|
- o; |3 r+ W( t7 C- f3 [( V/ y 任何机器人都离不开传感器,机器人要具备智能行为,就必须不断感知外部环境并做出相应的决策行为,而我们常用的扫地机器人都有哪些传感器呢?包括超声波传感器、红外测距传感器、接触传感器、红外光电传感器、防碰撞传感器、防跌落传感器、防过热传感器、集尘盒防满传感器、边缘检测传感器等众多传感器。 . l- O+ g7 E+ d; I9 P, N3 v4 p

6 F' P* o( ?" @4 @ 超声波传感器 + f9 f7 Y' i( |+ }1 [* b
超声波是具有一定频率范围的声波,它具有在同一介质中以恒定速率传播的特性,在不同介质的界面会发生反射。 利用该特性,可以根据该特性测量透射波和反射波。之间的时间间隔,从而达到测量距离的功能。在扫地机器人中,避障功能的实现是基于超声波测距原理。它的传感器部分由三对组成(每对包括一个发射探头和一个接收探头),共六个超声波传感器头。
( N3 k6 S1 \1 i/ A! n) ~ 频率为40kHz、幅度为5V的超声波信号由单独的振荡电路产生。在控制器发送的路径选择信号的作用下,将40kHz的振荡信号加到超声波发射探头的两端,从而产生超声波信号给超声波发射器。外部排放,当信号遇到障碍物时,会产生反射波。当接收器接收到反射波后,可根据前述测距原理准确判断障碍物的距离;同时,根据信号的幅值也可以初步确定障碍物的大小。
) ?: y# ?+ h: {. E  7 i, e, b% T9 O; V- h& C" ]
超声波传感器采用直接反射检测方式,位于传感器前方的被检测物体将发出的声波部分传回传感器的接收器,使传感器检测到被检测物体,并由单片机系统处理,确定大小、距离和一般属性 前面的物体。
3 R$ x1 S Q" ?9 C, H5 n) L# A$ ^& Z$ N7 L7 G 红外测距传感器
+ `) U- c# U% F: H0 x2 z/ x 红外测距传感器利用红外信号在距离障碍物的不同距离处反射强度不同的原理来检测障碍物的距离,红外测距传感器具有一对红外信号发射和接收二极管,发射管发射特定频率的红外信号,接收管接收该频率的红外信号。当红外探测方向遇到障碍物时,红外信号被反射回来接收。红外线的返回信号经过接收处理后,可用于识别周围环境的变化。
5 r5 D+ Y" Y1 H: B3 ?- Z 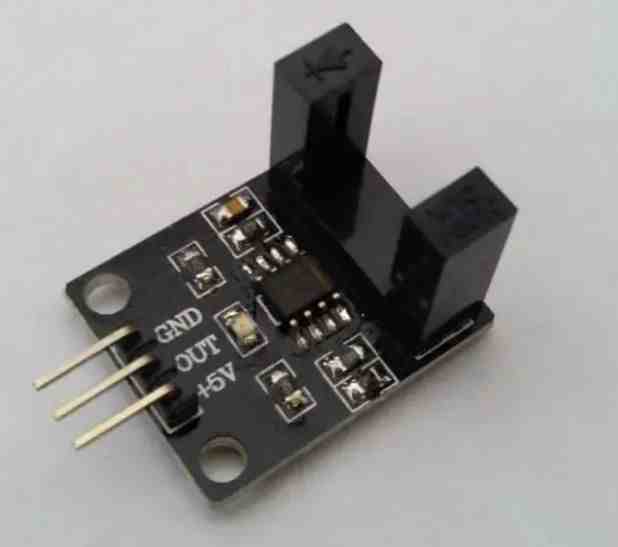
) y3 w& N4 f; l& {* J* B 触摸传感器
5 ~) ` v; {! X9 S" I7 g6 j 接触式厚度测量通常采用电感式位移传感器、电容式位移传感器、电位器式位移传感器、霍尔位移传感器等(见位移传感器)。为了连续测量运动物体的厚度,位移传感器的活动端常安装滚动触点以减少磨损。接触式厚度传感器可以测量物体的高度和空间的大小,扫地机器人可以以此来检测障碍物的高度,并做出进一步的判断来发挥其功能。
2 {- j& O1 x1 n- s8 V- f 红外光电传感器
4 d6 H0 z2 l/ Z& l; h 浊度传感器的外壳固定在被测箱内,以一定波长的红外发光二极管为检测光源,穿透被测溶液,检测透射光强度进行检测 溶液的混浊程度,红外发光二极管发出的红外光穿透待测溶液的介质,被接收端的光电晶体管接收,产生光电流。由于溶液中所含的介质、灰尘颗粒大小和密度不同,光电晶体管的光电流近似呈线性变化,滤波输出后,得到与浊度相关的检测信号。 * N8 i7 p4 N2 q
防碰撞传感器 3 t) d- Q" M0 E$ ~1 i% n
由于各种因素的影响,扫地机器人遇到障碍物在所难免,为了应对这种情况,我们利用光电开关传感器来感应扫地机器人外部受到的撞击以及撞击的大致位置,以便扫地机器人做出相应的决策。
# {# K& p( W0 J 扫地机器人前端设计有约180°的碰撞板,碰撞板左右两侧安装光电开关,光电开关由一对红外发射管组成。发光二极管发出的红外光通过机器人本体上的特殊孔被光电二极管接收。 当机身的防撞板发生碰撞时,防撞板会堵住机身上的特殊孔。这阻碍了红外线的接收将信息传递给控制系统,光电开关的工作原理如图所示,这种结构可以避免测量盲点造成的误差,扫地机器人任意方向的碰撞都会引起左右光电开关的响应,从而根据碰撞的方向做出相应的响应。
0 p# e; ~6 V6 U7 D" i! \2 z 
2 c: K2 S1 f: j( X7 C" D 防跌落传感器
( j# ]& S3 N1 E. Y% E/ \" R8 x 为防止机器人在遇到台阶时跌落,机器人背部安装了三个防跌落传感器。防跌落传感器还使用超声波进行距离测量,当扫地机器人行进到台阶边缘时,防跌落传感器利用超声波测量扫地机器人与地面的距离。 当超过限值值时,向控制器发送信号,控制器控制扫地机器人转向,改变扫地机器人的前进方向,从而达到防止跌倒的目的。 % s$ F* K+ d! V
边缘检测传感器 $ X X# h. n0 O7 O$ n& z
边缘检测传感器是一个机械开关,开关的触发端设计为滑轮结构,机器人两侧各安装一个,保证机器人始终靠墙边行走,这样可以更好地清洁墙壁边缘的死角。 ; ?+ ~9 \) e6 g" z6 D1 U+ q s
陀螺仪 & T# E( P G3 ]+ G, D* w
鉴于电子罗盘易受电磁干扰和光电编码器因车轮打滑等不确定因素导致测角不准确的特点,陀螺仪还需要一个传感器来判断物体的运动方向,可以准确测量运动 发生上述情况时的对象,运动的角度。陀螺仪是一种用于测量运动物体的角度、角速度和角加速度的传感器,可以有效解决上述问题。 7 j% G) d% D8 @
. x0 p4 M& c1 J9 |% n
/ v7 l) p' r& K9 ?. |4 P' R# R- W/ f. C4 @3 T
* f) O. O' F7 I; \4 f) i' v" d/ P% K( R- a+ f4 w. [# p& m+ b/ @
4 G7 |& t' S+ V/ D5 G
1 _/ N# L) g6 z' J5 q' S+ A
$ T/ w5 e4 T- Y. O6 u
9 { ^: _& q! Z$ g
% Y( s( v2 N1 ^( c | 

