|
^6 M4 Y7 h0 @1 E
% i# k5 `; u0 u# ^ 1 ]$ H; Z- I* P1 J5 q$ G
导读 : Q2 G( k& f. T, Z; b+ b) }( f% y
生活在海洋中层水域的浮游动物体每天都上演着地球上规模最大的迁徙,这种迁徙每天发生两次。但是目前人们关于中层水域发生的事情知之甚少,于此科学家们利用水下航行器新技术揭秘海洋“暮光地带”,对再中水层繁衍的动物进行了追踪研究,并发表在SCIENCE ROBOTICS期刊上。该论文题目为《一种用于海洋暮光地带多学科调查的混合水下机器人(A hybrid underwater robot for multidisciplinary investigation of theocean twilight zone)》。论文链接: ( G3 ^) K. [$ B0 o$ E
https://robotics.sciencemag.org/content/6/55/eabe1901 $ w1 L- d8 o+ F
▍迁徙动物对气候的影响
2 o% Y9 H; g! K; i8 f5 E# S 海洋中深层水为水深200米~700米之间的海水,是一个只有百分之一的环境光线能够到达的区域。虽然该水域没有足够的光来支持光合作用,但它仍然是许多动物的家园,包括钻光鱼、水滴鱼,动物发光水母和巨型鱿鱼等。近年来,科学家们发现这片广阔的区域承载着丰富的生命,这些生命在全球碳循环中扮演着关键的角色。
# A$ q F% X- M" ^/ z, o0 o
! n' V4 K5 j* e9 Q6 j4 y0 d 海洋深处的暮光地带 - x) R4 d8 \+ W2 }$ k
; \8 _) I& v8 B& M3 ^
海洋中水层存在着大量昼伏夜出的迁徙动物 + N5 R" R/ y; o- m% q0 j/ W
海洋中水层是一个具有巨大科学、商业、环境和军事潜力的领域。为了避免捕食,许多中水层动物白天在数百米深的地方度过,夜间上升到近地表水域在黑暗的掩护下进行觅食,最后在黎明时分下降到更安全、更黑的水域。当这些动物在水面附近觅食,然后在它们撤退到更深的水中后排泄时,它们将有机碳从浅水带到深水中,所以将碳元素从近地表水转移到深海。这种“昼夜垂直迁移”这个过程阻止了在海洋表面被捕获的碳重回大气,在全球碳循环中发挥着关键作用。 8 [3 E4 v. q# ^9 E9 W" f
5 d" b5 r+ l9 i# h% |
温室气体排放造成地球气温升高 * N& ^! c8 h3 y# e; @; \! D
在探索中层水域的生态系统方面,使用传统的设备和工具有点力不从心,船载声学传感器虽然能利用声波定位物体,但无法精确探则在海洋深处游动的动物体;拖网作业可能将在中层水域繁衍的凝胶状动物解体;由于很多动物能够发光(如光睑鲷,龙头鱼,灯眼鱼,光头鱼,甲藻,发光水母等),因此对它们的捕捞容易在捕获的过程中把其他动物吓跑。而且,拖网产生的压力波对于这些动物来说也是一种“打扰”。 4 T3 C A0 r( p! ~, D
! o _ g9 E+ v
就目前而言,任何海洋航行器都会在一定程度上破坏生态环境。所以斯坦福大学和德克萨斯州里奥格兰德河谷大学的科学家自2017年以来一直在研发水下航行器,在对生态环境影响最小的同时,此来观测中水层的动物。 6 Y, y9 F4 q" N; u: C
▍Mesobot为人们对海洋中水层动物研究提供可能性
0 a; D/ w1 m7 r& N- Z 在2020年,由蒙特利湾水族馆研究所(MBARI),伍兹霍尔海洋研究所(WHOI)和其他合作伙伴开发出了一款半自动深海航行器。这款深海航行器取名为Mesobot,旨在研究海洋中层水域“暮光地带”,目前已在加利福尼亚州蒙特利湾完成海上试验。 8 i/ [$ i$ `3 v ]: M8 v
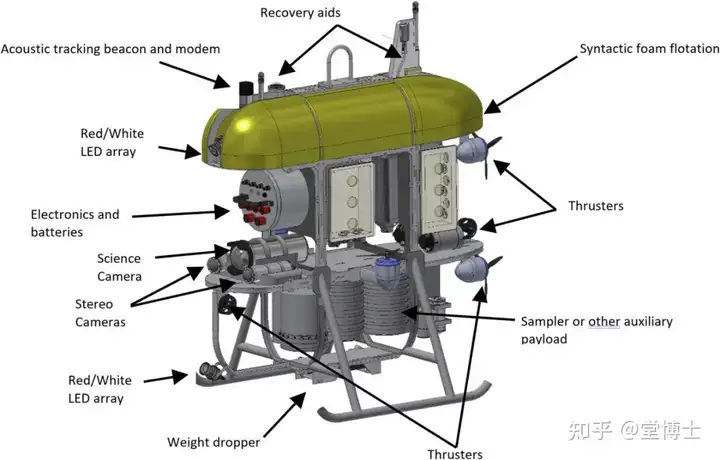
深海航行器Mesobot高 1.5 m,重约 250kg,上面安装了照相机、声学传感器和取样器。就航行器的本质而言,Mesobot是一个系绳航行器,在达到其工作水域前使用光纤电缆从地面控制和供电。
. D. f9 w1 c9 \3 t- f! ^9 S 9 q V# @* N- D5 R: B& r2 q
深海航行器Mesobot的结构及其搭配装置
5 q2 Y2 r( v' y$ y: h$ K0 n5 X 首先,Mesobot顶端被涂成亮黄色,以便科学家容易定位。Mesobot还带有一个全球定位系统 (GPS),还配备了无线网络连接,当Mesobot在距离海面控制船 1 公里的范围内,它会自动连接到船上网络,则可以读取得到Mesobot的定位。在观测装置的配备上,Mesobot 的搭载了Sony UMC-SC3A相机,提供高质量的4K高分辨率视频和图像,配备全画幅 35 毫米传感器。这款相机在 12 V的直流电压下消耗约 6 W,并且搭配了一枚微距镜头。 y: X% A' J9 _" {- ~' x3 I
许多海洋中水层的动物(包括鱼类和无脊椎动物),对水的扰动具有高度敏感性。传统的水下航行器运动时会产生激流波,这些动物感受到激流波后,即使在黑暗中也能做出逃逸的行为,影响了其繁衍作息。而Mesobot采用了大型慢转螺旋桨,可以产生较少的噪音,在动力上最大程度减小了对生态环境上的影响。同时,Mesobot所有的推进器,安装在可调节的支架上,以便它们自然地产生解耦运动。为了使Mesobot可以追踪和研究“暮光地带”内的浮游和漂流动物。
, I0 h: ?% K% R7 b a# w# g& j" ` 在续航方向上,Mesobot 携带一个额定容量约为 4.5 kWh 的锂离子电池组,在潜水主动追踪阶段Mesobot的平均功耗为 93 W,因此重达 250 公斤的Mesobot工作时间可以超过24小时,为研究海洋的中水层的研究人员提供了很多有价值的信息。
7 {3 U3 X6 n' \ 科学家们在研究船Rachel Carson所停靠的蒙特利湾进行为期三天的海上试验,美国蒙特雷湾 200 米深处自动追踪自由游动的水母和巨大型幼海鞘。这些测试包括五次深度达数百米的下潜,同时有助于测试航行器的潜航能力。通过试验发现,科学家们研制的Mesobot 能够在美国蒙特雷湾 200 米深处自动追踪自由游动的水母和巨大型幼海鞘,能够调查和追踪缓慢移动的深海动物,并将动物的运动与关键的环境测量相关联。 6 H3 `& {1 k% t& h |* u' e7 Q
1 K) }) N) l9 C9 B' K& r+ l
科学家们利用Mesobot对深海中水层进行开发和进行动物追踪
2 \. V4 _$ n8 ^9 { ▍科学家们用Mesobot对海洋被猎杀者们进行了追踪研究6 D, v) T! r8 ?* y
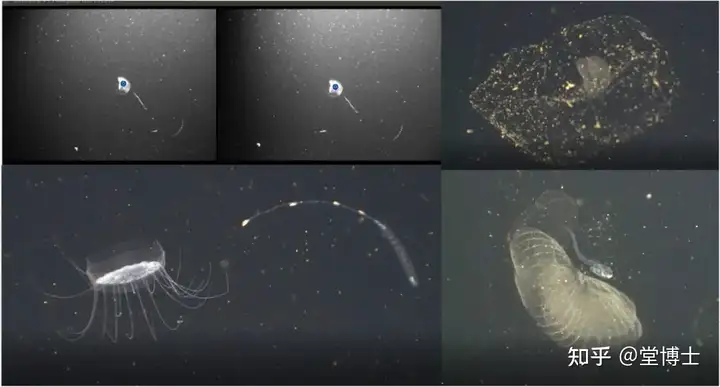
在达到 200 m 的作业深度后,科学家们操控Mesobot开始搜索目标,Mesobot所配备的科学相机也记录并展示了海雪颗粒,巨大型幼海鞘和水母(图4)。
. R1 \7 x: B) e, y 科学家们发现,在下降的过程中,水母以 3.5 cm/s 的平均下降速度进行运动。在用Mesobot对水母的追踪过程中,科学家们发现水母的觅食行为,它们会使用有毒的触手进行捕捉猎物。在视频中的某个时刻,水母的触手接触了一只双小水母(一种已知的水母的猎物),但最终双小水母逃逸了。而科学家们通过Mesobot观测到了巨大型幼海鞘,以及它们正在通过内壁排水以进行滤食。
- b0 I0 Z. d1 ^ 4 o5 o3 T# X4 X0 [
Mesobot对动物的实施追踪图像;左上:Mesobot追踪水母时的场景,蓝点表示选定的目标;左下:Mesobot在追踪餐盘水母正在捕食双小水母;右上:巨大型幼海鞘的外粘膜;右下:巨大型幼海鞘和它的“内壁” $ C! N1 z! B0 W) [, ]1 A# l
( H: c8 e* U# y) z
! }3 R2 t! P3 J8 X8 }
; v1 e3 [$ ]0 ~/ d (a)
5 F( ~9 y' [/ \% ~, S% W
$ O; w3 G& D$ ~+ ?+ c+ Y . u' O( ?. u+ q
: E6 i5 f( d1 K: V; e (b)
! A/ u0 E, [' W; @ c+ F3 j+ x" g( Q: Q- C
8 Y% W, Z7 k. w
! `+ W* f& r* o. u (c)
; S) q7 {: x9 F8 t P Mesobot对正在起舞的水母进行追踪 0 E6 \0 J& `! T p$ p1 `, i# ~0 m
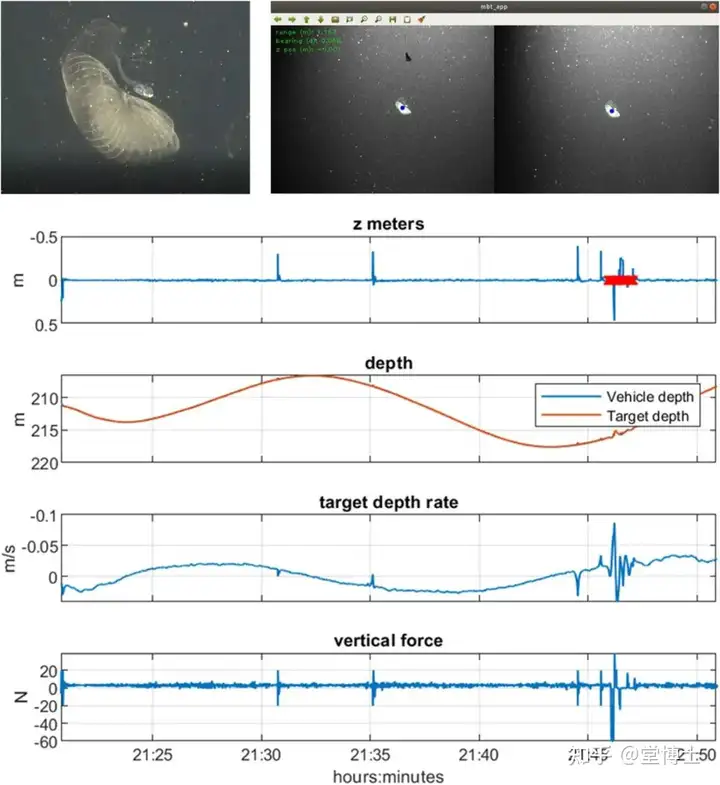
与此同时,科学家们还利用Meshobot追踪了一个巨大型幼海鞘,这种动物的部分时间的运动方式都是跟随海洋进行被动漂流,外形呈透明的蝌蚪状。在观测到遇到巨大型幼海鞘后,科学家控制Mesobot小心翼翼地接近,并进行了几分钟的自动追踪。虽然幼海鞘其本身体形很小(约9cm长),但它们却被直径达几十厘米的蛋白质和纤维素团包围着。
2 W2 I% p0 y& d! m3 ?: Z% X6 O' x+ U 这种生物产生这些蛋白质和纤维素团是为了诱捕海洋中的微生物,它们将其过滤进来。当蛋白质和纤维素团的过滤器阻塞之后,这种生物就会将其抛弃再产生一个新的,有时只需要数小时。其近亲海鞘一般不足3厘米,但这种幼海鞘能将营养物质以及将排泄物中的碳运输到深海(尤其是它们可以随时放弃蛋白质和纤维素团),因此在海洋里扮演着非常重要的角色。科学家们发现,被动漂流的巨大型幼海鞘在约 20 分钟的时间内上升和下降的范围在6 m。 5 c- a3 R% T5 |
这项追踪研究还证实了在研究海洋的过程中直接观察的重要性。同时,验证了Mesobot能够在动物进行日常迁移和其他日常运动时对其进行研究,且能够进行实时追踪。 5 N; s. ^' n' B2 Q. _
; }. W% T! E, \/ E
* t3 m3 h( ?3 t ; p. k. _6 K4 b% y; c) f' }
Mesobot 对一只巨大型幼海鞘(像一只小蝌蚪)进行追踪
! i5 N* U# J# r6 M5 c; z. b: s & E+ m0 ~! M; K$ y/ n8 P) I8 A* J
Mesobot在30 分钟内对巨大型幼海鞘时的追踪结果 7 Z, {( \4 @' D% U d- w( v
▍研究机构介绍5 s! h, ]& a* w
位于美国马萨诸塞州的伍兹霍尔海洋研究所,其前身是1888年在伍兹霍尔建立的海洋动物研究所,是美国大西洋海岸的综合性海洋科学研究机构,也是世界上最大的私立的、非盈利性质的海洋工程教育研究机构。该研究所研究课题广泛,涉及海洋基础学科和海洋工程各个方面。在海洋动物研究,北大西洋洋流、墨西哥湾流与西部边界流以及大涡旋的研究,深海大环流模拟等方面取得了重大成果。
- ]+ z1 T$ J) p; O
, a! V) s% t& D$ ?: t
" B& h3 t4 d6 A6 i% D( I1 f) m4 h2 d' h. l9 d( N
' i3 b7 P& P- F, ~$ }1 S |