|
* m5 G$ R- v' F7 U2 X
摘要:习近平总书记在视察青岛海洋科学与技术试点国家实验室时强调,建设海洋强国,必须进一步关心海洋、认识海洋、经略海洋,加快海洋科技创新步伐。随着海洋强国建设的不断推进,进一步提升我国的全球海洋观测能力显得越来越重要,要求加快建设海洋观测网,为海洋生态保护、海洋防灾减灾、应对海洋气候变化、保障海洋经济安全、参与全球海洋治理等方面提供重要技术支撑。本文通过研究世界典型国家海洋观测网建设情况,对比我国海洋观测网建设现状,分析我国海洋观测网建设中存在的问题,并提出相关对策建议。 # z4 N* P: x) m3 q- c9 y# Y; z
关键字:海洋强国;海洋观测网;  5 Q8 \0 J6 I4 E1 u. t 5 Q8 \0 J6 I4 E1 u. t
党的十八大做出了维护国家海洋权益,建设海洋强国的重大部署,党的十九大报告又一次明确坚持陆海统筹,加快建设海洋强国的目标。建设海洋观测网是实施海洋强国战略的一项重要基础工作,为加快推进海洋观测网建设,国家“十三五”规划中明确提出,要统筹规划国家海洋观(监)测网布局,推进国家海洋环境实时在线监控系统和海外观(监)测站点建设,逐步形成全球海洋立体观(监)测系统,加强对海洋生态、洋流、海洋气象等观测研究。联合国政府间海洋学委员会于 1993年牵头组织和实施了全球海洋观测系统计划,美国、欧洲各国、日本等国家和地区凭借在海洋观测领域的先发优势,纷纷投入巨资开展海洋观测网络关键技术研究,构建海洋观测网络,以海洋观测网络为平台的科学、技术和国防安全的国际竞争日渐激烈。 / o9 l3 o% Y- C# Z9 M! D
01 / l) _9 c3 W. `' M* ^- c
世界典型国家海洋观测网建设现状 (一)美国海洋观测网美国是最早开展海洋观测研究和建设的国家,早在冷战时期美国海军就开始了海洋网络的研究和应用。早期美国建立的海洋观测系统有 SOSUS,LEO-15,H2O 等,但它们都是单一科学节点的海洋观测系统。1998 年,美国提出了“海王星”海洋观测网络计划(the North East Pacific Time—Integrated Undersea NetworkedExperiment,简称 NEPTUNE),1999 年 6 月加拿大的科研机构加入其中,海洋观测网络系统正式开始规划实施。为了进行原型实验和技术储备,美国和加拿大分别建立小型实验观测系统 MARS(Monterey AcceleratedResearch System)和 VENUS(Victoria Experimental Network Under the Sea)。
. w) `3 U8 ^, v. G2 R1 h MARS 系统于 2007 年已完成了电力和通信两用光缆的铺设、所有水下观测仪器设备及相关装置的安装,并主要开展水下光缆的供电和数据通信方面的研究。如图 1 所示,MARS 主要由岸基基站、1供电系统、光电复合缆、水下节点(接驳盒)和水下观测仪器组成。MARS 系统部署海域最大水深约900m,在海洋深 1m 的泥层中共埋设 52km 长的光电复合缆,作为能量和数据传输的物理介质。在光电复合缆末端连接一个 4×3.7×1.2m 的主节点,并针对不同的观测项目设置多个次级接驳盒作为枢纽。每个次级接驳盒均搭载多个观测仪器,如 CTD、流速仪等。该网络由岸上基站向各个观测点供应电力,采用岸基高压直流传输方式将 10kV 直流高压电能传输到水下节点中,由高压-中压、中压-低压两级降压模块处理后得到水下设备可用的 375V 和 48V 电能。
& K% S7 m/ K. i! ^0 I 
图 1 MARS 网络结构示意图NEPTUNE 是美国华盛顿大学的约翰·德莱尼和美国著名的伍兹霍尔海洋究所的科学家们于1998 年共同提出的,其后,加拿大的科研机构加入其中。海王星计划在环绕胡安·德·夫卡板块500km×1000km 的海域铺设 3000km 长的海洋光电复合缆,进行为期 25 年的海洋实时观测。观测参数包括深海物理、化学、生物、地质的实时信息,通过光纤传回到岸基基站,并通过互联网传给世界各国的终端。NEPTUNE 的北段由加拿大在其海岸外建设,南段由美国在其海岸外建设。具体的海洋观测网络布局如图 2 所示。
( c. _' f+ }* f _! m+ C4 X, y1 C 
3 A+ K2 D% ~1 B1 C) E 图 2 海王星计划网络布局图 海王星计划主要开展 3 个领域的研究:一是板块构造运动研究,主要用于地震预测、海啸预警及其所产生的影响;二是研究海洋对气候的影响以及南部富氧洋流,用于揭示气候变化的反应及其对生物变化的影响;三是深海生态系统研究,主要观察深海中的生物群落、能量和营养物质的循环途径以及生态系统在自然环境发生变化时的响应。NEPTUNE包括水下部分和陆地部分(如图3所示)。水下部分计划设立 30 个海洋观测节点,每个节点将安装水文仪器、物理化学传感器、水下移动平台、地震仪、海洋钻头等传感器阵列,利用水下光电复合缆组成海洋观测网络,实现与深海环境动力过程的实时交互。水上部分建立岸基基站,负责陆上能源供应、海洋数据接收存储、数据产品发布等。
4 D4 E" T1 K: H" X 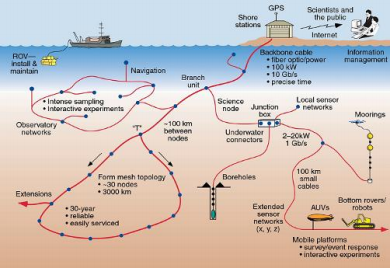
图 3 NEPTUNE 的网络结构示意图
1 \. f3 g/ z4 I! r7 B# ]1 x1 \ 经过多年的方案论证后,美国于 2009 年通过了“海洋观测行动”(ocean observatories initiative,简称 OOI)计划,建设一个基于网络的海洋观测系统(如图 4 所示)。该系统于 2011 年开始布放海洋光电复合缆,计划 2015 年完成整个网络的建设。OOI 充分利用传感器、计算速度、通信带宽、互联网资源、小型化、基因组分析、高清晰成像、机器人和数据同化建模可视化技术等领域的最新发展成果,建立一个传感器分布全球的近实时观测网络。在近海、公海和海洋等位置观测气候变化、生态系统的变化、海洋酸化和碳循环等复杂的海洋过程,提高环境变化预测水平,对生物多样性、海岸生态系统和气候效应研究也具有重要的意义。OOI 共分 3 级,即海岸观测系统、区域观测系统和全球观测系统。 3 I7 q& ?5 \- W, W$ P

图 4 OOI 设备分布图
6 ?9 j: A- D( m- _ OOI 全球观测系统主要是在全球范围内部署浮标系统,用于测量热量、水分和动量等海气通量,整个水柱的物理、生物和化学性质,海洋地球物理观测等,研究海洋对气候变化的应对和作用。这一部分工作由伍兹霍尔海洋研究所、俄勒冈州立大学和斯克里普斯海洋学研究所负责。NEPTUNE 从属于 OOI 区域海洋观测系统,计划在区域海洋中长时间、自适应地观测一系列物理、化学、地质等参量和生物过程,弥补传统的船上观测的缺陷。该部分工作由华盛顿大学负责。OOI 海岸观测系统将加强和扩大现有的沿海观测资产,通过整合锚系浮标、电缆、地面雷达、水下机器人、空中和卫星传感器、船舶等资源,研究大/中尺度的沿海海洋环流极端变化、物料平衡(例如大陆架间的营养和碳通量)、生态系统的稳定性和变化、沿海形态、海滩侵蚀和其他人为尺寸的海陆相互作用。该部分工作由伍兹霍尔海洋研究所、俄勒冈州立大学和斯克里普斯海洋学研究所负责。OOI 通过网络基础设施组件,将以上分布式系统连接起来,形成一个多代理和国际性的观察网格,以创建复杂的实时和离线分析。该部分工作由加州大学圣地亚哥分校负责。 (二)加拿大海洋观测网
" h3 h. z8 P* s- ~- Y# M 加拿大目前正在建设和使用的海洋观测网络系统主要包括 VENUS 和海王星计划加拿大部分(NEPTUECanada)。这两个网络是维多利亚大学的姊妹项目,拥有很多相同的设计理念,很多NEPTUNE Canada 的实验都是在 VENUS 上进行的。2001 年,加拿大维多利亚大学开始主持建立VENUS 计划。2007 年 8 月,VENUS 开始铺设海洋光电缆,11 月完成了第 1 阶段的光电缆铺设和仪器安装,并与 Internet 接通。VENUS 系统分别在维多利亚地区的 Saanich 海湾(约 80m 水深)、Georgia 海峡 170m 和 287m 水深处布设了 3 个节点。Saanich 海湾节点作为一个海洋技术实验平台,可以对海洋观测研究技术、设备进行原形测试,同时也连接有硝酸盐传感器、沉积物捕获器、数字摄像机、回音探测器等仪器设备。在 Georgia 海峡的两个节点上接入了声学分析器、声学多普勒流速剖面仪、溶解氧传感器、浑浊度传感器、水中听音器、CTD 等 10 余种海洋观测设备(如图 5 所示)。VENUS 项目对外开放,全世界的海洋科学家都可以向其提交自己的研究实验计划,并可实时获取研究数据。 ) [( f5 E0 K3 V: R6 M& ~
 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
" \( C8 m6 }# x. f' L
图 5 VENUS 海洋观测网络系统布设示意图 8 f1 {: j$ n8 v9 ^& v( L
NEPTUNE Canada 从 2007 年开始进行海洋光电缆和观测仪器安装铺设,2009 年投入使用,目前已经安装了 5 个水下节点(计划再增加 1 个),成为世界上首个区域光缆海洋观测网络(如图 6 所 示)。全世界的科研人员可以通过互联网实时查询和下载该系统的观测数据。NEPTUNE Canada 的主要研究包括海洋地壳运动、海洋热液活动、海洋过程与气候变化、深海生态系统等。NEPTUNE Canada 从温哥华岛西岸出发,穿过大陆架进入深海平原,向外延伸到大洋中脊的扩张中心,共布设了长达800km 的光电复合缆组成海洋观测骨干网络,整个观测范围为水下 17m~2660m,采用高压直流供电模式,供电能力达到 10kV/60kW,数据传输能力为 10Gb/s。骨干网采用环路拓扑结构,能量和数据可以双向传输,提高了系统的可靠性。 # u8 \! U6 C; i- n4 J
/ X0 j K; O! }4 C 图 6 NEPTUNE Canada 结构示意图 * k; Q# V* ?+ h# \1 ~, _
(三)欧洲海洋观测网 2004 年,欧洲 14 个国家共同制定了“欧洲海洋观测网计划(The European Sea Floor Observatory 6Network,简称 ESONET)”,在大西洋与地中海精选 10 个海区设站建网(如图 7 所示),进行长期的海洋观测。针对从北冰洋到黑海不同海域的科学问题,承担一系列科学研究项目,诸如评估挪威海海冰的变化对深水循环的影响以及监视北大西洋地区的生物多样性和地中海的地震活动等。该计划将涵盖从北冰洋到黑海的所有欧洲水域,也将探寻从冷水珊瑚到泥火山等大量神秘的自然现象。与NEPTUN 不同,ESONET 是由不同地域间的网络系统组成的联合体。该项目将根据实际情况逐渐探求发展完整的网络系统,在 20 年后具备监视整个欧洲周边海域的强大能力。9 A+ H0 A7 X* J7 N0 W
2 \& h3 ]- G0 n/ _( v
图 7 ESONET 观测海域分布图 " q' I) ^6 N9 w0 M1 f7 j* f% q
2002 年~2007 年,欧洲完成了 ESONET-CA 计划,该计划首次对欧洲海洋观测能力进行了评估,允许对 ESONET 的潜在利益相关者进行鉴定,制定了观测节点的第 1 级配置定义。在以上研究的基础上,欧洲于 2007 年~2011 年开展了 ESONET-NoE 计划,目的是推动对环欧洲长期多学科深海观测网络的实施和管理。2007 年开始的欧洲多学科海洋观测计划(European Multidisciplinary Seafloor Observatory,简称 EMOS)[20],计划建立 5 个节点,提升 ESONET 的数据获取能力,预计2016 年进入正式操作阶段。筹备阶段(EMSO-PP)是为期 4 年的项目,其主要目标是建立 EMSO 的法律和管理框架。 (四)日本海洋观测网络 r2 E0 ~2 \: \
DONET 网络是日本开展的海洋观测项目,主要用来实现对地震和海啸的实时连续监测,网络节点的分布如图 8 所示。第 1 阶段从 2006 年开始,2011 年完成建设。该网络以 15km-20km 为间隔,在海洋布置 20 个科学节点,每个科学节点连接多个高精度的海洋地震仪、强震仪、水中地震检波器、温度计和压力传感器等多种海洋观测仪器,监测范围涵盖伊豆半岛近海东南海地震震源区。DONET主干网上可以承载 3kW 电力输送,主干网对每个科学节点的输入功率为 500W,科学节点与基站之间的最高数据传输率达到 600Mbit/s。网络建成后,DONET 数据通常发送到日本气象厅(JMA)和美国国家地球科学和防灾研究所,目前压力表传感器已经用于日本气象厅的海啸警报,并监测到 2011 年日本东太平洋海域地震、2012 年苏门答腊岛北部西海岸的地震、2012 年日本 Sanriku 海岸地震等。 " l# \% J1 ?* x$ S6 i$ r
2012 年,日本在南开震源区开始 DONET2 的建设,主干网络将于 2013 年开始铺设,计划于 2015年完成。 ' P9 |" r( A" u; v# |

2 u$ G8 [% y& p- ]8 X6 J: i& g1 U
图 8 DONET 网络节点分布图
/ z! D e# x1 X 02
5 i. b1 d2 p5 y' T% T' r 我国海洋观测网络建设情况 我国在“十一五”期间开展了海洋长期观测网络关键技术的研究。2009 年 4 月,同济大学等科研单位在上海附近海域进行了海洋观测组网技术的实验,并且建立了中国第一个海洋综合观测实验与示范系统——东海海洋观测小衢山试验站。该试验站由海洋登陆平台及传输控制模块、1.1km 海洋光电复合缆、基站及特种接驳盒组成(如图 9 所示),接驳盒外接 ADCP、CTD、OBS 等多种观测仪器。同济大学等国内高校研制的海洋观测节点在 2011 年 4 月已与美国 MARS 网络并网成功。2011年,山东省科学院海洋仪器仪表研究所在青岛胶州湾海洋岸边试验站开展了海洋观测网络岸边实验。2017 年 5 月,中国国家海底科学观测网正式被批复建立,项目总投资超 20 亿元,建设周期五年。2018 年 1 月,我国参与的首个全球实时海洋观测网 Argo 正式建成,主要分布在西北太平洋、中北印度洋和南海海域,基本覆盖了由我国倡导的“21 世纪海上丝绸之路”沿线海域。
. t+ R7 ~5 T7 H1 K5 i, q3 F& q
图 9 小衢山试验站(一)近岸立体示范系统 a) [9 _' k- P# y: u) K1 C+ U
通过集成“863”相关观测装备,在台湾海峡建成一个多平台观测系统组成的区域性海洋环境立体观测和信息服务系统;利用“863”计划发展的船载快速监测系统、航空遥感应用系统、水下无人自动监测站、生态浮标、无人机遥感应用系统等监测手段进行集成,“十五”开始建立了渤海海洋生态环境海空准实时综合监测系统,形成了一个能实时(或准实时)的监测海洋生态环境状况与动态变化、提供实时监测数据和综合信息的监测示范系统。随后,又以上海为中心,建立了覆盖长江三角洲濒临海域的区域性海洋环境立体监测和信息服务示范系统,以广州为中心,在珠江口海域建立了海洋生态环境监测示范试验系统。 (二)近海区域立体观测示范系统- e% m" O& X- p! b
中国科学院在黄海(獐子岛)、东海(舟山)、西沙永兴岛和南沙永暑礁各建一个长期观测浮(潜)标网,与现有的国家近海生态环境监测站—胶州湾生态系统研究站、大亚湾海洋生物综合实验站、海南热带海洋生物实验站,和海洋考察船的断面观测一起,共同构建成点、线、面结合,空间、水面、水体、海底一体化,多要素同步观测,兼有全面调查与专项研究功能的开放性近海海洋观测研究网络,以期推动我国的海洋科学立体观测和研究的发展;国家海洋局在我国近海有实施 17 条长期断面观测,遥感飞机和海洋卫星观测方面也已进行多年。 (三)海底观测网络建设
4 ^9 ]. c; l' L* Z- i& L 在海底观测网方面,就相关技术我国逐步开展了积极探索。在接驳盒技术、供电技术、海底观测组网技术等方面都取得了一定成果。东海小衢山建成,目前正在运行的以太阳能供电的 1km 海底光缆观测站,是我国开展有缆海底观测的有益尝试。2013 年 5 月 11 日建成并投入运行的三亚海底观测示范系统,是我国相对具备较为完整功能的海底观测示范系统。该系统由岸基站、2km 长光电缆、1 个主接驳盒和 1 个次接驳盒、3 套观测设备、1 个声学网关节点与 3 个观测节点构成,具有扩9展功能,如图 1-2-5 所示。系统在高压直流输配电技术、远程直流高压供电技术、水下可插拔连接器应用技术、网络传输与信息融合技术、低功耗高性能水声通信节点、稳健的网络协议、水声通信网与主干网协同机制等核心技术方面取得了突破,对加快建设我国长期海底观测系统、全面提升我国海洋观测能力和设备研发水平具有重大意义。 ' o( N1 B q! V, e# t
03
" Y, X n* j7 o/ H8 ?6 W; H 我国海洋观测网建设存在问题 (一)海洋探测基础研究薄弱, Q$ g2 Q: w! ^) Q. N+ t5 F4 k& ~
在海洋观测网方面,技术起步较晚,尚有很多技术瓶颈和难题,包括低功耗的海底观测仪器、移动观测平台与固定观测平台的联合组网技术等。当前的研究主要还处在观测网的硬件设施建设上面,而对观测网建成后的后续研究尚未开展,譬如如何利用海洋观测网获得更好的数据来研究和揭示海洋现象、如何整合多个局部的海洋观测网络形成全国性、甚至更大范围的观测网络问题等。 , A# F' ]: l% ]$ C B
海底探测基础研究薄弱。在海底固体矿产探测方面,缺乏系列化探测装备,虽然在国际海底发现了三十多处海底热液喷口,但对海底热液喷口的精确定位能力不足,而且受制于海底探测基础理论、调查和评价方法研究基础薄弱,致使深海资源评价技术存在发展瓶颈。尤其是在深海矿产资源开采关键技术方面,国外 20 世纪 70 年代未便完成了 5000m 水深的深海采矿试验,我国 2001 年才进行 135m 深的湖试,而且湖试中实际上对其采集和行走技术的验证并不充分。同时,我国对富钴结壳和海底多金属硫化物矿的采矿方法和装备的研究还仅处于起步阶段。在深海生物基因资源研究方面,与发达国家之间的差距较大,特别是在深海生态观测、精确采样、培养技术与极端微生物资源获取方面;在生物多样性调查方面,我国主要集中在东太平洋多金属结核合同区与西太平洋海山结壳调查区开展了底栖多样性调查,在其他国际海域仅进行了少数几个航段,而且缺乏深海长期生态观测的技术手段。 (二)海洋传感器与通用技术相对落后# {4 q0 ]& Q8 K3 {6 d9 d% h( [
海洋传感器与通用技术制约了我国海洋观测网建设进展。传感器是海洋探测装备的灵魂,虽然我国在海底探测装备集成方面有了突破性的进展,但是在核心传感器方面严重依赖进口。另外,在深海通用技术与材料方面,如浮力材料、能源供给、线缆与水密联接件、液压控制技术、水下驱动与推进单元、信号无线传输等,在探测与作业范围、精度,集成化程度和功率,操作的灵活性、精确性和方便性,使用的长期稳定性和可靠性等方面,差距都还很大。这种情况制约着我国深海探测与作业装备的发展,继而影响资源勘查和开发利用活动的开展,限制了我国深海海上作业的整体水平的提高。 (三)海洋探测装备工程化程度和利用率低4 e1 f* p- j$ L6 i" L
研发相对封闭,与用户需求驱动、成品产业化、构建产业链和商品市场化严重脱节。尽管经过10十多年的努力我国的潜水器技术有了突破性的进展,特别是在 7000 米载人潜水器、海龙 II 型 3500米 ROV、6000 米 AUV 的研制过程中,通过引进、消化和吸收,掌握了一批潜水器关键技术。但是与世界先进国家相比,我国的海洋探测装备技术还处于发展阶段,在工程化、产业化方面有较大差距。我国从事潜水器产品相关服务的公司多位国外产品代理商,大多没有和潜水器技术研究单位组成有效的产品化机制。国外海洋探测装备的发展从研究、开发、生产到服务已形成一套完整的社会分工体系,通过产品产生的利益来促进科研的发展,形成了良性循环;而国内科学研究机构和产业部门之间联系不紧密,尚没有从事产品研发的专业化公司,无法形成协调一致的产业化互动机制,很多研究成果难以真正形成生产力,致使工程化和实用化的进程缓慢,产业化举步维艰,远远不能满足海洋科学研究及海洋开发利用需求。 " s+ ^( r# T, C0 m8 c
同时,由于研究部门分散,大型海洋探测装备参与研制部门过多,探测装备后期保障和维护困难。探测装备研制部门与用户脱节,现有探测装备长期闲置,利用率偏低,技术与科学相互促进能力不足。
: k+ z, n1 j2 \# L, w 04
7 J7 J& p! M$ q9 F8 e! W0 O- T 对加快我国海洋探测网建设的建议 (一)进一步突出国家需求导向2 g: V5 w [# |* l1 Z
海洋科技服务于经济、社会发展和国家权益的国家需求目标更为突出和强化,国家需求成为未来海洋科技发展的强大动力。各国不断加大海洋科技投入,制定海洋科技发展战略,发展海洋高技术,促进国家社会经济发展。各国通过深海探测对国际海底的竞争方兴未艾,美国、日本、俄罗斯、法国、英国等许多国家都把海洋资源的开发和利用定为重要战略任务,竞相制定海洋科技开发规划、战略计划,优先发展深海高新技术,以加快本国海洋开发的进程。当前,围绕北极海域的权益争夺日趋白热化,在中国东海海域的摩擦也不断升级,主要原因是看到了这些海域的巨大经济价值和战略地位。 (二)大力发展深海探测仪器与装备# n0 ^- ~4 Q2 p1 t$ U
海洋通用技术作为水下探测装备的核心部件和关键技术,朝着模块化、标准化、通用化发展。当前,在水下水密接插件方面,已经出现满足不同水深、电压、电流的电气、光纤水密接插件产品;在水下导航与定位方面,IXsea 公司推出了满足水面、水下 3000 米、6000 米分别用于水面舰船、潜艇、ROV、AUV 等不同用途的多种型号水下导航产品;在浮力材料方面,市场上已出现满足不同水深的,用于不同用途,包括无人潜水器、遥控潜水器脐带缆、水下声学专用的浮力材料;在 ROV 作业工具方面,已出现的水下结构物清洗、切割打磨、岩石破碎、钻眼攻丝等专门作业工具;水下高能量密度电池也实现了模块化,无需耐压密封舱就可以直接在水中使用。 8 J2 ]6 a5 \6 D
海洋探测技术装备朝着多样化、多功能等方面发展。当前,用于水文观测的主要有遥感卫星、岸基雷达、潜标、锚定浮标、漂流浮标、Agro 浮标等。尤其是由 Agro 浮标组成的全球性观测网,收集全球海洋上层的海水温、盐度剖面资料,以提高气候预报的精度,有效防御全球日益严重的气候灾害给人类造成的威胁,被誉为“海洋观测手段的一场革命”。在物理海洋探测方面,主要有电、磁、声、光、震等探测平台对海洋地形、地貌、地质及重磁场进行探测。物理海洋探测平台朝着多功能化发展,将浅地层剖面仪、侧扫声纳、摄像系统等组成深海拖体,对海底进行探测。同时,海洋生态探测平台将荧光计、浊度计、硝酸盐传感器、浮游生物计数器及采样器、底质取样器等集成于一体,形成海底化学原位探测与采样装备。 (三)积极拓展无人技术
9 y) ]; M/ }+ |$ o1 N' {# K 经过半个多世纪的发展,ROV 已形成产业规模,并广泛应用于海洋观测和开发作业的各个领域。当前,国际上 ROV 的型号已经达 250 余种,从质量几千克的小型观测 ROV 到超过 20 吨的大型作业型 ROV,有超过 400 家厂商提供各种 ROV 整机、零部件以及服务。遥控潜水器及其配套的作业装备、通用部件已形成完整产业链,有诸多专业提供各类技术、装备和服务的生产厂商。在 AUV 方面,技术趋于成熟,已有 AUV 产品上市。当前,多个系列 AUV 产品面向市场,如美国 Bulefin 机器人公司推出了 4 款 Bluefin 系列 AUV 产品,挪威康斯伯格公司推出了两个系列 8 款 AUV 产品,其中 Remus 系列 5 款,Hugin 系列 3 款 AUV 产品。西屋电气公司预测,未来 10 年全世界将有 1144台 AUV 需求,乐观估计市场额将达到 40 亿美元。
1 N2 f# ^4 Y, `) M, B 随着无人潜水器日趋成熟,基于无人潜水器的海洋探测新技术不断涌现。应用小型 AUV、水下滑翔机组成自适应采样网络对区域性海洋环境进行监测是当前研究热点之一,已有一些系统(如前述的 NJSOS 等)投入示范性应用。AUV 可以携带水体采样装置按照预定算法跟踪温跃层并采集水体样本,或者在漏油事故后自主追踪油液直至找到源头。混合型潜水器结合了 AUV 和 ROV 的技术特长,既可以定点观测作业、也可以在一定范围内走航,在北极冰下、深海热液等极端环境考察与探测中有应用优势。总之,无人潜水器符合海洋探测装备无人化、智能化的发展方向,无人潜水器与海洋探测应用的结合也愈加紧密。 (四)强化多单元、多系统联动& X+ k" \2 g- W4 e* [! W& o0 P5 D( Y
海洋观测正在从单点观测向观测网络方向发展。单点观测海洋观测只能够获得局部的,时空不连续的海洋数据,对海洋规律的认识不够全面,难以深入。由多种海洋观测平台组成的观测网能长期、实时、连续的获取所观测海区海洋环境信息,为认识海洋变化规律,提高对海洋环境和气候变化的预测能力提供实测数据支撑。海洋观测网络整体的发展趋势主要体现在两个方面:从系统规模来说,新的海底观测系统规划的建设规模也越来越大,逐步由点式海底观测站向网络式海底观测系统发展;从系统选址看,海底观测系统建设的地点将逐步完成对重要海域的覆盖,从而为海底地震、海啸观测预警报、海洋物理科学研究及军事应用等提供越来越充足的支持。 ! |8 O, R% ] @) K* s/ G }
遥感卫星、岸基雷达、潜标、锚定浮标、漂流浮标、Agro 浮标、无人潜水器等观测平台与海底观测网相互连接形成立体、实时的海洋环境观测及监测系统,不仅可以对当前状态进行精确描述,而且可以对未来海洋环境进行持续的预测。各国纷纷开发研究海洋技术集成,建立各种专业性海洋观测网络,如日本的海底地震监测网、美国深海实验网、新泽西生态观测网、军事观测网等,并在此基础上构建全局海洋观测网,在大尺度上实现常态化观测,来研究气候变化、海洋环流和生态系统动力学、大气-海洋物质交、海底过程,以及板块级地球动力学。 2 j: e: s3 V4 v9 s* T* B" B
作者简介:
& L) O4 _; _, j) n q2 G 陈书海,男,研究员,中船重工军民融合与国防动员发展研究中心
! u) b6 @7 K3 M+ [ 顾春卫,男,研究员,中船重工军民融合与国防动员发展研究中心
; ?& I# S) C! B
6 t9 Q$ n& [, W
声明:本公众号相关内容均来自主流媒体及公众号,非商业用途,并不意味着赞同其观点或证实其内容的真实性。版权归原作者所有,如有发现侵犯您的权益,请后台联系编辑,我们会尽快删除相关侵权内容。 % k& P. y0 V( W: d. m
) G( c; X$ J' x, j6 ^, X' R1 q; `% q. j/ d# I
( I! a0 L: X: ~+ w+ t8 G! z @& \2 z7 A& ?1 G
| 

