|
一、概 述# s" T) ^" y, S3 H
1、发展总体情况 # s" F+ N8 x* d( \# p* w$ k* a
海洋占据了地球4/5的表面积,是各种矿产、油气和生物资源的巨大宝库。党的“十八大”作出了“建设海洋强国”的重大部署,要求“提高海洋资源开发能力,发展海洋经济,保护海洋生态环境,坚决维护国家海洋权益,建设海洋强国”,还提出要“高度关注海洋、太空和网络安全”,这表明海洋与国家权益息息相关,国家必须要通过大力发展海洋高新技术,发展具有自主知识产权的海洋高新技术装备,奋力追赶国外先进水平,以防受制于人。 : m9 M8 @* w0 \# W. ]3 o
% p, k3 [. ?$ @# I" ?2 o# L
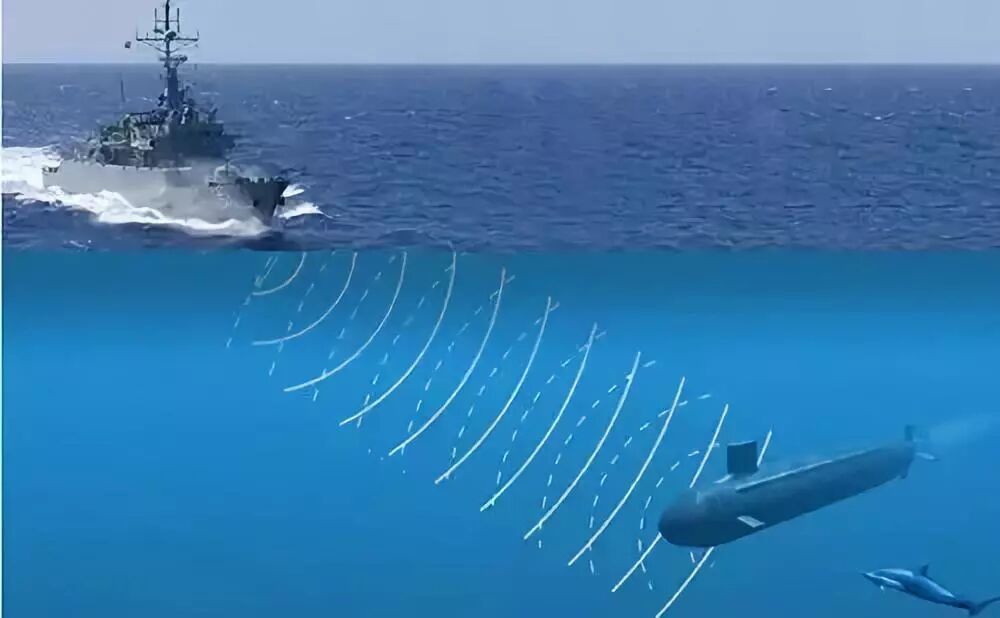
在海水中,光波和无线电波衰减严重,传播距离十分有限,难以满足人类海洋活动,如水下目标探测、通信、导航和定位的需要。相比之下,声波在水中的传播性能要好得多,采用海洋声学技术研发的许多海洋声学装备成为人类观察海洋的“鼻子”、“眼睛”、“耳朵”和“嘴”,上述特点决定人类在海洋资源开发、环境监测、气象观测与预报、海洋测绘、海上维权活动、海洋科学研究和军事等方面的活动离不开海洋声学技术。 " m% \. |0 a+ @# ?9 y- g
7 j* a- @1 }/ C) e( S' F) A. ?: E
根据用途不同,海洋声学技术又可分为海洋声学探测技术、海洋声学通信技术和海洋声学定位与导航技术等。其中海洋声学探测技术主要用于对海洋物理参数与过程的探测和对海洋各种特定目标特性的探测,是人类认识海洋、开发海洋和利用海洋必不可少的海洋高技术。基于海洋声学探测技术研发出大批海洋声学探测装备,例如合成孔径声纳[1-2]、单波束测深仪、多波束测深系统[3-4]、测扫声纳、高分辨率测深侧扫声纳[5]、浅地层剖面仪、多道地震系统[6]、声多普勒流速剖面仪[7]、鱼探仪[8-9]、前视声纳等。
0 P* M r# G B/ [ 近年来,在“863”等国家计划的持续投入下,我国在海洋高技术相关领域快速发展,已实现对国外海洋声学探测技术的全面跟踪,取得一批成果。但综合来看,高端海洋声学探测设备的研究与产业化近年来一直是发达国家的重点发展领域,竞争非常激烈,而我国的海洋声学探测技术与国外先进技术相比还有很大差距。例如对于海洋民用声学探测装备而言,我国90%以上的装备来自于国外,也没有海洋声学探测装备的知名品牌。
* Z, ~- o; _4 ~! ]5 ` 本文的目的是对我国海洋声学探测技术的竞争力进行分析,为下一步发展提供参考。 ; y' r+ g2 \/ w3 ]9 M
2、技术结构
0 |# F0 N# [2 A7 V: k: G* m% H% {$ Y 海洋声学探测技术包含了6大技术方向,分别为: ; I9 |( w+ ?1 l
全海深测绘技术; 9 Y# ? }3 |$ K* c
近海底微地形测绘技术;
; J% R# A3 P% Q2 v! X# ^1 i 声学测速测流及水质监测技术; 9 g1 a6 J! ~/ |/ q$ f$ g
海洋生物资源环境声学探测与调查评估技术; ( q: B& K2 F5 x! I
声学区域安防及维权技术;
" V- w$ I% O5 y4 u" F$ _ o 海底资源声学勘探技术。 0 P% K8 i. D, `, K$ V! o9 s
上述方向又可细分为18个核心关键技术(表1)。
; m; I0 L" [/ d6 i+ }1 r% q 表1 海洋声学探测技术方向核心关键技术
1 x4 G# a- ^7 Q' P/ }4 ] 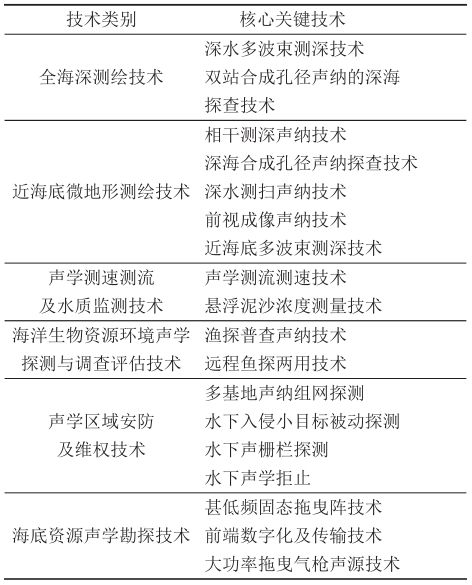
9 T# b9 h% Q4 L9 u/ r
全海深测绘技术侧重于以船舶为探测声纳载体,实现对全海深的测绘,一般探测距离较远,核心关键技术主要包括深水多波束测深技术和双站合成孔径声纳的深海探查技术。近海底微地形测绘技术侧重于近距离探测,通常分为浅海型和深海型,二者设备的耐压不同,核心关键技术主要包括相干测深声纳技术、深海合成孔径声纳探查技术、深水侧扫声纳技术、前视成像声纳技术和近海底多波束测深技术。声学测速测流及水质监测技术主要用于水体中流速和水质的监测,核心关键技术主要包括声学测流测速技术和悬浮泥沙浓度测量技术。
: ?( p. [( C5 x 海洋生物资源环境声学探测与调查评估技术主要用于渔业资源调查,核心关键技术包括渔探普查声纳技术和远程鱼探两用技术。声学区域安防及维权技术[10-11]主要用于对船只、快艇、水下机器人、各种蛙人等水面水下目标进行自动检测、跟踪、识别和报警,核心关键技术包括多基地声纳组网探测、水下入侵小目标被动探测、水下声栅栏探测和水下声学拒止。海底资源声学勘探技术主要用于深层地质构造探测,核心关键技术包括甚低频固态拖曳阵技术、前端数字化及传输技术和大功率拖曳气枪声源技术。 二、技术的国际发展趋势1 L' g# n! j' @$ j) o5 b
1、发展趋势 7 N; H2 [5 V2 h# J1 F- T, R) f
在国外,海洋声学探测技术经过几十年的发展,与其相关的技术和设备已经形成了较完整的供需关系和产业链,进入了良性发展的状态。每个公司都具有自己的一类或几类主打产品。 7 P$ T: t- u) G8 A z7 q" ]0 H
- d7 Y0 n* a, j; a; U+ s8 o- C 综合多家公司产品,构成了较完整的产品系列,以满足多方面的需求。与海洋声学装备相关的各种配套产业,例如声纳阵制造、机械加工和电子技术等方面,发展均衡,基础坚实,这一切也为海洋声学探测装备的发展创造了良好的环境。 $ A/ r- f; F. k/ o; X M
目前国际竞争格局呈现由美、欧(主要是英、法、德、挪威、瑞典、意大利、丹麦和荷兰)、加拿大和澳大利亚主导,日、韩和我国跟进的态势。传统上,水声探测设备公司主要包括一些大型军工制造企业,包括美国雷神 (Raytheon) 公司,欧洲的 Kongs-berg 和 ATLAS 公司等,由资深专家领导研发,有着很强的高技术研发能力。
2 ?/ @ G/ K* H. E 
( @ S: h% w+ x$ y6 U2 m 近年来,随着水声探测民用市场的逐步扩展,涌现了一大批先进水声技术公司,包括 RDI,LinkQuest,Edgetech,iXBlue,Reson和Blueview等。推出了富有特色、满足用户多样化需求的产品,使得海洋声学探测技术研发国际竞争态势十分激烈,也从侧面说明自20世纪90年代开始的国际水声设备研发转型取得了全面成功。 : ?3 s7 D5 Y7 o9 U# |& y# K
下面举例说明几种核心关键技术的发展趋势:
a. p5 s# \, z1 O% h- ^# b 双站合成孔径声纳本身是合成孔径声纳的一个研究趋势,在常规合成孔径声纳技术的支撑下,双站合成孔径声纳可向着大水深、大测绘带宽、高分辨率和智能化方向发展; : g, V6 u, i; h* j$ D) W
合成孔径声纳向着大水深、大测绘带宽、高分辨率和智能化方向发展;
, V: n$ r/ J2 \, d" m 深海侧扫声纳技术向着探测、识别一体化和基于逐像素点聚焦的全覆盖探测方向发展; ; i5 Y4 k, `0 v5 W! [4 Z% H# S
多普勒测速技术及产品向高精度、多功能、多频化、高频化、高耐压、网络化、定制化等方向发展;目前前视声纳向着小型化、高分辨率、远距离及高速实时处理的方向发展。 / p# }" N9 J- @$ Y$ N
总体而言,海洋声学探测技术与装备未来发展的基本趋势是:
+ a. L* U) @# _1 Q/ D% X9 r! M 面向深海及复杂环境; 7 G- E3 d/ A7 V& E
小型化及多传感综合,适应AUV小平台应用需求,实现近海底观测和测绘功能;
8 ~& c. U& O, B% } 换能器频带扩展及多频带综合,提高水声探测的效率和精度;
% V9 ]- [) X$ C 在成像及海底勘探中,前端数字化及高性能计算技术应用,实现了系统可靠性提高和实时计算成本下降; ; v( X/ D3 E8 }3 K6 y! S* |3 T
除了传统的技术方向之外,为了适应海洋工程的发展,派生于传统技术领域的新技术方向将不断涌现。
( `4 F6 X: }) [3 b' R: P. G 2、国外优势科研机构
! G; h( g# t; G8 W4 X 表2列出了海洋声学探测技术国外主要研究机构。
0 Y/ n- j# [8 Y1 i j4 z) U Y. B; Z3 f/ L. C% P- V" y
表2 声学探测技术国外主要研究机构
5 v/ W/ ~1 }# A- S* }& M 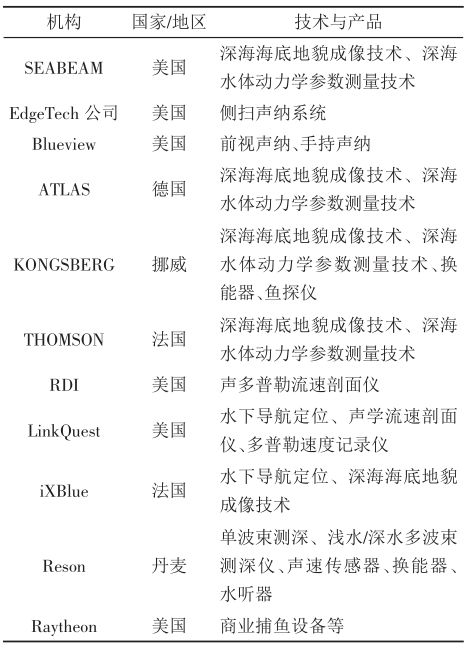
三、技术的国内发展现状' K! Y6 g% |5 ?- A) g+ H0 I$ a* w
1、技术进展
) ]; K, G7 w$ v* R' s0 n; y9 Z1 ]5 Q 长久以来,促进我国声学技术发展的源动力主要来自于军方,声纳设备装备于水面舰艇和潜艇上,经过多年发展,浅水声纳种类相对齐全,具有较完整的产业链。近年来,为满足中国大洋协会主导的国际海域资源调查与开发的需求,我国用于深海声学探测的装备取得一定发展。 2 h! m) `) e4 `. v8 S& m
. K/ y5 F* f* h3 `
' ]# f+ |8 P- a2 f0 L
下面举例说明我国几种核心关键技术的技术进展: / z, R3 S X. x
在声多普勒测速技术方面:中国科学院声学研究所自20世纪80年代起开始研究,先后研制成功船用 150 kHz 多功能声多普勒流速剖面仪(简称ADCP)工程样机和定型样机、下放式 ADCP 工程样机,开展了 ADCP 波浪反演研究和河流海口流量测量试验。系列自容式 ADCP 产品样机(75kHz,150kHz,300kHz,600kHz)经长期潜标海上验证后已提供给用户使用。715所主要开发船用38kHz和150kHz相控阵ADCP,38kHz相控阵ADCP已提供给用户装船使用。哈尔滨工程大学主要研发120kHz以上频率的系列相控阵计程仪。
3 b, @4 k1 ^9 t N! o 在声学区域安防及维权技术方面:近年来,在反恐形势和水下安保需求推动下,我国水下安保技术得到了快速发展。以中科院声学所为首,包括国内其他科研院所、中船重工、中船工业集团在内的相关单位,纷纷开展和参与了水下安保技术的研发和应用相关工作。中科院声学所承担了2008年青岛奥帆赛、2010年上海世博会等一系列重大赛会的水下安保任务,并在2011年召开了由中科院声学所主办的“全国第一届水下安保技术学术交流会”。目前已初步形成围绕小目标探测为核心的水下安保技术的产、学、研体系,已逐步进入水下安保技术的快速发展时期。
# E! h! o7 @. ?4 P" M. v2 S" O+ F& C 在合成孔径声纳技术方面:中国科学院声学所在“863”计划支持下,于20世纪90年代末开始合成孔径声纳的研究,历经“九五”、“十五”和“十一五”的发展,目前已经形成了系列样机,并建立多平台、多频段SAS技术体系。目前已经掌握了合成孔径声纳总体设计、多子阵快速成像、基于传感器和原始回波数据的联合运动补偿、自聚焦、信号调理和采集一体化模块、大功率发射机等一系列关键技术。 ( X8 a! A/ m# z4 m! i7 U* E
在海洋生物资源环境声学探测与调查评估技术方面:中国科学院声学研究所、中国水产科学研究院黄海研究所等多家国内科研院所和高校已经开展了渔业声学相关基础和应用研究,开始培养渔业声学专业的研究生。国内已经连续召开五届全国渔业水声学会议,国内渔业声学研究已经初步形成良好的局面。 2 q' ~! P* c! M4 o
在声学探测技术方面:我国在国家层面进行了有效资助,我国合成孔径声纳在浅海技术方面基本与国外同步、水体测流测速方向已经形成了多个频段产品、深水多波束测深技术方向处于国外第三代水平。总体上讲,在相关技术领域取得重要进展,部分设备已经具有很强的竞争力。但由于产业没有跟上,市场主要被外国产品控制,在该技术领域上的全面竞争显得后继乏力,技术整体先进性、新技术创新能力、产业转化能力与国际水平相比尚有不小的差距。通过资源合理配置,具体的技术方向尚较易突破,但整体创新、产业发展方面则要困难得多。
1 G$ t# t# I% j5 C, n: x+ y, T 因此,总的来说,在声学探测技术领域我国与国外差距还是相当大的。 2 S. u2 N8 K* H5 v2 n+ I1 {
2、国内优势科研机构
O1 Y5 {6 D5 a. q* |& N 表3列出了海洋声学探测技术国内主要研究机构。 ) |3 h/ A' J5 y9 E+ [& b6 r. V
! E1 e8 l3 r/ u; J/ s1 r# ~7 @ 表3 声学探测技术国内研发优势单位
: J7 v+ }! P$ X1 N/ T 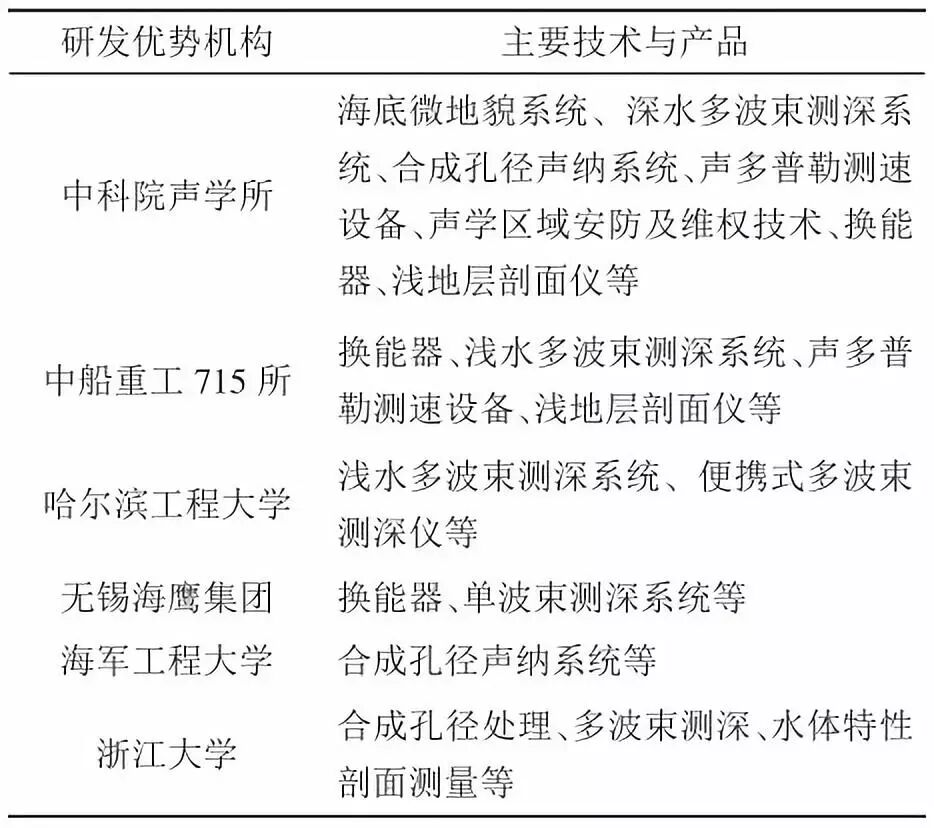
8 e7 C4 z2 N2 i7 _
3、存在问题 % ~" F! Q. s$ l
目前,海洋声学探测技术及系统的研发力量主要集中在科研院所和军工企业,主要基于国家及部队项目驱动进行研发,国产化率较高,但产业化及配套技术方面力量较为分散。对于声学系统而言,从样机到产品需要很好地解决环境性能可靠性、主要器件(特别是换能器)工艺稳定性和一致性、水下机械部件工作可靠性等产品级关键性技术工艺问题。因此,声学探测技术的发展应当加强市场需求方向,在项目层面除了强调声学技术指标外,还应对环境应用性能指标提出要求。 " s$ N" ?( t$ ~+ M' Z
( Q: ^1 ^5 |, d2 z* A" S7 W; I
总的来讲,海洋声学探测技术的发展需要长期稳定的支持,按照实际需求以及迫切程度循序渐进开展相关技术研究。同时需要加大基础工业投资,提高国内材料、工艺水平,使得海洋声学探测技术能够真正走向良性发展的道路。 四、水平综合评价
: l F% S$ j) R) R3 F 总的来看,我国合成孔径声纳在浅海技术方面基本与国外同步,深海合成孔径技术尚未开展相关工作,与国际先进水平有5~8a的差距。水体测流测速方向已经形成了多个频段产品,主要差距在于产品化方面。高频成像/前视成像方面已有了初步样机,但成像效果不及国外先进水平,差距主要在于系统集成和换能器器件工艺方面,初步估计差距在10a左右。渔业资源普查及评估技术近年来刚刚起步,国内渔用声纳系统基本进口,与国外先进水平的差距在15~20a左右。综合来看,我国的海洋声学探测技术与国外有10a左右的差距。 * p1 f d, m( d5 M
五、多波束测深声纳技术分析 |( [6 _: B6 [ t) Q
1、国外发展现状与趋势 & {( A4 y/ E2 J* m9 \( b+ o, \
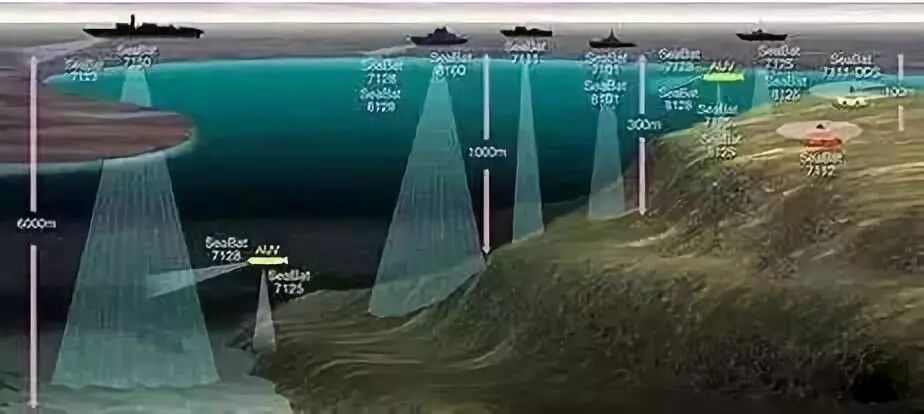
多波束测深声纳技术是目前最重要的水深测量方式,包括深水多波束测深技术和近海底多波束测深技术两大类,它能够实现海底地形地貌的宽覆盖、高精度探测。该技术至今已经过近60年的发展,始终保持旺盛的生命力。自20世纪80年代投入商用以来,目前已经形成从深水到浅水,从用于船舶到用于不同工作深度水下载体的系列多波束测深声纳产品。
/ g; A4 e- b- m' Y
: k% V' A# ?" _ M5 P0 _! A 目前多波束测深声纳已经发展到第四代水平,以采用宽带技术、近场自动聚焦和水体显示等技术为代表,近一步提高了声纳性能,波束数更多,测深点更密,集成度也更高。
! l* [* _# T+ ?. w 典型产品为KONGSBERG公司的EM122深水多波束测深声纳和EM2040浅水(或近底)多波束测深声纳。前者为船载系统,探测水深20~11000m,标称指标覆盖宽度最大43km,单次发射形成两行共576个波束,可加密至864个波束,波束角宽最小可达0.5°×1°。后者可安装在船上,深海型最深可用于6000m水深,工作频率200kHz、300kHz、400kHz可选,最多可选用两个接收阵,此时波束数最多达1600个,覆盖角宽最宽可达200°,波束角宽最小可达0.4°×0.7°。
( T+ c0 ]9 Q4 U: E4 P, w' I- @ 在现代水声、电子、计算机、信号处理技术蓬勃发展的背景下,多波束测深声纳技术水平将不断提高:信号处理算法的不断完善将显着提高系统测深精度和覆盖范围;换能器和电子硬件的一致性将越来越好,采集软件和后处理软件功能和用户体验将越来越优;系统探测能力将继续增强,从测深扩展到海底反向散射声强探测、海底底质探测、水中目标探测等多方面,将极大地扩展系统的适用范围;根据需求不同,多波束测深声纳的产品类别将更加精细化。 - a, t8 W5 Y v" E% Q" c$ Q
2、国内技术水平判断和依据
6 f; @! ]) E( v1 H+ B( |1 m (1) 关键技术掌握程度 ; G9 d: M5 F% ^. @0 Q/ ^- k
我国多波束测深声纳技术与国外主流技术有较大差距,长时间以来,由于从国外市场能够买到,造成我国的全系列的多波束测深系统长期依赖进口。“十一五”以来,国家支持了相关研究工作。2014年在“863”计划支持下,研制出基本达到国际第三代水平的深水多波束测深系统。目前有少量浅水多波束测深声纳实现产品化,但性能与国外有差距,市场占有率非常低。 $ T; Y; {7 K6 c5 @& I* p( `
(2) 差距 / S9 m9 `7 H( g7 V4 R
总体来说,我国深水多波束测深声纳没有形成系列,在信号处理、声纳阵制造、电子硬件、采集与后处理软件等核心技术方面有5~15a差距,整体技术水平与国外相比有10a差距。
4 N) q8 Z9 M# b/ l+ t+ Q" _ 3、应用前景
. b; @9 U F/ N2 u2 Y$ q0 v: i' o 多波束测深声纳是当今前沿的海洋高技术设备。水深数据是海洋探测中最基础的数据之一,准确的水深数据在军民两方面应用都有非常重要的意义。在海洋科学研究、资源开发、工程建设、航行安全、国家权益以及军事等活动中,通常都需要准确地获取所关注区域内的海底地形地貌信息,作为基础资料与支撑依据。无论是船载深(浅)水多波束测深声纳,还是水下载体上的近底多波束测深声纳都具有广阔的应用前景。 ' |& L; C* z( Z, B# S* ]2 K9 t& \& J
/ @7 I% } L8 K% u K1 C) I 参考文献:
, F1 w" e$ E9 r5 s' c [1] 张春华,刘纪元。合成孔径声纳技术的研究进展及未来[C]// 中国声学学会 2005 年青年学术会议[CYCA05],中国杭州,2005:1- 6.
6 e$ r' d% k9 g& |) F" K [2] 张森,唐劲松,陈鸣,等。 干涉合成孔径声纳海试样机研制与试验[J]. 声学技术,2012,31(2):168- 173.
- k; R+ D& S& C& @) J4 g* \% r [3] 陈若婷,刘晓东,刘治宇,等。 一种基于横摇稳定的多波束测深方法[J].声学技术,2013,32(5):368- 372. ! K- V4 j$ L4 h
[4] 李海森,周天,徐超。 多波束测深声纳技术研究新进展[J]. 声学技术,2013,32(2):73- 80.
. C# J# i3 ` _) U7 i$ ^3 y [5] Liu X,Zhang F,Zhang D,et al. Improved Methods and Results of HRBSSS for Mapping Deep Sea Bottom [C]// Acoustics 2012,HongKong,2012. 4 ]+ a; Q$ g$ Q8 p( w
[6] 裴彦良,刘保华,连艳红,等。 海洋高分辨率多道数字地震拖缆技术研究与应用[J]. 地球物理学进展,2013,28(6):3280- 3286.
' X# v" o; s( v% T Z [7] Wang C,Wu J,Gao C,et al. Design and Sea Test of Lowered ADCP with Acoustic Telemetry[C]// IEEE Oceans11,2011.
' ]: G0 I$ G( b* A6 v) t( i [8] Wada M,Yasui S,Saville R,et al. The Development of a Remote Fish Finder System for Set- Net Fishery[C]// Oceans,St. Johns,2014:1- 6.
3 d$ ?+ e0 J/ }) Z8 j- N& n, C1 ~ [9] Qiao Zhang, Feng Xu, Tao Wen, et al, A Method of Fish Classification Based on Wavelet Packet and Bispectrum [J]. Sensors &Transducers, 2014, 164(2): 272- 277.
, w; O4 i2 s2 F" ^6 F9 R/ j [10] 蒋立军,杨娟,许枫。 蛙人探测声纳研究进展[J]. 科学通报,2009,54(1):1- 4. $ S1 u; M4 R3 D; C! s0 g4 q4 T% p
[11] Juan Yang, Feng Xu, Jia Liu, et al. The Reverberation Suppression in Wideband Diver Detection Sonar [C]// OCEANS 2014, St.Johns, 2014.
, I7 w5 g( D9 d& s2 j8 h% ` 文章来源:声振之家
6 [) u& n0 r7 k3 p% A9 ?$ _  fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
, |! p$ Z3 r3 r! b 这里是声学楼 # j- O2 ?& T/ r; i! x
微信公众号:acousticsblock
+ F8 V, y5 O! U% I2 V 微信二维码: & }% Z, u% \% f( S
$ H4 {4 j5 D; s- D7 w* ]" ^2 C8 s5 \% i0 Y* x' [
1 Z# q3 M6 B/ ]3 V. \: [7 u
8 z; l: U1 h' s1 U$ E
: B& |% c9 P. _) V0 q5 [
| 

