|
11月7日至19日,“探索二号”科考船携深海浮游式移动作业平台(ROV)和中继器赴南海开展TS2-19航次,该平台完成了由浅到深3个级别(1500米,2500米和4500米)的海上试验,最大工作深度达到4308米。该平台在海试过程中工作正常,各项指标达到设计目标,顺利完成海试验证,结果表明该系统具备初步的作业能力,可以承担深海科考、工程作业等任务。 该航次由深海所、长春光学精密机械与物理研究所,海南狮子鱼深海技术有限公司,哈尔滨工程大学共4家单位参与实施,主要任务是开展中科院战略性先导科技A类专项“深海/深渊智能技术及海底原位科学实验站”所研制的系列装备的海试任务,参试装备包括浮游式移动作业平台(ROV)、中继器、深海生物基因测序仪等。3 y5 |# y' h4 X4 G* ^' V$ D. @* @8 g
6 O: j0 `) K7 f' d
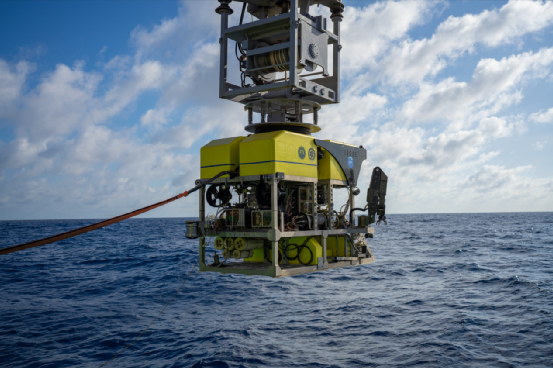
深海浮游式移动作业平台(ROV)
! f+ N9 p$ U g9 e- o: N U 深海浮游式移动作业平台是深海所独立研发的首台ROV。该装备以“探索二号”船为作业母船、以科学考察、工程应用、应急救援为主要作业任务,可提供液压、电力、通信、监控及控制等多种通用接口,方便搭载各种作业工具及模块开展深海海底科学考察和工程作业,其设计水深为6000米。该装备大量采用自研部件,如多功能阀箱、模拟摄像头、网络摄像头、SDI摄像头、4K高清相机、水下LED灯、云台等。其他主要部件都采用国产解决方案,如推进器、水密接插件、浮力材、油泵等。 ) Z2 e/ A5 o7 R, o0 C6 P
) G+ B( A) n2 G+ x# v
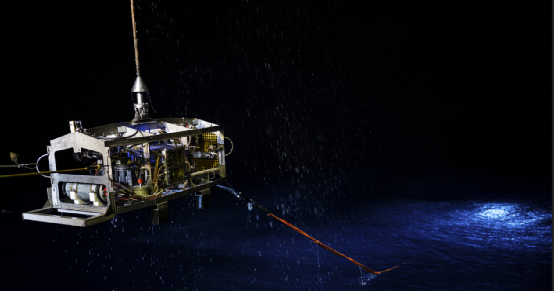
中继器 . n# z8 H9 D, w1 Q( o
本次试验采用的中继器是中国科学院深海科学与工程研究所转让技术、江苏新航船舶科技有限公司研制,最大工作水深为6000米,可提供电力、通信等多种通用接口,能搭载或者挂载多种类型的装备、仪器、模块开展深海作业,如电视抓斗、科学类仪器等。该装备曾经搭载电视抓斗在应急救援航次中发挥了重要作用,充分验证了其各方面性能。 0 x6 P# @1 O9 `1 e1 d4 k5 m6 o6 ~
3 Y+ Y% U @0 _* R1 h2 r
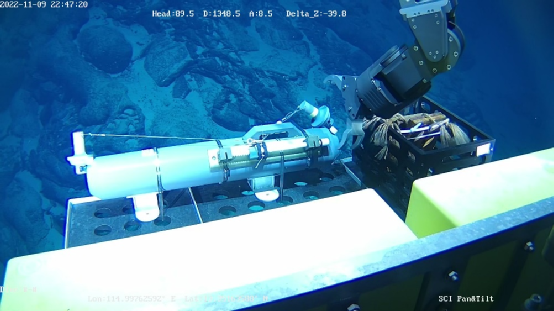
ROV机械手操作取水器 ; y D. a) L. C- k
在本航次中,“探索二号”船通过光电复合铠装缆连接至中继器,再通过非金属轻质光电复合脐带缆连接至ROV。中继器与ROV组成柔性连接的分体式系统,该系统进行了4500米级海上试验应用,有效验证了“中继器-ROV”的分体式布放-回收方案及测试流程,以及ROV各分系统及模块的设计性能指标,并充分测试了ROV在4500米级大工作深度下的综合作业能力,如定高、定深、定向、定速、样品抓取收集等。
Q0 p7 z& {* C$ X D' E# c+ b 
1 f5 [* G8 S8 a7 }& L! u" z
深海浮游式系统作业平台显控中心
# L% h7 \6 z5 Y, q6 @; A3 B2 a 该分体式系统与基于“探索二号”船的,具备供配电、甲板操作控制、视频监控等功能的水面控制单元组成一个完整的作业系统。整个系统可作为“探索二号”船的常用科考作业工具,能配合“探索二号”船完成更多深海科考任务,全面提升“探索二号”船的作业能力。 1 ]& B; ^; e- @/ [1 h" }
 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) 7 E0 n, h* F+ }
深海原位生物基因测序仪
8 P2 |5 s1 N% i+ \- V$ V+ a3 @ 本航次还进行了深海原位生物基因测序仪的1800米功能性海上试验。该设备由中国科学院长春光学精密机械与物理研究所研制,并由深海所完成其水下化封装。该设备搭载中继器下放至1800米深度,并成功进行了自带生物样品的测序和分析,为下一步与其它高性能生物类仪器联合开展深海原位环境下的生物探测及分析打下了良好的基础。 本文由中科院深海所深海资源开发研究室提供。+ _ T8 P# S& z x" Y: ?2 @

- |0 }: ^" p: ^! e* I( t* b
分享:点击右上角图标分享给好友或朋友圈
* _% u" n7 s! d# a) C* q 订阅:搜索“深海所”或扫描下方二维码 3 y! ~" ]; i- z- }
官网:http://www.idsse.cas.cn/ ; s# {: V3 i' Y: C. q

2 ^; p- ^1 F5 D( H4 e. V, e* e; S: `1 V1 @
! L: m* q5 F2 p- X9 V
/ N$ P2 N8 B5 U2 Z: l1 v4 t: t+ o3 [9 W$ I* e" w
| 

