|
电子万花筒平台核心服务 中国最活跃的射频微波天线雷达微信技术群
' P' o" j, W* V 电子猎头:帮助电子工程师实现人生价值! + W1 n ^: x; K. P) K
电子元器件:价格比您现有供应商最少降低5% * Z5 b; I0 V) X9 ~# b& `
声呐技术是指各国海军为提高声呐的探测效能而开发和应用的技术。声呐是利用水中声波对水下目标进行探测、定位和通信的电子设备,是水声学中应用最广泛、最重要的一种装置。声波是人类迄今为止已知可以在海水中远程传播的能量形式,声纳(sonar)产生于第一次世纪大战期间,由声音(sound)、导航(navigation)和测距(ranging)的字头构成的缩写。它利用声波在水下的传播特性,通过电声转换和信息处理,完成对水下目标进行探测、定位和通信,判断海洋中物体的存在、位置及类型,同时也用于水下信息的传输。
0 D7 S0 h* X6 i1 z5 p! _( d 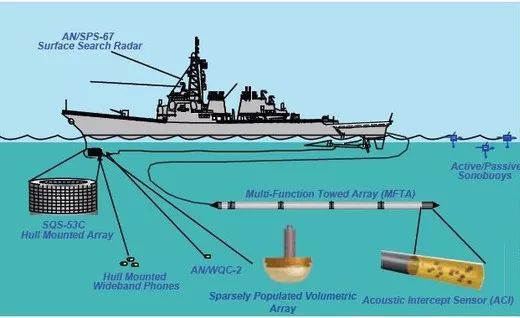
/ L& n5 D0 v; Q! L0 y/ w 水声换能器是声呐系统的重要部件,根据工作状态的不同,可分为两类: 2 ?' M" b* \' \
一类称为发射换能器,它将电能转换为机械能,再转换为声能; ; |3 K5 t/ K9 F( x4 r
0 d* ^- m; ~& Z7 P2 M D% I7 g 另一类称为接收换能器,它将声能转换为机械能,再转换为电能。
% X& M, R2 k$ L6 H# e( V 实际应用中的水声换能器兼有发射和接收两种功能,现代声呐技术对水声发射换能器的要求是:低频、大功率、高效率以及能在深海中工作等特性。 ' h! E. _% b+ ~( w! V0 o
水下声呐技术在军事、海洋测绘、海流流速测量、海洋渔业、水声通信、水下声学定位等领域有着广泛的应用,先进信号处理技术、水声通信和声呐组网技术、被动声呐技术、低频主动声呐技术、爆炸声回波定位技术是声呐技术的主要发展方向,此外,诸如水下声学成像技术、侧扫声呐技术、合成孔径声呐技术等关键技术也是国内外研究的焦点。
5 E8 U O- q) s# ]2 L; n 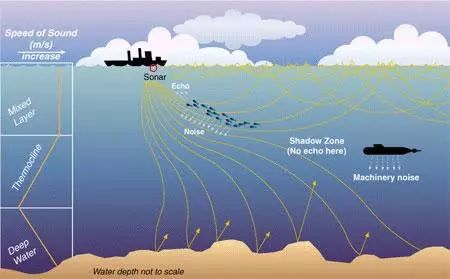
' f( g6 l o) T; y' u! ^ 一、声呐系统分类 $ s9 ]9 w: a6 @% X! j: j" v: G2 W
声呐系统可以从多种角度分类,不同的声呐按照某种分类方法属于一类,而按其他分类方法可能又属于不同的类别。下表为从不同的分类角度介绍的各种声呐的主要特点。
6 A. Z! v# @$ s l3 W( m 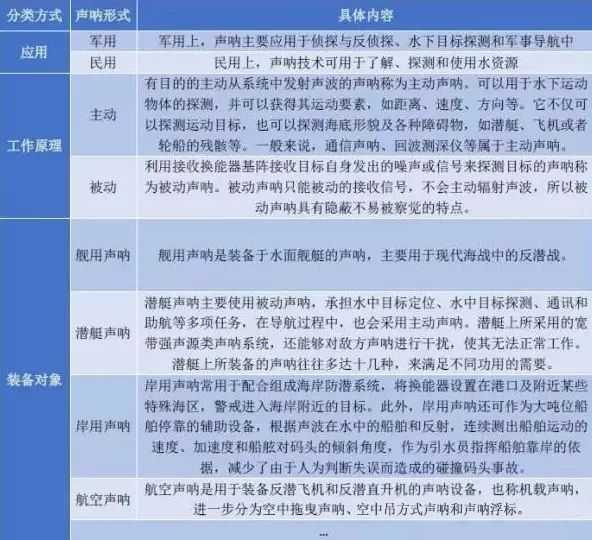
) M. Z, u4 Z4 N
h. j4 k. o2 c
二、典型的声呐系统 4 N o3 m. e+ R! a
目前典型的声呐系统包括拖曳阵声呐、船侧阵声呐、双/多基地声呐、地形地貌探测声呐、小目标成像声呐、合成孔径声呐和通信声呐等。 2 ]: z' `+ U# Z2 @/ z2 i
船侧阵声呐:是将若干个水听器沿艇身侧向排列形成两个线列阵。由于水听器安装在舰船侧面艇壳表面,所以其收放简单,但是其受到本舰艇干扰的影响较大。 9 k3 f1 k6 x+ U0 O1 l
双/多基地声呐:是相对于单基地声呐命名的。双基地或者多基地声呐是主动声呐,它的接收装置和发送装置距离较远。这样的布局使得主动声呐平台可以隐蔽和安全地探测目标。
. N2 C" Y6 k4 p9 ~. C, | 地形地貌探测声呐:海底地形图描绘了海底深度与坐标的关系,而海底地貌图则是表明海底每点的回波信号的强度。
2 f; x; O( N; ^+ p n 合成孔径声呐 (SAS):1960年前后,合成孔径的概念才被引入声呐领域,目的是提高声呐的方位分辨力。其基本原理是利用小尺寸基阵匀速直线运动来虚拟大孔径基阵。但是受环境因素,声呐载体很难实现理想的匀速直线运动,所以相关的成像算法和运动补偿技术较为复杂,是合成孔径声呐的关键技术。 ) t( n+ t: p/ t2 L7 ?; A% b
拖曳阵声呐:也称作拖曳线列阵声呐,将水听器线列阵拖缆拖曳于船尾,并由拖缆收放系统进行姿态控制。 & A7 K9 U2 H9 n; P* Y* s
三、典型的声呐装备 + }& ~! K$ O8 L+ j
⑴美国AN/SQR-19型被动拖曳线列阵声呐) V4 Y3 y" `3 [5 K9 m: t
AN/SQR-19被动拖曳线列阵声呐是在AN/SQR-18的基础上开发的,工作始于1976年。它是由美国西屋电气公司、古尔德公司和通用电气公司协作研制的。到1982年把第一部AN/SQR-19试验样机首次安装于美国海军DD-980 (Moosbmgger) 号导弹驱逐舰上,经试验鉴定后,自1983年开始正式批准生产。1985年7月AN/SQR-19第一套生产样机正式交付使用。
6 }1 U4 m; u: M: b% m0 j
3 d. U6 y! x1 p+ _; |' f 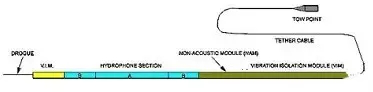
- c/ X) o' B9 b& K5 g
该声呐的主要使命是对潜远距离被动探测、噪声测向、跟踪和识别,对水面舰艇也具有远距离探测能力。在AN/SQQ-89(V) 舰载综合反潜作战系统中,AN/SQR-19承担了大范围远距离初始探测,引导舰载反潜直升机SH-60B迅速飞往目标区域,使用机载探潜设备对潜艇实施精确定位,用机载反潜武器对潜攻击或经数据链给母舰传输目标数据由舰载远程武器对潜攻击。AN/SQR-19还与AN/SQS-53C声呐相互配合,互为补充,保证中、近程对潜探测、跟踪、识别、定位以及武器的使用。 * ]( R" [2 w+ E6 m' A2 ?1 @
该声呐由于技术先进和性能优良,美海军已将该系统装备于舰艇,以及改装型CG-47级导弹巡洋舰、DD-963级驱逐舰、DDG-51级导弹驱逐舰和FFG-7级导弹护卫舰,作为舰载综合反潜作战系统AN/SQQ-89(V) 中的一个分系统。此外,该系统也已向澳大利亚、加拿大和西班牙等国出售。
a; _( n! \/ V ⑵美国的AN/BQQ-5综合声呐系统" [& T9 A, s0 W5 P1 h! i
AN/BQQ-5综合声呐系统是美国海军第一部潜艇用数字化综合声呐系统,于20世纪60年代后期开发,在1972年和1973年期间经过了全面的测试,1973年8月批准生产,并于1974年装备在美国海军“洛杉矶”级攻击型核潜艇上。AN/BQQ-5型声呐系统的主要用途是为“鱼叉”导弹、“沙布洛克”潜射反潜导弹和MK48鱼雷的发射提供水下目标定位数据,承担水下目标的探测、跟踪、分类、识别、噪声测向、被动测距、侦察和水下通信等使命。
1 F" m o$ J+ a" x$ Y6 J x' ~+ D: m) G8 Y

* s9 P9 C$ m( e- P, U+ P8 t
该综合声呐系统由AN/BQS-13艇壳式主动/被动球形声呐、AN/BQR-20首部共形声呐和AN/BQR-25拖曳声学水听器阵列组成。该综合声呐系统既可进行主动定位,又可进行被动定位。该声呐系统在潜艇每舷侧设首、中、尾3个基阵,以艇中基阵为参考点,结合首、尾基阵收到目标信号的时间差,便能计算出目标的距离和方位。
' U* m5 P$ ^0 J7 W AN/BQQ-5系列声呐经过进一步升级,发展为声学快速COTS嵌入 (acoustic rapid COTS insertion,ARCI)AN/BQQ-10声呐系统。AN/BQQ-10计划分多个阶段进行,目的是为潜艇提供性能更强、更加灵活的通用型声呐系统。 6 d1 z: j( E9 H! h. W4 R
⑶俄罗斯MGK-540综合声呐系统
/ w1 ], J; X' C* d4 e+ {4 M 俄罗斯基本上继承了苏联的潜艇声呐技术,是世界上少数能自行研制拖曳阵声呐的国家之一。现在俄罗斯潜艇上普遍装备了艇壳式基阵声呐和拖曳变深声呐。MGK-540综合声呐系统装备在俄罗斯海军现役的所有主战潜艇上,其中包括“阿库拉”Ⅰ、Ⅱ型,“塞拉”Ⅰ、Ⅱ型核潜艇等。该系统主要用于连续监视潜艇所在水域的水面和水下状况,以被动监听方式对目标进行探测、定向和跟踪。 6 M# C/ m, d# n% Y
3 F* n g# Q, a$ B2 P

. x/ X( \) R% B
MGK-540 automated sonar complex 6 o% q: Z6 A: K: E! `
MGK-540综合声呐系统主要由艇壳基阵声呐、低/中频、主/被动搜索跟踪声呐和被动拖曳阵变深声呐组成。其中低频艇壳声呐以被动方式进行搜索警戒,换能器基阵装贴于艇首壳体上,基阵布置在首部鱼雷管下方,对水面舰艇被动作用距离为60km,对潜艇作用距离为20km;拖曳阵声呐用于远程被动警戒,作用距离大于90km。 , F* ^9 s" Z% L3 ]8 T* n# Y/ L2 E
⑷英国2076声呐系统, U5 g! o; r3 j, r
2076声呐是泰雷兹公司为英国皇家海军设计的一种潜艇声呐探测系统,是世界上最先进的全综合被动/主动搜索和攻击声呐系统。2076声呐的开发工作始于1990年。2002年在英国皇家海军“托贝”号核潜艇上进行了2076声呐系统宽孔径舷侧噪声测距声呐部件的海试。“托贝”号和“锋利”号分别于2003年和2004年完成2076声呐改换装工作。“机敏”级核潜艇从建造开始就把2076声呐装备在艇上。2076综合声呐设备采用了重要的商用成熟技术,被称为第5阶段的一个提高计划将用COTS产品部分替代过去的结构。这种“开放”结构能够迅速嵌入新的软件功能。一旦所有的工作完成,2076第5阶段的系统将完全部署在整个英国皇家海军的攻击型核潜艇舰队中。
+ M. X( H* g) v$ e8 C% }8 H, e
8 C/ e: @. r4 u$ ]( h 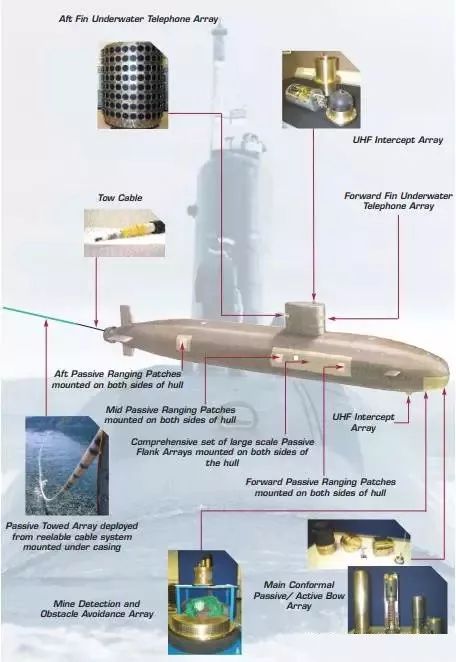
6 l9 `9 G: Z: D 2076声呐在“潜艇上的布置示意图
5 M- m. G4 B% G6 b" Y “天才”号核潜艇是2076型声呐第5阶段工作的首个测试平台,2009年9月开始进行码头试验,2010年第2季度进行海试。2076声呐还被集成到“快速”级和“特拉法尔加”级核潜艇最后阶段升级计划之中。它为“特拉法尔加”级核潜艇提供了一种无可匹敌的能力,并使“机敏”级核潜艇在服役时成为英国皇家海军技术最先进的潜艇。
" B& s! ~& }0 m9 Z( z* w, b7 A. g: i ⑸法国TSM 2233声呐系统- X9 t+ g% Y7 p x- A9 k7 `3 S
法国TSM 2233是众所周知的“埃莱当”系列声呐的最新一代产品,是模块化的综合声呐系统,适合任何排水量的潜艇,满足任何操作需求。法国的TSM 2233型声呐系统采用先进的算法,其首部、舷侧和拖曳基阵具有如下优点:旁瓣抑制;束宽减小;方位测量准确性大幅度提高;降低安静目标附近的噪声干扰效应以及排除潜艇自噪声;提高并保持声呐系统在高航速时的探测能力。
6 S" J/ w2 Y9 D9 [
2 e9 [/ J% j. H8 r7 T 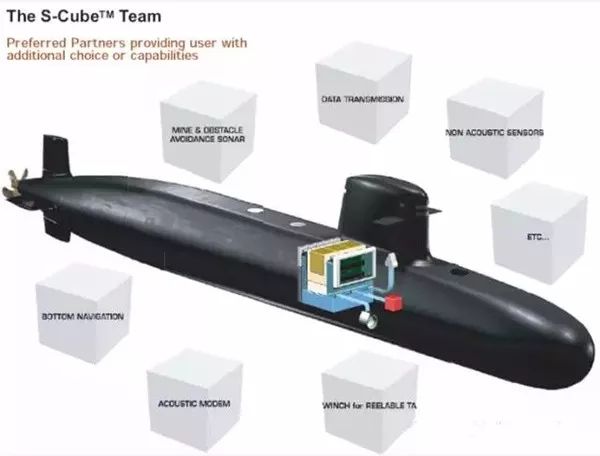
8 G! \8 e) z" g1 s3 m; Y/ @2 T
TSM 2233潜艇被动和主动声呐系统安装在巴基斯坦海军“阿戈斯塔”90B型潜艇上,也被选择用来装备马来西亚海军2艘新型“鲉鱼”级潜艇。在印度购买的“鲉鱼”级常规潜艇上,选定安装的也是TSM 2233型声呐系统。其衍生产品装备在澳大利亚皇家海军的“柯林斯”级和法国海军“红宝石”级核潜艇上。
$ l' N! s5 T; d+ ^8 Z ⑹中国H/SJG-206声呐9 A1 N+ Z1 A' l
国产首款低频被动拖曳线列阵H/SJG-206直到2008年才伴随054A型护卫舰加入人民解放军战斗序列。截至2016年该型声纳已装备16艘054A型导弹护卫舰与6艘052C型导弹驱逐舰,使用时从舰尾右侧的水声设备开口中放出。舰尾左侧开口对应的则是拖曳式鱼雷诱饵。除了近些年新建的战舰之外,更早服役的112“哈尔滨”,113“青岛”,540“淮南”,542“铜陵”等水面战舰也在现代化改装过程中引入了H/SJG-206。
, r4 B! c1 ^0 |3 C: k0 d3 {& X; \8 T

6 u- z4 }; G* m6 ~" h
复合型声纳主动发射机拖曳体
; r: H1 z v7 ^ H/SJG-206采用了在横截面上呈正三角形分布的水听器模块,解决了传统拖曳线列阵声纳的左右舷模糊问题,其批量装备使中国海军水面战舰的反潜探测能力跻身世界前列。然而现代化军用潜艇的安静性持续改善,美国海军核潜艇的噪声水平在半个世纪中下降了60分贝,最新世代型号的声能辐射强度已经只有早期核潜艇的100万分之1。 5 s: p4 W3 N, A' H
2015年初,054A型的第17艘576“大庆”舰服役,其主要反潜探测设备从H/SJG-206升级到了发射机体型与功率远在英法德同类系统之上的全新主被动复合型低频拖曳声纳。迄今为止已有6艘配备主被动复合型低频拖曳声纳的054A加入人民海军战斗序列,前16艘054的拖曳声纳估计也将通过现代化改装逐步升级至“大庆”舰标准。 ' u" ^/ N2 k% c; n
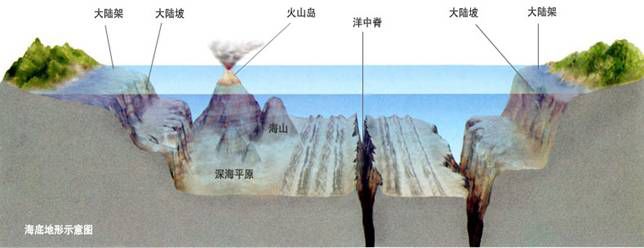
四、浅海声学与深海声学的差异
+ B, p5 H! D) O 对许多海洋声学工作者来说,浅海指“声波波长数倍于海深的水域,简正波可有效描述其声场”。对一些物理海洋学工作者而言,浅海则指从海岸延伸至大陆架坡折处的海洋区域。为何要专门研究浅海声学?一部综合海洋声学能否把浅海和深海都包括在内?!答案是不能!因为浅海环境与深海环境存在相当大的区别。
, t6 g) l V, | 概括地说,当经过第一步——写下基本波动方程之后,二者的边界条件、声速剖面、非均匀介质,以及许多其他因素都存在着明显的差异。事实上,浅海是比深海更为复杂的声学介质,浅海声学现象也更具有研究和开发的意义。 ( i# {+ I9 n* z0 X8 G
5 P# L- ~+ ^2 o; c 首先,深海声学和浅海声学最重要的差异在于边界,即海面和海底。在浅海中,通常必须考虑海面或海底对声的影响,但在深海中,一般无须考虑这些边界的影响。对于在海上工作的海洋学家来说,既友好又令人担忧的海面边界是两个边界中更简单、更易了解的边界。即便如此,认识海面边界仍绝非易事。
6 w r# K% C4 j) W+ C 在海面平静时,通常可将海面视为标准压力释放边界,从物理和理论的角度也易于处理。但是,在海况较差时,覆盖在汹涌的气泡层和气泡群下的海面则表现出与风程相关、具有频率指向性的粗糙度谱。如果在极地地区,就还需考虑冰层的影响。因此,给海面边界建模绝非易事(相较于深海环境,这项工作又不可避免)。而海底边界则更具挑战性,因为海底不仅更难抵近,且在没有特殊工具的条件下不可穿透。 $ g% b+ e1 r# I W; T/ O3 T
此外,由于在浅海水体声速剖面通常向下折射,海底就成为声传播中不可回避的边界条件。除去与海面散射中类似的表面粗糙度外,海底还存在深度不规则、浅底基层含杂质、底质多样,以及沿岸地质学涵盖的所有令人目眩的沉积层及内部结构。实际上,海底地质结构本身就是一个非常广阔的研究领域,而不仅仅是声学中的边界条件。
6 E4 P& z7 c* J2 p7 |( b 正如浅海和深海在海面和海底边界上存在差异一样,两者的物理海洋学条件也存在差异。不同于我们熟知的浅海波导“Pekeris模型”所描述的单一性海洋,即在等声速海底半空间上覆盖着等声速的水体。沿岸海域中的各种现象在声速剖面与距离、深度和时间之间构成了复杂的相关性。沿岸锋面、涡旋、内波(线性和非线性)、河流浮力羽状锋、西边界洋流的湍流边缘,以及其他大量的海洋现象,构成了尺度大小不同的结构——虽然有些尺度足够小,不会对测量和建模构成挑战,但也足以在我们关注的声学频率范围内产生足够大和足够强的影响。诸如此类的海洋现象都为浅海所特有,也因水浅而变化,从而导致浅海与深海在物理海洋学上的差异。
/ W0 d A, p# J3 k  fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
7 s. k4 \4 J& ^5 q 海洋生物也是不可忽视的因素,以鱼类和海洋哺乳动物为例。在深海中,可以探测到鲸鱼和海豚发声产生的环境噪声,但由于深海中鱼类和海洋哺乳动物的整体密度低,动物并不会明显地产生、吸收和散射声波。但是,理论和试验研究都证明,作为大多数海洋生物主要生存环境的浅海,不仅生物噪声更大,鱼群对声的吸收和散射也更为显著。 $ l3 y: x! {5 j4 x4 N: I! r
除了在物理环境上存在差异外,浅海和深海还存在着声学上的差异。其中,主要的两个差别是:⑴混响和衰减更强;⑵浅海中的三维效应更强(包括随机的和确定的)。首先,如前所述,由于浅海中边界相近,边界对声的影响是毫无疑问的。因此,浅海中的后向散射、混响和海底衰减也就更显突出。(这并不表示深海不存在此类混响。举例来说,诸如极地海域、地中海等海域,其深海向上折射的声速剖面会迫使声波与海面相作用,从而形成混响。)其次,则是三维声效应。在深海中,只有在测量海底山和岛屿这些极为有限的海洋区域时,才重点关注三维声效应。而在浅海中,大陆架斜坡、大陆架坡折和海底峡谷都具有明显的三维声效应。此外,正如近期理论和试验的研究表明,水体自身的水平折射也会带来相当显著的影响。事实上,多年来三维声效应研究在很大程度上被人们忽视,而浅海声学则为它带来了一场小规模的复兴。 . b6 ?& l# Y. P
五、国外水下声呐技术发展趋势
* }% P% V2 f3 }$ Z 目前水下声呐技术及装备发展趋势主要体现在三方面:全自适应智能化认知、共址和分布式MIMO声呐、广域异质多传感器联合感知。
3 l; M1 u E" S9 b+ @" g3 e" q ⑴全自适应智能化认知
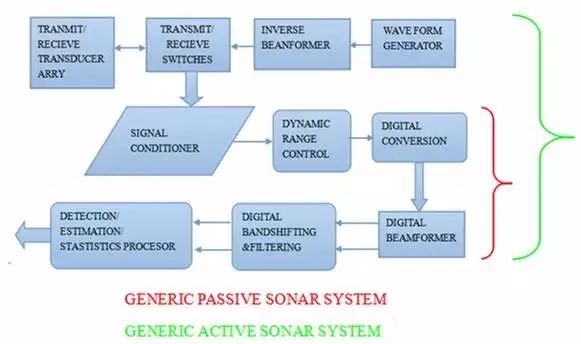
7 P8 k/ C# w1 j; y0 ^6 h 传统主动声呐系统在处理目标反射回波时,没有考虑声呐接收机感知的环境信息和目标特性的先验知识对发射机的影响,发射信号参数固定。因此,在传输衰减、噪声、混响、多径、时变和大多普勒等复杂水下环境中很难获得理想的探测效果。受近年认知无线电、认知雷达快速发展的启发,通过将先验知识和连续学习引入传统声呐系统,建立对发射端的自适应反馈控制,提出了认知声呐,其组成如图所示。基于知识理论的智能化认知声呐能够根据环境变化和目标特性的先验知识对发射机和接收机进行联合自适应控制,提高对水下目标信号的探测和识别能力。
+ T) e9 v% G9 d" ~: C" V6 [0 l4 I/ J! p4 z T# R6 ^' ?& n! d
⑵共址和分布式MIMO声呐
3 @7 A) u- R" c MIMO技术首先在通信和雷达领域得到应用,分为共址MIMO和分布式MIMO。共址MIMO利用发射信号的分集特性扩展收发阵列的虚拟孔径,提高目标探测能力。分布式MIMO阵元分开排列,发射正交信号,从不同角度照射目标,减低起伏衰落,提高探测稳定性。水下特别是近海航船数量多、噪声大、声场复杂、多径和多普勒效应严重,对水雷、蛙人、静音潜艇等弱小目标探测难度大,传统主被动雷达都难以达到理想效果,MIMO声呐为解决这一问题提供了一条新途径。
! o4 C& Q7 [! r3 i; E8 ]! i3 ?% W% ^% [" _& \, R+ g
⑶广域异质多传感器联合感知
/ v1 {3 _1 K; M4 |& l4 o& m 单一传感器探测效率低,难以满足大范围、长时间水下信息获取需求,通过网络技术将警戒监视海域内多个不同位置布放的声呐、雷达、激光、红外等传感器进行互联,实现数据的交换、分发和汇聚,进行集中或分布式数据处理,可以形成分布式网络化水下警戒探测系统,实现对覆盖范围内目标的探测、定位、跟踪和分类识别功能。分布式网络化水下预警探测系统具有机动灵活、成本低、效费比高等优点,能够有效增强水下战场信息感知能力。 - ~# P" m% w A* ~4 W7 f& y
6 b3 K9 U4 I6 M L
9 I6 D% O+ a7 d0 R0 e
, b1 X4 K4 z5 }, J/ q0 ^
欢迎射频微波雷达通信工程师关注公众号 / t$ e+ c% E. h' G& H, `' U
中国最纯粹的射频微波雷达通信工程师微信技术群,欢迎您的加入,来这里一起交流和讨论技术吧!进群记得备注方向和公司名称哦,我们将邀请您进细分群!
) z* w" f; y9 Z! v, l
2 N3 E. z. B; W6 t: o) T6 s3 c
用手指按住就可以加入微信技术群哦! 7 s& o- M' h' T. h @, J; w4 M
电子万花筒平台自营:Xilinx ALTERA ADI TI ST NXP 镁光 三星 海力士内存芯片 等百余品牌的电子元器件,可接受BOM清单,缺料,冷门,停产,以及国外对华禁运器件业务! ) B2 O5 j9 A* P9 N U4 X8 Z
欢迎大家有需求随时发型号清单,我们将在第一时间给您呈上最好的报价,微信(QQ同号):1051197468 也希望您把我们的微信推荐给采购同事,感谢对平台的支持与信任!
6 M3 k9 g4 O# b: `) `6 e, p9 @ 与我们合作,您的器件采购成本将相比原有供应商降低5%以上!!不信?那您就来试试吧!!欢迎来撩!! : F3 h6 n1 W$ n! ^; k
7 y1 y @6 J' \' L4 G" E6 z/ Q, @4 {8 M
X Q+ W, o# C7 p r5 D
3 h2 Z3 s$ G5 u* a) o* [ y7 y) I | 

