 8 V$ d) a% t3 p! l; r! g, Z8 g
8 V$ d) a% t3 p! l; r! g, Z8 g 水下无人系统学报 7 F- w" [2 k) B, o+ E& E' I
Journal of Unmanned Undersea Systems
5 V# z9 K4 N5 I! R7 b 2023年第4期  - M- ^. e4 I5 Z. r+ Y% D s9 }7 V
- M- ^. e4 I5 Z. r+ Y% D s9 }7 V 基于单目相机的深海微地形地貌高精度三维重建 ?' |+ [7 s7 ]( e6 ~! Q8 `
署名作者: * w3 z+ H2 @5 `
曹又文1, 2, 刘庆省1, 2, 魏自浩1, 张喜林2, 孙治雷2, 卢泽宇1, 3, 郭金家1
$ I# ]. t2 k/ A) G4 O9 C 作者单位: 7 F! Y% U9 @) K- n4 D
; i5 J5 B* Y0 z% D, C$ I
1. 中国海洋大学 物理与光电工程学院, 山东 青岛, 266100; 2. 青岛海洋地质研究所 自然资源部天然气水合物重点实验室, 山东 青岛, 266237; 3. 青岛海洋科技中心, 山东 青岛, 266237 ( r+ s7 U( m3 U2 w* g4 U+ |
基金项目:国家重点研发计划项目(2022YFC2807700); 崂山实验室科技创新项目(LSKJ202203500).  : I1 q1 F0 R/ l : I1 q1 F0 R/ l
阅读原文
5 _8 w% H% A+ _- U; G$ `) ~8 a 基于单目相机的深海微地形地貌高精度三维重建.pdf
, ~$ c1 {' d+ i 摘要
0 }) H/ |7 h- P j; S 在深海矿产资源勘查和极端环境探测中, 利用光学相机搭载水下移动平台获取海底的光学影像资料成为当前深海精细探测的重要方式。文中针对深海微地形地貌的高精度探测需求, 开展了基于单目相机的深海微地形地貌高精度三维重建方法研究。通过水下遥控航行器搭载的单目相机, 获取了我国海域水合物赋存区的大量图像, 基于此, 利用运动恢复结构方法建立了典型海域内沙波区、碳酸盐岩区和冷泉区的海底三维模型, 精细刻画出区域内的地形地貌特征和生物生态信息。研究结果表明, 文中方法可为深海表生矿产资源勘查和极端环境探测提供重要支撑。 5 M9 y {) q- ?: U
7 C: h2 Q2 c& }6 `/ N7 \ 引言 ! H$ C; ]- ^& f R$ _) Y0 S
近年来, 光学三维成像技术在海洋矿产资源勘查和极端环境探测中逐渐受到重视, 主要包括距离选通法[1]、结构光法[2]、激光雷达法[3]、立体视觉法[4]和运动恢复结构(structure from motion, SFM)法[5]等。从水下应用状况来看, 对于海底地形地貌精细测绘, 使用单目光学相机搭载于水下移动平台以获取海底的光学影像资料仍是目前的主流方式。相较于双目或多个光学相机而言, 单目相机在实际探测过程中成本较低、易于使用, 且不需要特别校准。 " ^# K8 u: [3 V! \9 c' P$ J$ o
借助一些外部辅助设备和图像处理方法, 单目相机可以间接实现成像目标的三维重建, 基于单目相机的光学三维重建方法可分为主动式和被动式2种[6]。其中主动式三维重建常使用激光作为照明光源, 而被动式三维重建采用的是普通白光照明光源。被动式三维重建方法可进一步分为2种, 一是使用预先校准的设备, 将2个或多个相机放置在目标物体周围固定位置, 这种方法在水下尤其是在深海中实施比较困难; 另一种是SFM方法, 该方法使用1部相机从不同方向拍摄同一场景的连续照片, 不需要地理参考目标和额外的硬件支持, 利用重叠图片上的二维特征集合来恢复三维相机运动和三维场景结构。因其可以通过低廉的成本获得高分辨率的地形数据, 已被广泛应用于各种地理测绘中, 如监测沙丘移动和海滩变化[7]、冰川动力学分析测绘[8]、河流地形[9]、滑坡测绘[10]及土壤侵蚀[11]等。
3 g8 M1 w% x( ]- d. [5 A 在海洋环境中, SFM方法常被用于从自主水下航行器(autonomous undersea vehicle, AUV)或水下遥控航行器(remotely operated vehicle, ROV)上获取的视频数据来进行高分辨率海底三维重建, 如Robert等[12]基于ROV获取的视频影像资料, 使用SFM方法对海底峡谷的悬崖进行精细刻画, 重建了非常细腻的地形图, 并利用这些数据进一步调查了深海珊瑚和冷水珊瑚的分布; Teague等[13]采用ROV单目相机的视频资料, 对希腊米洛斯岛古乔里湾周围的浅层热液喷口进行了三维重建, 开展了不同范围的底栖生物栖息地的调查; Wright等[14]构建的SeaArray摄影测量系统对水下考古遗址进行了测绘评估, 通过与实时运动学标记方法、手工地图绘制方法的比较, 验证了SFM方法在水下场景测绘中的高效性与准确性, 典型的测绘结果表明SFM模型的水下测绘精度可达5 cm左右; Burns等[15]则将SFM方法与地理空间软件相结合, 用于夏威夷群岛珊瑚礁的三维建模, 并通过其与珊瑚活体的对比, 分析了珊瑚生态系统的健康状态。上述研究中SFM算法的实现大都基于商业化图像处理软件Agisoft PhotoScan, 封闭的软件环境限制了SFM算法改进优化的可能性。
8 T, s# d4 M, c; Z! _" A& A 随着国内水下运载平台的快速发展, 基于单目相机的海底调查研究已有很多报道, 但目前多采用视频图像拼接, 即通过多幅图像获得更大范围的二维图像, 如在我国南海北部冷泉区“探索4500”AUV通过搭载光学相机拍摄了一系列海底图像, 经过处理后获得了全景高分辨率地图[16]。然而, 基于单目相机的三维重建报道较少, 文中针对单目相机获取的海底光学图像, 开展了图像增强和三维重建方法研究, 完成了深海微地形地貌和生物生态、矿物岩石等信息的三维重建, 支撑了我国水合物矿区的精细调查工作。 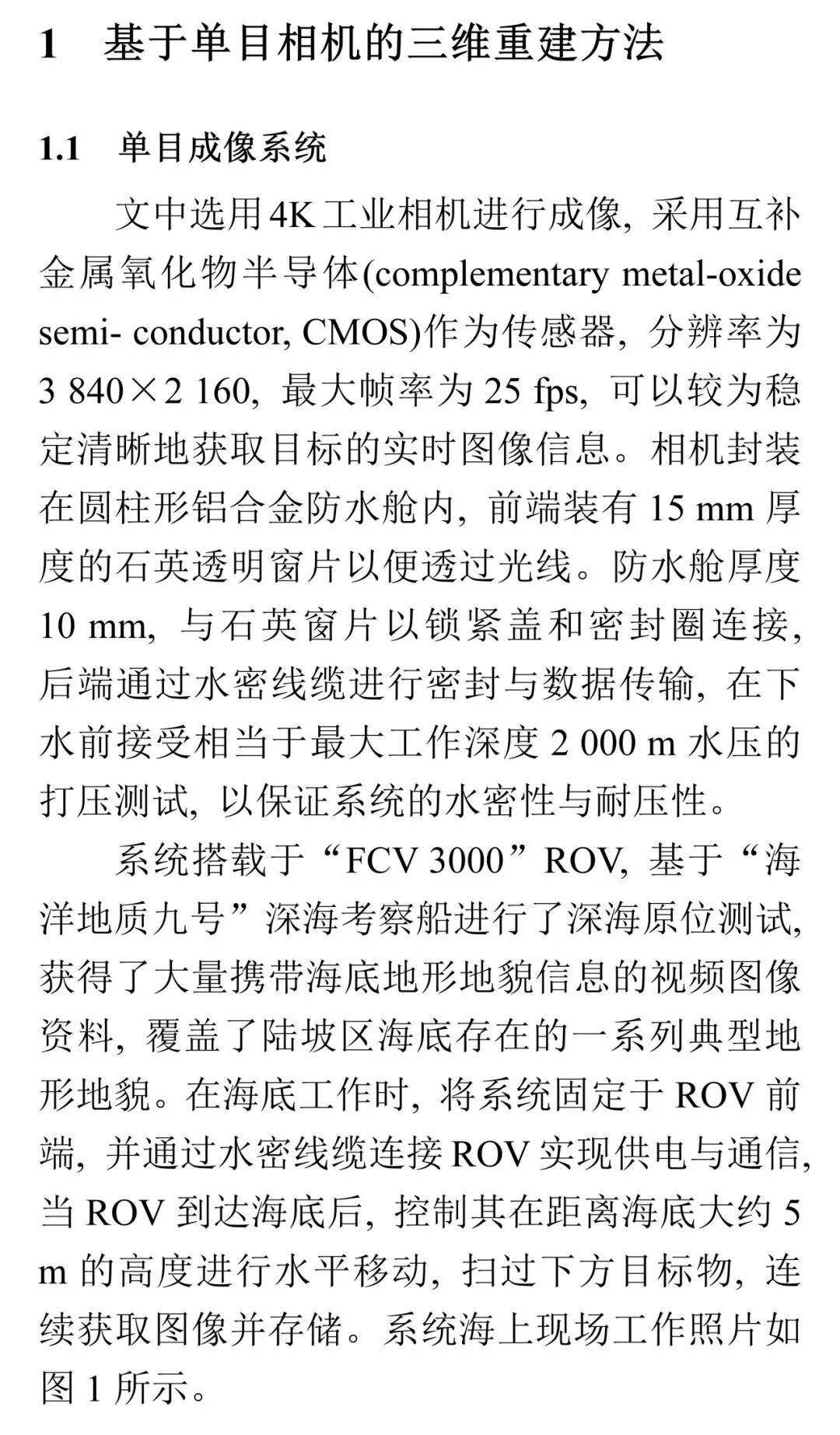 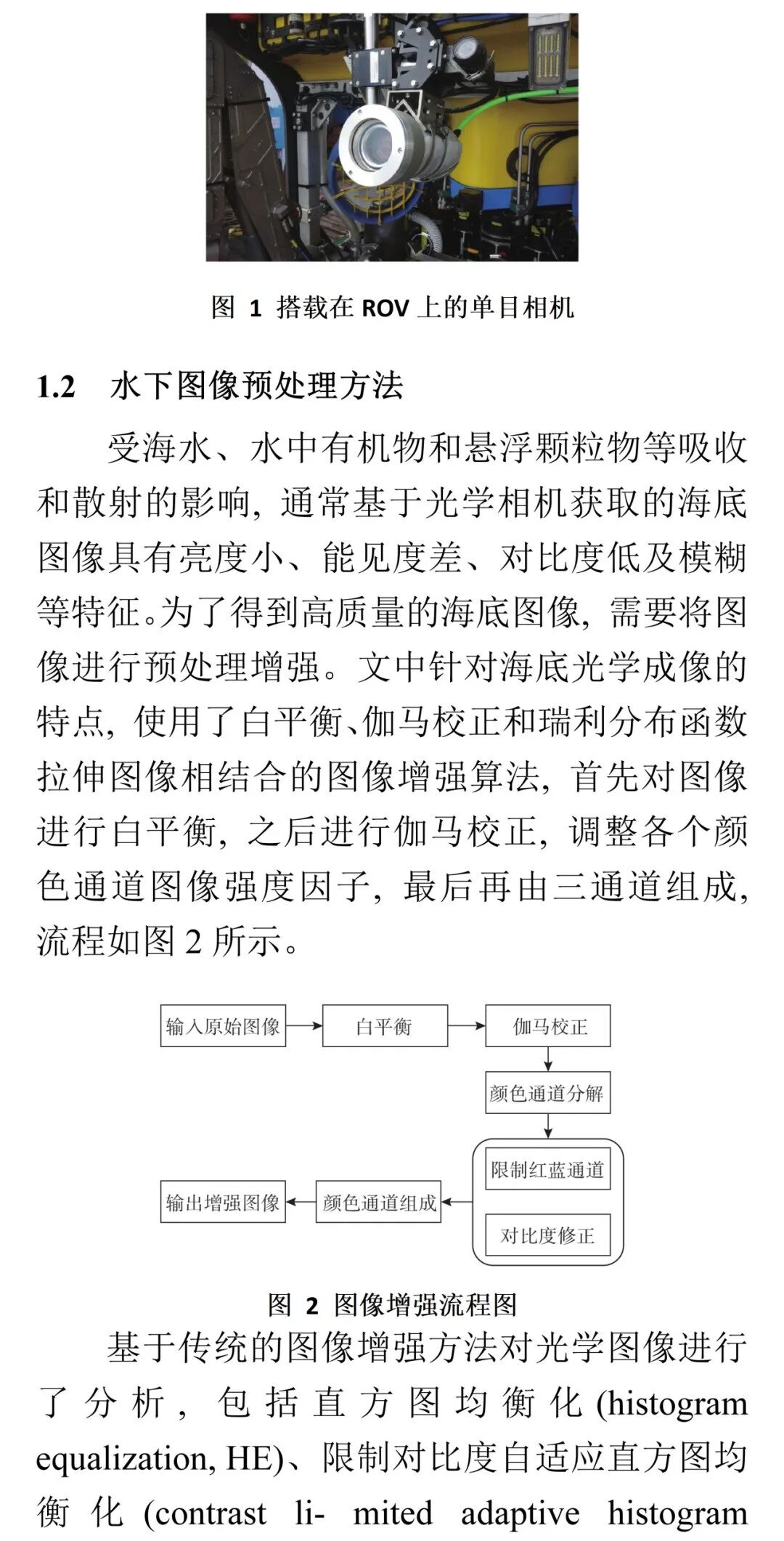 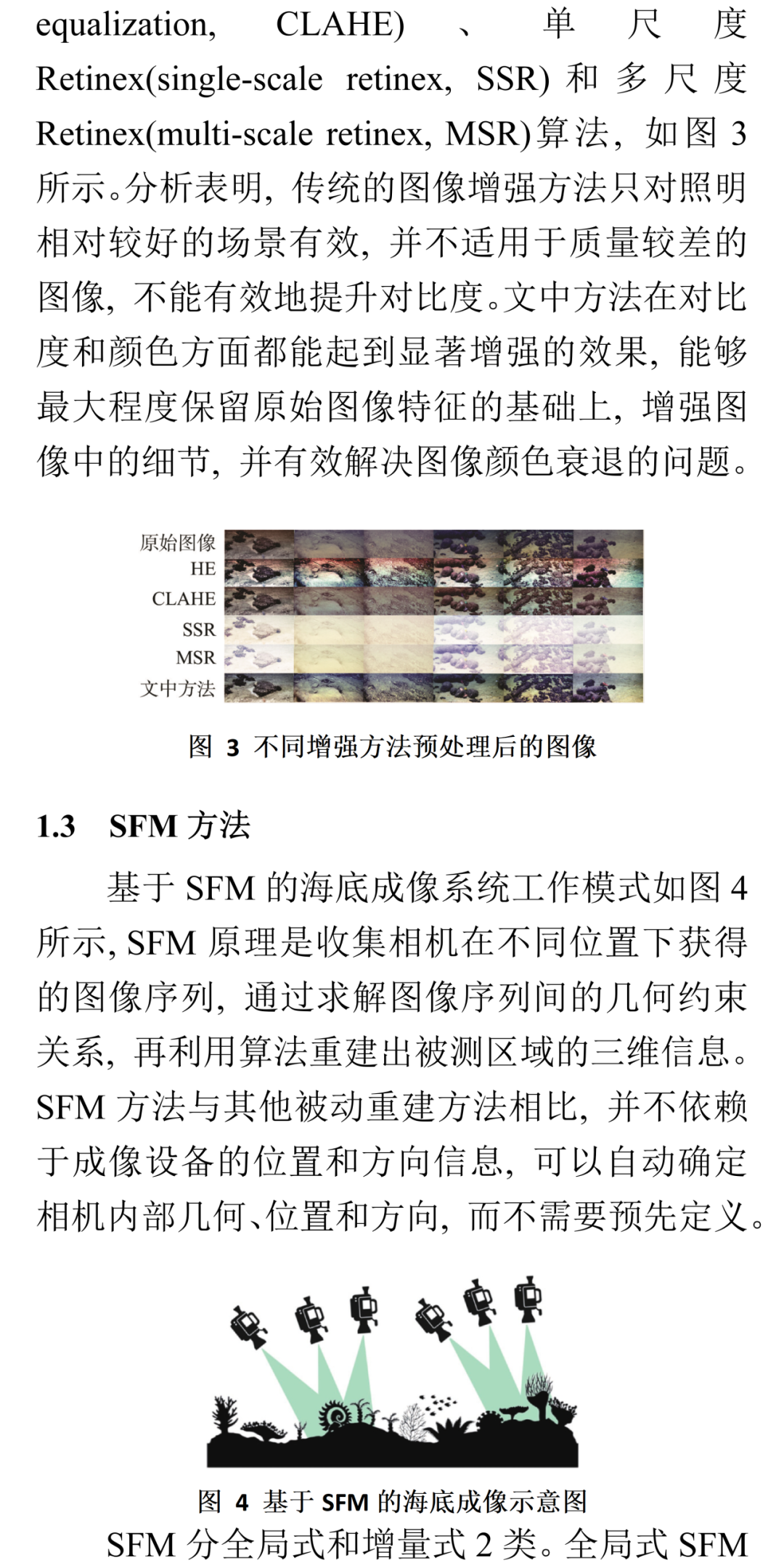   fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) 9 r+ A2 j3 d9 ]. l6 f0 T, D
9 r+ A2 j3 d9 ]. l6 f0 T, D 结束语 2 M. w9 r5 `$ O- ~" E3 C2 ^+ E
文中针对深海微地形地貌高精度三维重建需求, 搭建了ROV深海光学单目成像系统, 针对获取的深海典型区域内的海底光学图像, 开展了海底图像增强和基于SFM的三维重建方法研究。并在重点海域水合物赋存区进行了验证, 精细地刻画出了区域内的微地形地貌特征、生物生态以及矿体特征等信息, 结果表明, 该方法为深海典型勘探区域的海底微地形地貌高精度三维重建提供了实用的技术方案。
+ K8 s. T& ? \" n9 n' k2 r. N 后续将进一步使用标准物体进行系统精度测试评估, 并采用点云分割与配准等点云处理算法来更好地对获取到的三维信息进行展示与分析。同时, 也考虑将激光线扫描获取的点云形式的海底三维灰度信息和单目相机获取的光学数据进行联合研究, 促使深度信息与色彩信息的融合, 进而提高海底三维重建的精度。
" b+ z7 y* Z$ B/ g' C1 R7 H) u END ' n& N% ~6 N1 ]
参考文献略 Z2 Q6 \2 O8 B* E/ h
文章有删减,原文刊登于《水下无人系统学报》2023年第31卷第4期,点击阅读原文可查看。 b9 O/ g4 V6 J4 l* U3 u
联系我们
J" I) B1 S8 o1 X7 f# @ 地址:陕西省西安市锦业路96号
, l# G. ^% X& ^* M 电话:029-88327279 - s+ y. u& G8 q x4 R
邮箱:bianjibu705@sohu.com 网址:sxwrxtxb.xml-journal.net
; I3 ?/ |% i: w4 M4 j' ^4 ~& Y; m! H- t* o
) A* m" e! @- g! Y
( J" @/ N: G# }2 k& a( _' R1 w+ T0 H5 p2 q7 u& @' V
|


