|
8 d- k7 {& g9 F
原标题:世隆科技:基于无人船的水陆一体化测量系统
) E c) q6 a2 A) J" U' c: [, K( q8 B9 z/ j" w) e, _8 ?
基于无人船的水陆一体化测量系统以无人船为载体,集成了GNSS、多波束测深仪、激光扫描仪、高精度惯性导航等多种高精度传感器,可选用自动驾驶和远程遥控两种方式对无人船进行控制,采用无线传输的方式,可实时接收并分析处理所采集数据。系统主要由无人船系统、水上水下一体化测量系统和岸基系统3个部分组成,具体如图1所示。 5 J3 D/ J; z$ E! Q/ G- \
 图1基于无人船的水陆一体化测量系统构成 图1基于无人船的水陆一体化测量系统构成
' l$ d. [1 d. I- J ⒈无人船系统
8 r; F( i$ v! a' L 无人船系统为水上水下一体化测量系统的载体,同时具备远程遥控技术、无线通信和高精度定位导航功能,整个系统主要由船体、通信系统、定位导航系统和控制系统4个部分组成。
. b* h0 U& g x3 j* }: O( x ⑴船体。无人船船体采用合金材质,具有船体轻、易搬运、易冲洗、吃水浅、耐腐蚀、耐碰撞等特点,主要承载各类通信设备和传感器,船型设计可保证其在3~5级的风浪条件下平稳航行。 * O+ r0 t; A: u# M v5 d! _. R4 M! L' E
⑵通信系统。是链接无人船系统和岸基控制系统的重要窗口。无人船通过电台通信的方式,实时地将无人船的工作任务状态、航行姿态位置信息传输至岸基系统。另外,用户也可实时获取数据信息并进行浏览查看。 # V' s; [# A5 u/ F/ J* a
⑶定位导航系统。由高精度GNSS接收机提供位置信息,实时定位船体位置。通过通信系统,测量员可在加载了测区底图的软件中实时查看无人船的行驶轨迹和当前位置。
/ M* O+ P: b( d. ?, c ⑷控制系统主要负责控制无人船的航线。测量人员可根据测区的实际情况在手动遥控控制和自动控制两种模式下自由切换,以适应复杂的水域。同时,测量人员通过实时掌握船体状态和测量数据,便于发现错误信息,及时调整航行路线。 6 x3 l1 l! ~" U, t2 S/ o" H
⒉水上水下一体化测量系统 / q# @8 t9 I' x5 L/ d8 I( e
水上水下一体化测量系统为整个测量系统的核心,主要负责采集和记录各类传感器数据。其设计原理如图2所示,主要包括激光扫描仪、多波束测深系统和组合导航系统。测量人员通过操控软件,控制安装在无人船上的水上水下一体化测量系统进行数据采集。具体传感器参数如表1所示。 7 q0 u; m/ v# T8 X) T
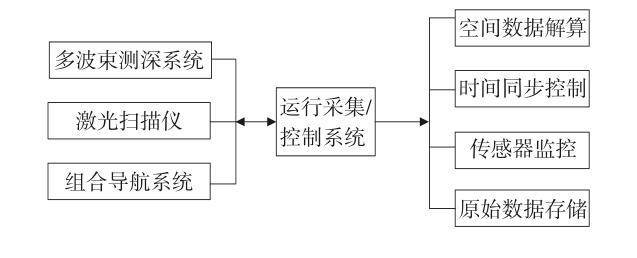 图2水上水下一体化测量系统设计原理 图2水上水下一体化测量系统设计原理
% z+ t- U& W3 {+ E, G* H 表1核心传感器参数指标
3 Y) W+ \, [/ w( q8 T 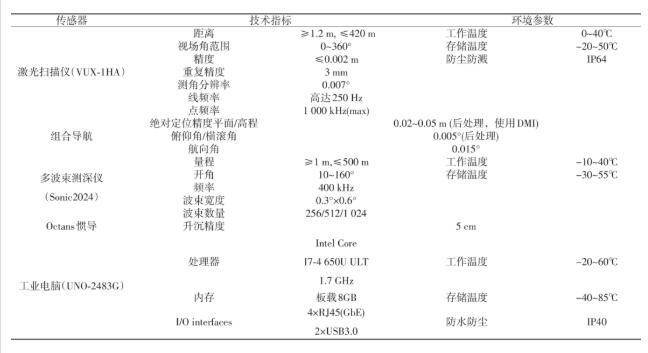
. t# @$ W' ?6 y 系统采用RIEGLVMQ-1HA激光扫描仪进行高效率高分辨率高精度的三维移动测量。其基本原理是根据激光脉冲测得的空间距离、水平方向和垂直方向的步进角距值,计算得到目标点的三维坐标;同时利用全景相机拍摄物体的彩色照片,记录物体的颜色信息,通过将图像与点云数据进行匹配,得到物体的彩色三维信息。 * z# E# n0 {0 v! P
系统采用Sonic2024多波束测深仪,具有60kHz的信号带宽,具有较高的分辨率、数据精度和图像质量。其基本原理是由换能器发射声波,测量发射波与反射波之间的时间差,再根据声速完成水深测量。Sonic2024具有在线连续调频的优点,测量过程中可根据实际环境调整系统频率,从而实现最佳的量程和条带覆盖宽度。根据实际作业测区情况,覆盖角度可在10~160°范围内选择。
O# s; J2 \) P, X3 V. G POSMV组合导航系统(GNSS/IMU)为数据采集系统提供了位置姿态信息。POSMV通过对GNSS与IMU的角速度和加速度数据进行融合,为其他系统提供精确且稳定的定位和定向数据;采用微秒级的时间精度对位置(经度、纬度和高程)、方向(横摇角、纵摇角和航向角)、涌浪、速度和性能指标进行同步,具有定位精度高、稳定性强的优点,绝对定位精度小于5cm。在遇到GPS信号接收不连续或多路径效应的情况下,具有消除定位漂移和快速重新获取信号的功能。 $ m9 f1 s, v: h
⒊岸基系统
* n/ @& x+ ?. U" c6 t9 y 岸基系统由基准站、岸基控制软件和通信系统组成。基准站可根据实际需求自由架设,并向流动站实时提供差分数据链,以获取无人船高精度的位置信息;岸基控制软件主要为PC版软件控制系统,包括参数设置模块、数据采集模块、船体控制模块、数据显示模块、数据处理模块等;通信系统可实时接收、分析、处理和显示无人船的各项瞬时动态信息以及各传感器的工作状态。
% O, b& t+ W" D8 |4 `: z0 k 武汉世隆科技有限公司,SL-MS水质取样监测无人船、SL-M多波速3D双体水文测绘无人船、SL-M单波速水文测绘无人船、SL-P无人巡逻船,水环境应用综合解决方案提供商。 8 w2 b: }# Y! b4 Y7 X( l' ^- |; s
 世隆科技智慧无人船返回搜狐,查看更多 世隆科技智慧无人船返回搜狐,查看更多
" _6 F9 m/ J# w w) A
6 N6 z/ \$ A! q7 Q, S3 k+ x
责任编辑:
% Z2 u- M2 f2 P- R0 Z8 x' h9 z8 E
3 O9 w" e% ?8 y( K
9 F" q* H) E9 B2 I3 }9 e3 Q+ ?1 ?( B6 @: `( J2 B1 R6 L$ v+ C
| 





