# Y
二、“海龙Ⅲ”号ROV
% j& h5 T9 c" _$ ]+ J# M" J: b" W 北海海洋技术保障中心以深海ROV作为观测平台开展了多种形式的水下调查。其中包括针对大洋科学调查应用设计的3500m级“海龙Ⅱ”号水下机器人,已在“大洋一号”船应用8a时间(图1)。由于大洋科学调查任务趋向于多样化,调查航次也逐步增多,对ROV 的应用需求已开始从传统的、简单的精细调查观测向复杂、多样化的精细调查取样转变,要求ROV具有更强的作业能力和搭载能力。受之前研发技术的局限,“海龙Ⅱ”号水下机器人在实际应用中在作业工具接口、高清高速设备搭载等方面的能力有限,无法满足大洋调查新的作业需求,急需进行技术的升级换代。因此针对这些问题,上海交通大学新研发了6000m级工作型“海龙Ⅲ”号ROV,2018年通过大洋48航次的海试和应用,成功完成了4500m下潜试验(图2)。  3 n8 X: r U8 a/ o. l 3 n8 X: r U8 a/ o. l
图1 “海龙Ⅱ”号ROV 图2 “海龙Ⅲ”号ROV
' P8 ^6 M7 Z. I; A ⒈系统简介 ; z: S* u4 l8 ?5 G2 A. I3 p
“海龙Ⅲ”号ROV系统功率160,纵向和侧向推力达到1000kg;采用单机双泵系统,具有丰富的用户接口和强大的设备搭载能力,可以搭载宏吸式取样器、深海小型钻机等重型取样作业工具和各种高速网络接口的科学调查设备;具有强大的海底勘探、调查和取样能力,通过搭载的高清摄像机和照相机进行近底高清观测,利用机械手完成水下精细取样和辅助作业;同时,ROV还配置了光纤惯性组合导航系统,具备海底精细巡线调查能力,能够降低操作手作业负担,提升海底勘探和调查效率。
6 @8 J ~9 ]; E* m+ r6 b- o ⒉系统构成 - p, P# ?" [0 i; `( v# u
“海龙Ⅲ”号ROV作业系统由作业母船(“大洋一号”船)、ROV本体、甲板集中控制集装箱、水面监控动力站、甲板支撑系统,以及搭载于ROV系统上的作业工具组成(图3)。  ) }1 |( N3 u; U1 X' { ) }1 |( N3 u; U1 X' {
图3 “海龙Ⅲ”号ROV系统构成 6 J: O% b- m2 B1 t7 F" e I- _/ N$ d
⑴ROV本体主要由浮力材料、防碰框架、推进器等构成,是水下作业设备的载体(图4)。水下作业设备包括各种常规传感器(深度计、高度计、姿态传感器、导航单元等)、水下摄像机、水下照明灯、声学系统等。在取样作业方面,“海龙Ⅲ”左舷配置了五功能开关式液压机械手,操作简单、夹持力大,主要用于实施ROV作业的定位和抓取较大样品的功能需求;右舷配置一只七功能主从式液压机械手,操作精度高、作业灵活,主要用于定点精细采样作业,可以满足海底多种形式的作业需求。  5 c6 x, D7 Y% } 5 c6 x, D7 Y% }
图4 “海龙Ⅲ”号ROV本体基本构成
. Y1 P3 J: C2 b2 n ⑵甲板集中控制集装箱是ROV系统的动力和控制中心,主要包括主控计算机、操控平台、跟踪定位设备、视频摄录设备及供电模块,提供水面供电、控制和信息综合集成显示功能。
% T6 d! h( v4 p0 c* y ⑶甲板支撑系统包括绞车、脐带缆、升沉补偿装置、A 型架、ROV导接头、液压泵站等,用于投放和回收水下机器人。ROV绞车是“大洋一号”船的固定搭载设备,采用全电动驱动方式,具有主动升沉补偿(Active Heave Compen,AHC)功能,目前配备了4800m的脐带缆,满足ROV系统4500m以浅的作业需求。脐带缆是ROV吊放承重、水下动力传输和通信的桥梁,可用于传输控制台的动力电源、控制信号,以及返回图像信息;较其他海龙系列ROV,“海龙Ⅲ”号ROV采用无中继器方式布放。
3 t2 w& V0 P* J' N* a; g$ F. t, w2 ~ ⑷作业工具:可以搭载宏吸式取样器、深海小型钻机等重型取样作业工具和各种接口的科学调查设备。 , v0 T# V# I0 ~2 a; M: f: C
三、ROV深海探测试验应用
T$ ]7 K; T C! O* L$ ^# | ROV系统海试主要包括码头、浅水区和深水区功能和性能测试。为了安全、科学地完成海上试验,试验采取分阶段、由浅入深的方式逐步开展。本文以实际操作“海龙Ⅲ”号ROV 搭载“大洋一号”船执行的2018年南海综合海试和48航次为例,介绍深海ROV的试验和应用作业过程。 J& B g) E- `8 f. P8 i& M2 y8 V
⒈系统码头调试
" D2 P: G: }. A6 w$ j1 A 码头调试是深海ROV系统试验和应用的一个关键环节。“海龙Ⅲ”号ROV在完成了一系列实验室试验后,开始装船进行码头的系统集成和联调,包括动力启动试验、承重试验、系统功能测试、组合惯导陆上校准功能测试、工具搭载与测试;进而开展码头下水试验,包括航行试验、工具搭载与试验、升降机布放试验以及布放、回收操作流程演练。 $ B; B& k. W9 `) G8 I% f9 l
⒉浅水区适应性功能测试
6 S: [7 ]7 q6 F; F; }/ F 深海ROV在执行深海任务前,在浅水区完成一系列的试验性布放,验证系统基本功能的有效性,同时对于ROV的布放、支持母船的配合等方面都具有十分重要意义。这些工作一般在航渡期间完成,择机选择海底环境、海况良好的海域,搭载各式取样器完成浅水功能性试验、航行试验、自动控制试验等。因为“海龙Ⅲ”号ROV是首次进行海试,必须经过一系列严格的海上试验,试验选取了深度约400m的海域进行了近底布放,到达预定深度,依次检查各子系统功能,检测的参数主要包括ROV系统的传感器、通信、液压系统压力、姿态传感器等系统功能;水下定向、定深、定高自动航行功能;推进器、机械手、云台等液压执行机构的控制及驱动性能;各配置传感器和取样器的作业功能,以及近底巡线试验等。经过浅水区4个潜次的试验和数据分析,证明了“海龙Ⅲ”ROV系统总体功能良好,各配置传感器功能稳定,航行自动控制性能良好,液压执行机构的控制及驱动性能稳定。 5 N2 ^# S: n8 o8 w' C
⒊深海区功能试验
* K: F& W' K# K# K6 b “海龙Ⅲ”ROV的深海区试验主要任务是检验ROV在深水下的定向、定高、定深航行能力、海底作业能力,以及测试其与升降机协调作业能力,这也是此次海上试验的重点。其首次深海试验是在水深1690m处完成了系统全功能测试与演练,对海试所有试验项目进行了测试和验证,如图5~图6所示。  1 R4 n* X0 q% C- ]) { 1 R4 n* X0 q% C- ]) {
图5 运动控制功能测试  , C1 ^2 e; V7 G- N8 W
, C1 ^2 e; V7 G- N8 W 图6 近底巡线系列测试(每格尺度=5m)
' f& G* ^4 p' q. ? ⑴测试了ROV的基本自动控制功能,ROV浮游到达预定深度,在近海底依次完成各自动控制功能测试,包括纵横倾调节、速度预测控制模式,以及定向、定高、定深等常规运动控制功能,用仪器连续记录试验过程中航速、艏向角、纵倾角和深度等参数,同步手动记录数据,分析基本自动控制功能的有效性。
/ {3 N' z- ?2 ~+ u. v3 V( |' ]1 C ⑵重点测试了定深、定高模式下的矩形、梳型、五边形近底巡线功能:预输入巡线轨迹,在近海底切入巡线控制模式,记录航行数据,同步记录数据,分析其巡线控制功能的有效性。 : l" u" V+ O ]+ O
⑶进行了近底高清观测,获得了高品质的近海底作业高清录像和照相资料。 3 x1 c% J9 @1 ~% j: }8 X# |
⑷在海底进行了机械手和取样机构(沉积物/海水保压取样器、宏生物取样器、水下切割工具)的测试和操作,获得了丰富的样品。 5 \) b5 z' R3 O$ ~5 W) Q$ ^# w
总之,验证了“海龙Ⅲ”号ROV深海良好的航行机动性、自主航行适应性、强大和高效的海底观测、取样和作业能力。 ' m! Z8 E# E6 Q2 z2 y5 c
⒋深海观测和取样
' w3 i- Q2 ?% W# Z# d: C+ z. @4 ? 深海系统ROV 在科考中的一个重要应用是开展定点的海底精细观测和取样,如图7~图8所示,通过照片拍摄或视频的方式,对海底地形地貌进行近底实时、直观、精细的调查和观测,利用机械手或配套取样工具进行精准取样作业。本次“大洋48航次”的深海试验性应用的最大潜深为4500m级,即试验性应用下潜,对西太平洋海山区典型地质、生物和环境的精细调查。共完成22次座底,36次悬停观测,累计近底16h,单次近底工作最长6.5h,完成了5km近底测线观测作业。  4 T a& k2 r* L0 @, X
4 T a& k2 r* L0 @, X 图7 海底生物高清观测与拍照  ! A9 V5 j( d) t, g
! A9 V5 j( d) t, g 图8 海底精细取样
0 q$ [6 Y [6 q/ ]6 }" }2 A/ \/ S 在深海观测取样方面,“海龙Ⅲ”号ROV装配的11个高清摄像头,能够满足深海观测、拍摄像功能,可以实现大跨度、长距离近底观测取样;同时,ROV在水下完成了定点取样、标识物投放、近底长距离观测、拍照摄像等功能目标任务,具备深海定位、精细化作业能力,配备宏吸式取样器、岩石切割机、沉积物保压取样器等设备,成功采集到结壳和结核样品,以及海绵、海百合、红珊瑚等6类生物样品,观测到生物个体1280余项,采集到生物样品12例,结核结壳样品6.53kg。为资源勘查和科学研究获取了第一手重要资料,成为大洋科考不可替代的重要装备。 5 L% \: q; G: r; _7 ]0 h
试验性应用结果表明“海龙Ⅲ”号ROV达到了在4500m级深海海底作业的各项技术性能设计要求,为以后的应用航次奠定了基础。 , ~+ W3 `* Q# T- H) T- m3 z* u
四、讨论和总结
c3 _5 U, ~1 [4 d @4 U# s* D “海龙Ⅲ”号ROV的海试和试验性应用共完成了5个潜次的海上试验,并在48航次中完成了5个深海站位的应用,最大潜深4266m,包括2条大深度、长距离、长时间的近底测线观测取样站位,验证了系统在不同深度、不同地形条件下的观测取样作业能力。经过海上功能测试和试验性应用,“海龙Ⅲ”号ROV性能状态稳定、作业模式成熟、取样手段丰富、本体操控娴熟,能够适应多种水深和地形环境。其作业水深、功率配置、水下运动能力、搭载能力等关键性能指标已接近国际水平。这证明我国在深海作业型ROV 自主研发方面取得了实质性突破。 0 {$ x# s2 k% q& c
⑴在功率配置方面,“海龙Ⅲ”配备了160马力强大的动力和良好的机动性。与“海龙Ⅱ”相比具有更强的推力和运行速度,可以有效提高作业效率20%。在实际操作中,遇到复杂地形可以迅速地做出应变,能大大增加ROV的作业安全性,特别适用于深海复杂的海底结构。 ; E% s3 F. Z( G& C C
⑵在作业水深方面,“海龙Ⅲ”的设计水深6000m,基本上覆盖了中国主要海域和国际海域资源可开发的深度。
* f4 Y" p5 W6 a% x2 l1 z1 t ⑶在运动控制方面,“海龙Ⅲ”具备常规潜器所拥有的自动定向、自动定深、自动定高功能,并开发了ROV悬停定位与巡线控制系统,能够实现强干扰力环境下精确定位,可以更有效地支持海底精细探测。 ( H/ R! M& u3 ~
⑷在搭载能力方面:“海龙Ⅲ”具有丰富的用户接口和强大的设备搭载能力,以支持搭载多种调查设备和重型取样工具。 ; s. e- q7 J/ K$ p; L" c, ^8 j
⑸通过海龙系列ROV系统的海上应用,形成了ROV 安全布放与操作的工作流程和工作方法。
# f' ~' z0 ], ] 但是,由于海底作业环境复杂,携带的作业工具经常在海底与岩石发生碰撞,对作业工具的损伤较为严重,因此合理操作七功能机械手、加强取样器的防护等措施,将是后续应用中需要重点考虑和解决的问题。此外,在作业效率和取样及监测工具的多样化上还有一定的差距。如ROV搭载的宏吸式取样器,尽管在水下取样非常高效,但在防生物逃逸机构和取样篮容积方面尚有改进空间。 b- ^6 F/ i. e6 v p- x
“海龙Ⅲ”号ROV在大洋航次中成功的试验性应用,是我国高科技科研成果在深海应用并取得突破性成果的成功范例,对于提升我国大深度ROV设计建造和试验应用水平具有重要意义,将对我国深海科学研究、深海资源探查与开发、国产海洋装备产业化起到推进作用。 3 Z9 B, I# q* m( N$ m* Y
【作者简介】本文作者/任峰 张莹 张丽婷 孙元宏 孙嘉蔚 宋帅,均来自自然资源部北海海洋技术保障中心。第一作者任峰,1982年出生,男,工程师,主要研究方向为海洋调查技术保障;通讯作者张丽婷,1982年出生,女,硕士,高级工程师,主要研究方向为海洋调查高新技术。文章来自《海洋技术学报》(2019年第2期),参考文献略,用于学习与交流,版权归作者及出版社共同拥有,转载也请备注由“溪流之海洋人生”微信公众平台整理。    1 G/ T* ?3 x3 f
1 G/ T* ?3 x3 f 相关阅读推荐
# u: i# F: D- N: `: h9 { 科技前沿▏载人潜水器发展现状及趋势 4 t$ X# S* n* j4 j/ C3 ?/ m+ V7 o. ~
军事技术▏国外水下预置无人作战装备研究 h' d2 ~' j0 @. ^8 D4 z# ]/ a
深渊科考▏深渊着陆器技术研究及马里亚纳海沟科考应用 - X% j3 k2 \2 o: a8 N- J* O' U+ j
知识窗▏“科学”号上的七件高科技“武器” ' ?. Y* i* S4 C) w9 Q6 |0 E- F
科技动态▏深海小型爬行机器人研究现状
$ P+ G D6 U) @/ x F 海洋技术▏高精度和高分辨率水下地形地貌探测技术综述      1 o) \8 U/ V$ D% n 1 o) \8 U/ V$ D% n
公众号 ! {! A7 e5 Z. F5 \) C
溪流之海洋人生
/ l& r- a; b1 i& J0 F 微信号▏xiliu92899  : a/ C% Q* s. {( V' r0 L- y V
: a/ C% Q* s. {( V' r0 L- y V 用专业精神创造价值 7 r9 s5 F: t$ [: a" N
用人文关怀引发共鸣 您的关注就是我们前行的动力 # A! b/ k. D! C0 G7 h% F
投稿邮箱▏452218808@qq.com   8 E5 }6 c# h+ X' U* v5 x P4 k9 _
" N+ o% n. d: ^4 f: w& E) l2 o
6 i7 N& D3 w+ {3 Z
* T$ g) G. ^9 U. _; v/ f; P- L; q* [ 8 E5 }6 c# h+ X' U* v5 x P4 k9 _
" N+ o% n. d: ^4 f: w& E) l2 o
6 i7 N& D3 w+ {3 Z
* T$ g) G. ^9 U. _; v/ f; P- L; q* [
| 

