|
, V, F6 k7 p/ z1 m& J- t 原创 程 茜 智东西 收录于合集 #机器人 248个
' R* z% K0 E5 i4 c/ C8 `8 m. [7 R 
( W/ t: G, l: d. x& b
机器人“翻车”现场,就这还想主宰人类? . R2 b2 E$ F9 @$ `# H+ E( ^
作者 | 程茜 " q; @. C0 S$ R& ]# {( U9 y" @
编辑 | 心缘
! h1 K; p W0 T4 R7 Q4 v 智东西10月26日报道,上周二,波士顿动力的Spot和Atlas机器人大秀舞技,“复现”了韩国男团BTS的《Permission to Dance》MV,走位、动作都栩栩如生。 3 q( x3 u- L" [6 A

2 I2 Z$ J. T1 V. E; F7 j7 F 机器人开始进军娱乐圈,这是否意味着智能机器人离主宰地球、统治人类的未来又更进了一步?毕竟从它萌芽之初,这样的担忧就一直围绕在它周围。
4 M# C! D* M, P" d! { 不过波士顿动力的机器狗还只是个例,像这样的顾虑现阶段仍然是杞人忧天。 5 `, x5 o0 `3 M
毕竟围观这么多年机器人发展,迄今能走进人们日常生活中的各式机器人,不仅跟碳基生物的智商还相差甚远,而且时不时做出一些或笨拙或愚蠢的行为。
/ ]$ e0 }& L# _: [: z+ l$ A: `# q/ m- g 就连马斯克画了一年的人形机器人“大饼”,也在10月1日举行的特斯拉AI Day上被抬着出场,让不少人感觉,就这? E7 r4 J8 N6 ?% w) e7 x
; `) Z5 ?' X7 R( [5 B2 l# { 半解剖裸露电线版特斯拉机器人,小心翼翼、步履蹒跚地完成了一次惊险首秀。 V/ n% B' ~1 y- Q0 F* C$ X- M
: ~: d. v2 o) S- ?+ [
这些年来,尽管机器人技术一直在进步,但走进主流视野的典型机器人们,总是不时贡献出一些令人啼笑皆非的槽点,特斯拉人形机器人的惊险首秀已经不算什么了,甚至还有人形机器人摔倒、扫地机器人炸家、送货机器人翻车、写作机器人装文化……
! g4 j) J9 J3 t+ [' j7 j8 F0 x 那么问题来了:为什么机器人发展了60多年,却仍然行动迟缓、智商堪忧,并总是存在一些安全隐患? 8 C1 i& S6 x6 R1 L. [; I
本文福利:特斯拉高调入局人形机器人,助推机器人产业链发展,随着智能机器人渗透率不断地提高,应用领域也在不断拓宽。推荐精品报告《机器人新纪元开启》,可在公众号聊天栏回复关键词【智东西331】获取。
: C G# }1 m' M' i 01. % o" h( M7 Z3 W R: j1 ]! d" r0 i
机器人“翻车”现场: ) P# m) {9 l. ~9 E
爬不起来、看不清、抓不住,甚至会致死
' q* Z D# t8 D7 k9 k% D" G+ V 机器人的发展速度已经非常迅猛,从波士顿动力机器人翻跟头、跳男团舞,到扫地机器人解放人类双手、机械臂在工厂内按部就班,不过,看起来突飞猛进的机器人,却夹杂着各种各样的翻车事件,令人啼笑皆非。
& ^8 I+ F8 R4 ]0 ^ 1、控制差:摔倒后自救困难,只能靠人工帮助
$ s. T" S- p- B( D 2021年世界人工智能大会上,人形机器人Walker X本该自信满满地演示快速行走,但没走几步,Walker X却突然蹬腿倒地,直挺挺地趴在地板上,看起来是膝关节部位突然伸直使得人形机器人无法保持平衡,并且Walker X倒地瞬间和人腿部抽筋的状态也十分相似。 , V+ |$ u" P3 x8 B$ g
C# M6 a1 h9 x 不光人形机器人翻车,四条腿的机器狗也出故障了。 / _% \) e! }3 b" W8 u0 A {7 r
今年8月,一个“机器狗买咖啡”的视频在网上大火,有博主购买了宇树科技机器狗Go 1,并让它前往附近的咖啡店买一杯咖啡,但后续发展却啼笑皆非,本来科技感满满又炫酷的视频变得喜感十足。
B: N6 B7 O$ g m* v: Z6 m 在官方发布的Go 1机器狗宣传视频中,它可以从3米高的地方后空翻落地后继续正常起立行走,但视频中Go 1前往咖啡馆时在本该左转的地方却一直往前冲还打了个滚无法起身,不知道它是不是因为意识到走错路了,却没刹住车,情急之下表演了一项杂技来转移人们的注意力。
8 W( @) s& N/ Z1 X 
; R5 W) C9 U" a4 l0 |5 h' S
机器狗经历“千难万险”后,终于到达咖啡店买到了咖啡,正式开启配送之路。但博主为它上面安装的置物筐竟然没有固定咖啡的装置,导致没走两步其中一杯咖啡就光荣牺牲了。又因为地面有洒下的咖啡,机器狗就开始在地面滑步,不能正常行走,咖啡“全军覆没”,最后只能靠博主来实施人工救援。
. m/ l! s* t0 {' j- W 
) {, k& T; e' j/ F1 i4 Y- ~ 2、小“聋瞎”:离谱避障、摸鱼好手,扫地机“发粪涂墙” 5 _. t6 v3 Y9 ~' y0 {6 W1 M3 z
除了控制外,机器人的传感系统出现故障,造成的后果往往令人啼笑皆非。
6 M L$ i8 U3 s1 X* X" W b0 H* O 波士顿动力的人形机器人能翻跟头、跑酷、跳男团舞,谁能想到它也翻过车呢。2017年,在“未来科学家与技术领袖大会”上,波士顿动力的人形机器人Atlas首次亮相,它抱着箱子完美走完一圈后,本来应该停下“谢幕”,却抱着箱子翻下了演示台。
& x8 }# g1 U5 M9 f+ V 不知道它是不是看上了这个箱子,想要赶紧抱走,结果走错了路。
0 z: }3 b5 q) ^ G3 h9 e: y3 G/ `/ W 
. b, Q5 C" R& L1 }9 O. t* x% ?
人形机器人即使翻车,但离我们的生活仍然很遥远,像消杀、导购、扫地机器人现在几乎随处可见,它们遇到故障往往也会波及人类。 " Y3 g* }2 t; W" X8 c
新冠疫情爆发以来,边溜达、边消毒的消杀机器人时常会出现在商场中,但下图这个消杀机器人在执行任务时,本应从开门的位置顺利通过,但最后它几乎是蹭着门的边缘硬挤过去的。不过,消杀机器人只要消杀到位,怎么到达下一个目的地其实是不是也不重要。 + g1 l* l- ? V4 }: o5 @+ z

4 s8 D V/ m( e9 E5 D: {6 V3 e$ \
还有商场里出现很多的导购机器人,省去了我们问路、导航的繁琐过程。
( A- g8 V% W* T% A 不过本来应该乘坐直梯或者只在商场的一层内工作的福州中防万宝城导购机器人,在2020年12月25日,却试图乘坐自动扶梯下楼,这就显得有点自不量力了。 " O3 z- Z: h6 Q. u1 x6 \* ?
刚挨到传送带,它就从自动扶梯上翻滚而下,还撞到了前方的两位乘客。正常情况下,导购机器人的底盘面积远远大于自动扶梯供人站立的面积,因此它应该会主动避开这类地点,以防自己摔倒。 0 M$ {* ], ?& p
. c9 n4 A1 ~: N1 e- U
上面两类机器人可能只是看起来有些智障,但下面这个就是“闻起来”令人绝望了。友情提醒,吃饭时请忽略下图,这是一张有味道的图片。
) a8 ]& Z, b5 ~* R 现如今,能扫、能拖的扫地机器人已经成为我们居家生活的好帮手。但今年6月,北京一男子的扫地机器人在地板有狗狗大便的情况下,仍然兢兢业业的打扫完全屋,而他的另一台负责拖地的机器人在识别到前方的粪便障碍物后就停止工作了。
9 e, C l' Z2 n; o' m Y 
3 i1 o5 i y A( g
上面说的可能是机器人识别上翻车,而下面这个机器人直接在工作时开始摸鱼。网友戏称:这个热狗机器人像极了上班摸鱼的我。
) r( P) d8 Z% z! F 路边的热狗机器人本来是为过路的打工人提供24小时服务,在饥肠辘辘的时候能吃到一个热气腾腾的热狗。但你有经历过买了一个热狗,却只有面包吗?这个热狗机器人在“组装”热狗和面包时,分别将它们放到了两个架子上,然后只把面包装进了包装袋,丝毫不顾及旁边的热狗。 2 a: F1 f$ u! S0 |, R, p) ^. j* q: T
2 j+ k1 Y) z- M+ ~* ^ 不仅热狗机器人,能写一手好字的书法机器人也开始摸鱼了。
6 T9 }- i; q! u1 Y f 2021年11月,机器人制造企业ABB在进博会上展示了一个书写机器人,演示过程中它需要模仿中间纸上的“进博”二字,它提笔、沾墨、写字一气呵成后,纸上却并没有出现字?原来是它的笔尖并没有落到纸上。
0 ?5 |9 S/ P$ ^; k3 A 随后,书写机器人也立马补救,写出了漂亮的字,但人们对它翻车的关注明显更高。
1 K- R$ k$ [0 g, g9 x9 n2 O( |: Q 
1 z. {: O8 i0 S6 X
此外,还有一种和导购机器人形态类似的安保机器人,只不过它们的工作场所是在室外。 7 r) S; E4 @ T: a* a m9 o
美国机器人创企Knightscope的安保机器人K5,是专门为停车场、校园、医院的安保巡逻而设计,能够应对复杂多变的地形。
( L! k) w! r# L5 P 不过2017年7月,K5在熟悉了华盛顿一处办公楼附近环境一周后,却发生了掉到喷泉里的惨剧,几乎被“淹死”。当天各大报纸的头条都在大开脑洞,试图为它“自杀”找一个合理的解释,又说它是因为厌倦工作,还有说因为失足跌倒,却没有“手臂”支撑它站起来。
; a7 s, Q9 V1 j0 Y+ o 
7 y) U: I" C% d 美国出租车企业Uber也聘请了安保机器人K5进行巡逻,但这次事故相比于“淹死机器人自己”则更为严重。 1 Z8 l, Y8 b0 T* s% K3 U
2016年7月,K5在美国加利福尼亚州的斯坦福购物中心巡逻时撞到了一个16个月大的小朋友,当他面朝下摔倒后,机器人并没有停下来,而是继续开走了,仿佛什么都没有发生。
% \2 u. x4 P3 H6 J# K' d: _8 X, D 
2 [2 n4 B3 R5 {% \! S 3、失手:机械化操作,不能灵活变通而伤人 $ T$ f& l: Y4 L( y
机器人在实际应用上,本该展示它们高超的自动化工艺,或者精湛的下棋、巡逻技艺时,往往会出现因严格遵循流程,不能灵活应对突发情况的事件。
8 Y C# a3 b, k' v0 k l 今年7月,莫斯科国际象棋公开赛上出现了特殊的选手——象棋机器人。本来是比拼棋艺的激烈场面,象棋机器人却一把夹住对方棋手的手,导致小朋友手部受伤。原因好像是小朋友本来已经下子,却想调整一下,而象棋机器人则不能灵活变通,失手伤人。
, Q; U, [4 W/ D- X3 p0 { 不过不得不说,机器人在遵守规则方面真的很严格了。 " O$ c3 }0 P: G; ?9 X

2 g- a9 v& c+ [5 S3 t: I
其实下棋机器人现在还不常见,但电商仓库、汽车制造工厂中,为了节省人力成本,往往会安装成百上千台机器人来代替人工完成重复性工作。
7 r' j" s% D" g3 t' T( { 但与上述原因一致,过于遵循预定的流程,就会导致突发变故时难以及时调整机器人的动作。
. P3 M8 G# u& R1 v% \6 k4 w: j 2021年12月,美国新泽西州亚马逊仓库因机器人发生了惨案。一个机器人在工作过程中戳破了有毒的防熊喷剂,导致80名亚马逊员工身体不适,24名员工因为有毒气液外泄而被送医。
J# E5 D% t! V 
+ n. d5 h2 E/ M& n2 Z ] 在汽车制造工厂中同样如此,2015年8月,印度汽车配件生产公司SKH Metals的24岁工人Ramji Lal,在工作时被一名机器人杀死。 ; y0 ^( L9 ]' t4 r* @
他的同事说:“机器人经过预先编程,可以焊接由它抬起的金属板。在生产过程中,一块金属板脱臼了,Ramji Lal从机器人后面伸手去调整它。但预编程的机器人直接用焊条刺穿了他的腹部。”
: f/ }9 V: q4 n( Y# H' N" N; E 
$ ?- X: d2 f) A+ H; V, R& j: Z 4、晕头:多机协同无法灵活变通,一台故障全部“歇菜”
3 ?$ I2 l5 o+ E4 \# B 尤其是大型工厂内,经常会有很多分拣、配送机器人来协同工作,它们每天各司其职,使得货物分拣、运送等工作流程都十分高效。
z& M( }% Z R' H: e5 E! ^2 p' e" S( x 但2021年7月,英国电商网站Ocado分拣机器人发生碰撞后引发的火灾足足燃烧了18个小时。 2 f+ v5 v5 \* C( J. s- R

' o1 N$ g+ E/ Y, @* P* ? 5、智障:人机对话时经常“鸡同鸭讲” # I" W* {/ w$ F5 F9 t, U7 {/ x
安保机器人还发生过一件糗事。
2 ?' g! t# Z7 n( J2 n" } 诸如下图的美国加州安保机器人,在巡逻时,理应让人们获取帮助时更加便捷,但一名女士向安保机器人报案时,该机器人非但没有受理案件,还为她唱了一首歌,不知道是不是当时已经到了安保机器人的下班时间。
& R$ N0 S) Q0 R" e5 R 
9 d' _4 Q6 X* X2 O 02.
( F( o. _2 T: x6 u7 J7 N 机器人智障背后的秘密
: E8 x! J; V, P$ k* T& X 软件、算法要背锅 ! v8 t/ s4 ~! W, Y; z
回到刚开始的问题,为什么机器人仍然看起来不够聪明?想回答这个问题,我们可以从机器人是怎么动起来的入手。 7 H% }7 p. G6 ^
顾名思义,机器人就是“机器”+“人”,如果机器人的运动行为难以理解,我们可以先想想自己。当眼睛看到前面有石头,把这一传递给大脑,大脑将需要采取行动避开障碍物的信号传递给四肢,然后我们抬腿迈过石头。 ( b4 b7 Q* z& W( A; p/ n
我们再放到机器人系统中来看,机器人中的传感系统对应的就是五官,控制系统就是大脑,而驱动和执行机构在人体中可能没有具体对应的位置,但可以近似看作我们的四肢和关节等。 + B; s8 X% o# a
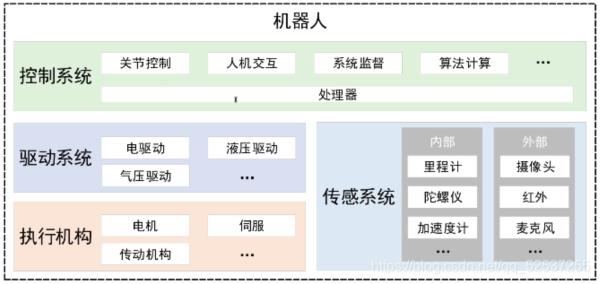
* B1 q- S! |# `. C+ j( U ▲机器人四大系统(图片来源:CSDN) 6 w6 K- X! ^- m, _
现在看来,机器人很多行为表现智障到令人无语。带着这个疑问,智东西对话了机器人行业的多位资深人士后,我们发现背后的原因与上面的四大系统密不可分。
8 i [( V3 ?7 K, S* ^, q* K 1、控制、驱动系统:机器人已经可以平衡控制,特殊场景有待优化
+ i$ [, D& ~ i: ~ 小婴儿最开始学的就是走路,和机器人一样,不论是双足、四足、轮子和履带机器人,最先学习的就应该是保持机器人动态平衡。这些形态的机器人在保持平衡时难易程度不同,其中和生命体形态类似的四足、双足机器人是技术难度较高的。
4 j. C* }3 t8 {& r8 |% I! k, {: ` 原因是这类形态的机器人足部与地面接触面积很小,再加上材质硬度较高,就好比你穿着滑冰鞋走在地面上时,也很容易失去平衡摔倒。
; M+ P4 d' h m% U9 ~; k& o2 U 
/ W* d2 c6 H0 [9 q4 g* ~: o ▲机器人形态 2 _- k; _4 C# R+ P) K
我们回过头来看机器人翻车集锦里的“机器狗买咖啡”事件,久平科技创始人、CEO王雪松说:“其实从完整的视频中可以看到,在机器狗摔倒之后,它有明显的自救行为,但可惜因为地面有咖啡,导致并没有自救成功。”
1 h. A! ^7 S5 A1 V- v 从根源来讲,如何在有咖啡等液体的光滑地面正常行走?这个问题属于常见情况中的特殊情况,也就是说,我们不可能在刚学走路时就学习穿着滑冰鞋在冰场里滑行。王雪松谈道,未来,机器人研发过程中可能会针对于这类特定的场景进行研发。
4 u6 h+ O5 n) U/ s) Z4 h; r- c 在让机器人动起来的环节中,还有驱动系统的关键部件——驱动电机,顾名思义,就是驱使机器人运动的系统。超级骆驼联合创始人兼智能装备负责人庄子骏谈道,对于机器人本体来讲,现在国内机器人玩家面前的难题还在于驱动电机的国产化、小型化。其中,波士顿动力的机器人驱动方式采用的是液压驱动,而其他特斯拉、小米等机器人都采用的是电机驱动,我们可以简单理解为前者是靠液压油的压力势能,后者是靠电势能。 3 G/ ^% E+ s) M, e' i6 ]. ]5 p
就实现效果而言,机器人电机的能力已经可以满足机器人一般场景下的使用。但在为机器人提供动力的同时,如何使其更加微型化、轻量化,占用较小面积就能达到相同的功效也十分重要。毕竟体型越大的机器人体内所需的精密零部件也就越多,理想情况下当然是部件越小越好了。 9 R: A9 [/ i! q; R% t
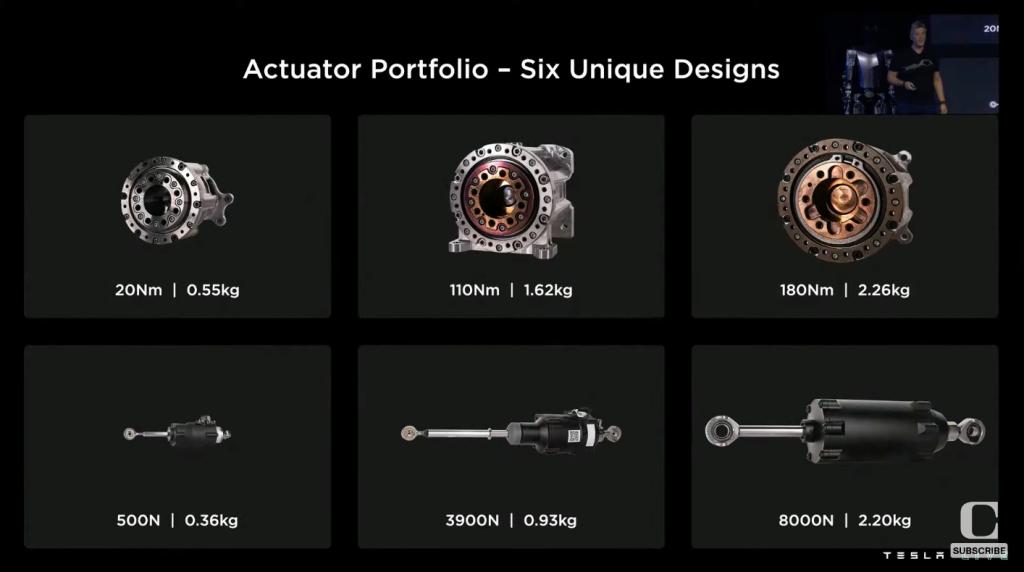
( g; F6 e) Q0 Z0 ~9 l" D" f' h
▲特斯拉人形机器人的6种驱动电机 0 ^( ~( T' B. d4 z, o5 Q) Y
2、传感系统:纯线条不能识别粪便,模拟人眼构建三维视图
' h8 F; I w0 z5 o+ u9 g& e 令人印象深刻的机器人翻车事件莫过于扫地机器人“发粪涂墙”了,而这也和机器人的五官密不可分,除了看到还需要让它们看清前面是什么,到底能不能清扫,会不会搞坏自己。 $ }9 |) i( w$ w- V
因此,模拟人眼的3D视觉方案就是目前最有效的。
4 [5 v- Q: k- f% G: |2 n' _+ A 机器人的视觉感知系统主要包括激光雷达、3D视觉两种。激光雷达就和智能汽车上的一样,其工作原理是,向前方的目标发射探测信号,然后将接收到的从目标反射回来的信号进行适当处理,获取前方目标的相关信息。
6 Y% E9 L- D& a* Y) | 值得注意的是,这种信号是线条状的激光束,因此只能让机器人感知到前方的物体形状或者前方有障碍物,并不能明确物体形态到底是什么。 # ^- T; r. d1 N( b
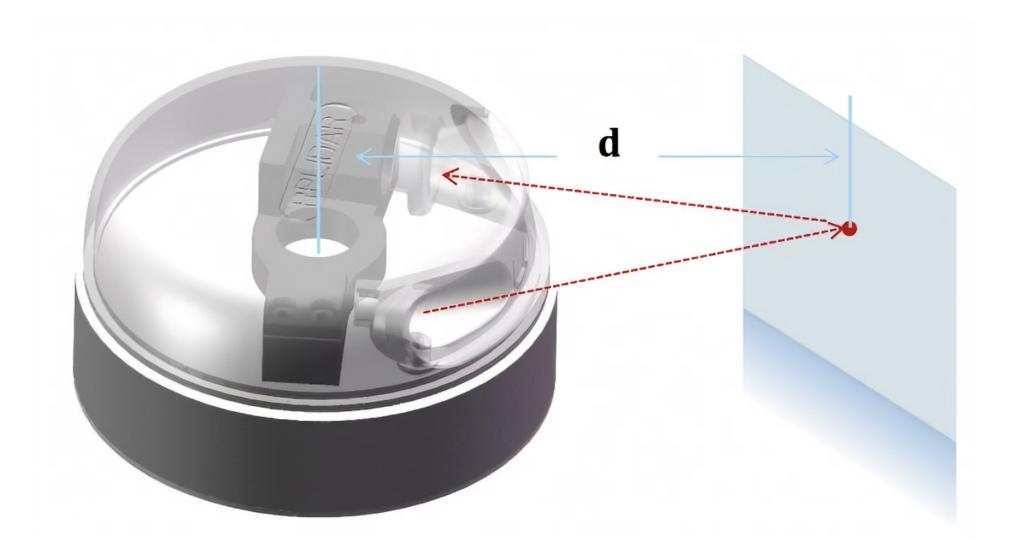
5 l$ E; Z* M' @3 n4 S' C; p
▲扫地机器人激光雷达三角测距原理(图片来源:思岚科技)
2 L3 z- j( O; p. ^! X! ` 但是即便单用激光雷达不能实现更好的感知,让机器人玩家做纯视觉方案也很难,这背后的难点在于对算力、芯片的需求。因此国内一些机器人玩家采用了激光雷达和3D视觉相结合的方案来进行感知,这样在算力和感知能力上都得到了一定的提升。 + i" m# Z9 s. h- z
不过,算力、资金在特斯拉面前都不算什么难题,特斯拉的人形机器人“擎天柱”采用的就是纯视觉方案。超节点创新科技林智宾说:“特斯拉能做机器人的一个原因就是,它将做智能汽车的HW3.0系统移植到了机器人算力系统中,可以支撑起视觉计算。” 3 A* \1 Y7 K* D# _2 ~
. w6 e' d% e; d Y6 \' x' I! x
▲特斯拉人形机器人的视觉方案演示 0 ]9 S) ^8 G0 N4 O
除了算力要求外,这背后的研发成本、人才储备也让机器人玩家苦不堪言。林智宾补充道,随着自动驾驶、无人机、元宇宙等领域对视觉人才的需求不断增多,机器人玩家在这其中的竞争力稍弱,因此视觉人才的储备对于机器人玩家来说也是一大难题。 / p. \) Y% ] r4 S7 T
这也导致,最近几年拥有3D视觉的扫地机器人大多出现在高端扫地机器人设备上,如今年3月,iRobot的旗舰扫地机器人Roomba J7就采用的是视觉避障技术,而这款扫地机器人的价格高达849美元(约人民币5500元). ) f& z3 B: A) E- g

; E: C1 K0 w0 N# ?& ^; I s: Q ▲iRobot的Roomba J7可以识别粪便并及时避开 $ [, c7 _) m) _7 A3 u6 N
此外,即便机器人通过视觉感知到前方物体,但其识别事物特征的方式与人类不同,如人类在识别猫的种类时,可能会通过毛色、长短、眼睛和耳朵的形状、叫声等,但计算机也许是通过别的特征来进行判断。 # ~0 Z+ a' s( ^6 z
因此,研发人员可能只能看到其识别结果,而无法从精准优化其识别过程。
2 e+ ~# g9 o ` 3、软件:机器人成长还不成熟,无法应对特殊未知情况 6 X9 a7 U) X) t8 J! X
再从更加宏观的技术角度来看,久平科技创始人、CEO王雪松告诉智东西,机器人在硬件领域的基础设施已经相对成熟,没有特别大的技术难点,在一些关键零部件上基本成熟。“走的颤颤巍巍的原因更多还是在软件、算法上。”
C- c; {/ H* d8 C5 F; @ 机器人的灵活性已经可以满足一般需求,而上面说到的突然摔倒、发生碰撞等情况,可能和其传感器突然失灵有关,与其硬件本身的关系不大。
( X& z$ v; T `; P: A 人在生活、工作时也会遇到陌生的环境不知道如何应对,只能是第一次见过后积累经验,所以对于机器人也是一样,研发人员不可能在设计初期就考虑到所有的情况,因此只能针对常见的情形对其优化。
0 z, ~: {: o& F/ G “这背后的关键其实不是机器人研发的难点,而是机器人要做什么,也就是通用和专用机器人的区分。”王雪松谈道。通用机器人可能是智能化程度极高,可以像人一样灵活变通,做到“我是一块砖,哪里需要哪里搬”,王雪松也坦言,他认为只有当底层的算力、算法实现突破,这一愿景才能实现,因此,现阶段他更倾向于专用型机器人。 ! F+ M/ _! ~' q2 H2 i
机器人作为一项技术,和人工智能、5G等一样,更多是为现有的一些工具服务,为其进行智能化升级,因此,面向细分场景的机器人,或者说能够做到“在其位谋其职”可能是目前更应该考虑的发展方向。
/ }5 x. A. I6 S) @: |4 c5 Y* Y 可以看出,目前为止,机器人的技术进展已经走在前面,使得机械臂、扫地机器人等能够在工厂、家庭里帮助人类做很多事情,但软件层面的不足让其真正落地、普及还是一大难题,因此,但看机器人现在的智障行径,离统治地球、主宰人类还很遥远。 ; g- H/ v4 A& D+ }* v
03. H9 O" }5 Z: P
机器人研究百花齐放 8 ~- a Q& i. R" \ V
“发粪涂墙”正在成为过去
6 L1 v3 h9 {* J7 {8 X' |7 v J 虽然机器人看起来还很智障,但学界百花齐放的研究成果让人看到这一产业正在飞速发展。 , ~% |) M L* l1 E5 H% n
一直以来,模拟各种生物体的仿生机器人就是各大研究机构青睐的领域。 8 U7 T: S: u" e# T) J, T
今年10月,美国耶鲁大学一只两栖机器龟(ART)登上了国际学术顶刊Nature的封面。作为一只两栖“动物”,它可以变换形态,让四肢在地面、水里都顺畅行动。
1 s: j; y1 _: {5 `" V 不过看其在地面行走的时候,仍然十分笨拙,像刚刚学会走路的小婴儿。
+ r1 ?- N; x# s. |5 L; z. C 
: P- L; P7 }. M7 c" p ▲两栖机器龟在耶鲁大学校园里爬行 8 R& ]* a8 F1 V& v
有时候机器人在搜救、巡逻时往往会面对范围特别大的情况,一台机器人想要执行搜救任务就会费时费力,因此,机器狗间的多机协作也是机器人界的一大研究方向。
4 v$ j W/ }0 s; m- S# c 今年10月,四足机器人研发创企云深处的5台绝影X20四足机器人,自主规划、决策,完成了在3000平米未知环境下对8个模拟目标的协同搜索。在搜索过程中,它们还会及时“沟通”,避免搜索到重复区域,还能共享进展,这样看来,机器狗搜救不仅能标记已搜索点,还省去了稍显古老的对讲机设备。
' {( |/ r+ L! H" X- s 
- U1 l' _8 e, E/ Q; {( C0 ? ▲云深处5台绝影X20四足机器人协同作业,实时共享搜索数据 : a* P7 E; O$ }- }( }9 l
前面说到,软件是阻碍机器人智能化的关键,那么如何在短时间内让机器人更聪明也就十分重要了。
$ `' f/ b" c& _" `. f 今年8月,谷歌重磅研究进展公布,通过结合更强大的人工智能大型语言模型,使得机器人执行命令的成功率从61%提高至74%,这项研究让机器人从被动执行向主动执行、感知跨越了一大步。
! y0 ]0 H# O: n" Y: r6 ] 这些介绍听起来可能难以理解,举个例子,比如,当你问机器人:“我把饮料洒了,你能帮忙吗?”谷歌机器人可以迅速筛出适配指令的合适行动,然后从厨房拿块清洁海绵来。但一般机器人可能只有当你完整说出:“我的饮料洒了,你能去厨房拿块清洁海绵来吗?”,才有可能理解你的意思。
3 I3 |# ?9 L* n" a# \; | 
: s8 S% O. ^7 p E$ |. U- I( a ▲经训练的机器人拿可乐 / {) d& C; O# l1 c* m( f$ d6 @
传感系统上,我们看到更多的可能还是视觉,但很多研发人员已经将视野拓展到了味觉和触觉。
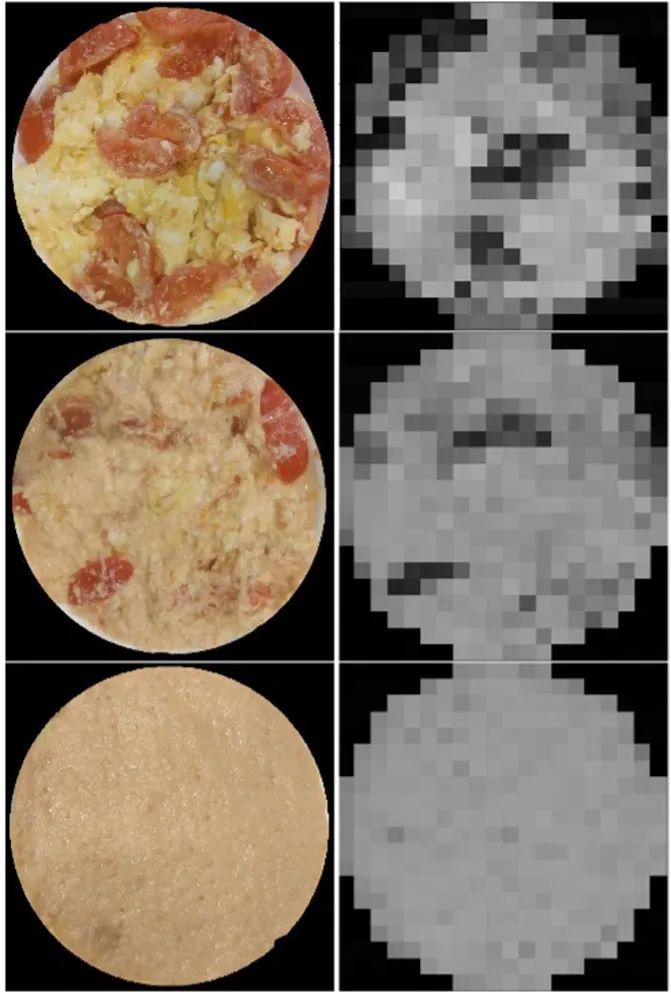
+ Y% c- a( F, m 今年5月,英国剑桥大学研发人员为机器人增加了“味觉”,机器人厨师能够尝到西红柿炒鸡蛋到底咸不咸,并一步步调整。 / r- U0 v$ A% t6 W) j9 C6 `
事实上,机器人并不是真的尝到了咸的味道,而是通过基于电导的味觉传感器的UR5机械臂的实验装置,通过混合食物模拟咀嚼、电流传导复现盐的味道,帮助机器人品尝食物的“味道”,也就是用电信号来表示咸信号。 9 y3 h, f4 v+ X2 ~- j
0 y+ ?% F0 p# Q5 z$ C
▲机器人生成的味觉图 & M8 V) e/ K0 I/ t
触觉的研发进展则更令人惊艳。工业机器人搬箱子、举重物都不在话下,但它们遇到材质轻巧的千纸鹤该怎么办? - ?1 @7 z5 ?7 \* R# t4 i# t
今年4月,英国布里斯托大学研究人员为机器人研发了TacTip(人造指尖),也称“光触觉传感器”,装上这个人造指尖,机器人的手指就可以控制力道,轻轻提起千纸鹤,而不会只管运送不顾千纸鹤是否完好。
+ _( M, t) x6 N$ Q# B7 f1 G$ ^ 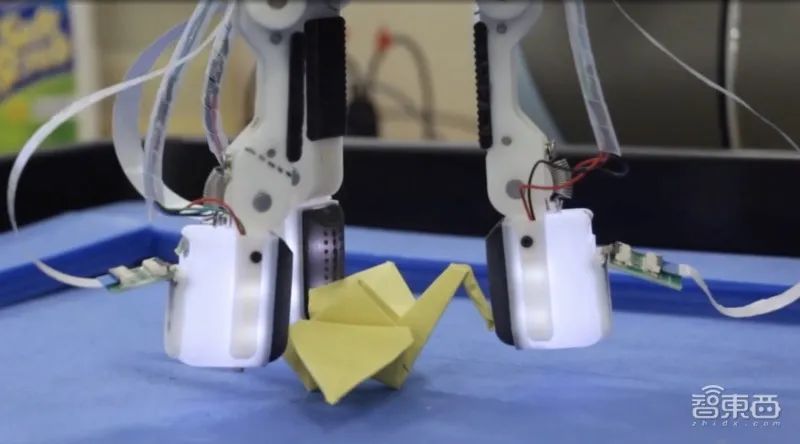
" q* f4 d" x8 u1 D6 Y: S
▲装备了TacTip的机器人成功拿起千纸鹤
/ A5 g! |6 u! x …… # _+ e7 r5 M# f/ Q! B2 e# ?
这些研发思路对于机器人而言都具有极大的积极意义,未来一旦应用到机器人研发、设计、生产上,将会大大提升其落地应用的潜力。
% _9 R' }& m( `5 b4 y! j3 s 究其根本,这些研发的方向都离不开机器人最基础的传感、控制、驱动、执行四大系统。
& c3 S( Q+ B _ 在视觉层面,现在味觉、触觉传感器距离落地应用的机器人可能还十分遥远,视觉感觉是目前最为常见的。因此,机器人如何行动的“把关人”就是视觉,但只有视觉是不够的,“现在除了视觉外,还需要AI来提高机器人的估计能力。”林智宾补充道。 * x0 d8 M `- o+ Y8 K
我们可以举一个最简单的例子,当扫地机器人识别到前方有粪便时,它需要做两件事:识别到粪便、在合适的地方绕开,如果它远远地看到粪便就绕开,那么中间很长一段距离就不会被清理到。因此,估计扫地机器人到障碍物的距离、提高AI识别能力也是各界玩家在研发的主要方向。
1 w; }0 G4 k& [+ B; }; C1 z 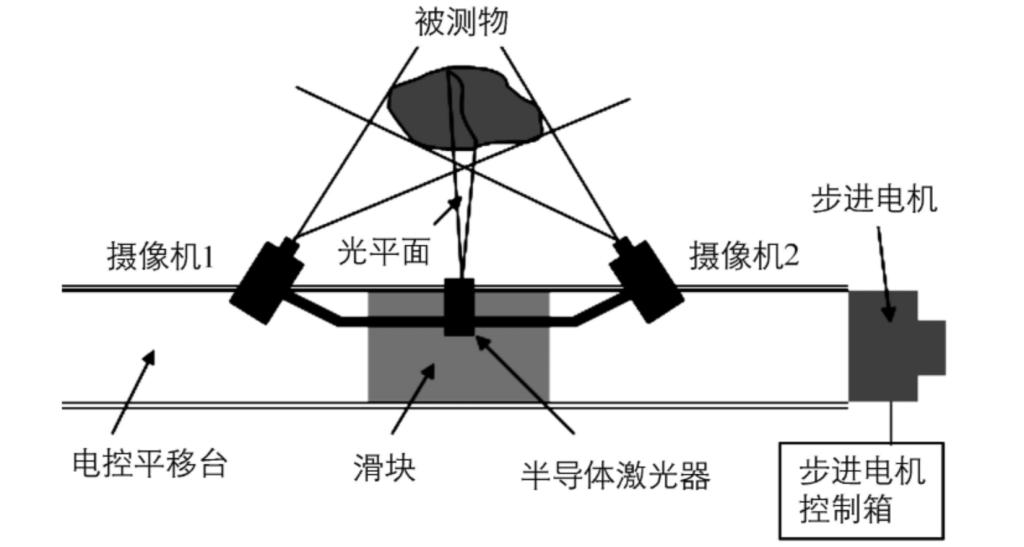
( K3 E9 @0 d, M. }4 V% x
▲双目视觉的成像原理 7 ^# y: h+ `9 S
现阶段最有效的解决方案可能是双目3D视觉,这其实就是为了模拟人的两只眼睛,能够同时从多方位、多角度看到物体,这也就是为什么人看到的世界是立体的。利用这种视觉方案,机器人就可以计算距离,在合适的位置及时避开。 ; |" J3 H G" v4 S
为了加快机器人应用落地,机器人的强化学习和虚拟环境训练进程也在加速。
2 d. s7 A' ?9 v* z4 c9 E 你刚出生的时候,不会拿筷子、不会走路,在日复一日的积累、观察下,你掌握了越来越多的技能,而这也就是机器人的强化学习,从自己的经验和行为中不断学习,比单纯靠其他人一点点教学的方式简单多了。
& Q6 A' ]8 ]% M- g. C/ `' j0 Z 这种做法不仅能缩减机器人训练的时间和成本,在提升其智能化上也更有效,能够让机器人自己驱动、控制关节来执行指令,甚至产生让研发人员意想不到的惊喜。比如,以机器狗为例,研发人员初期并没有将应对湿滑地面作为主要的优化方向,但通过机器狗的自我学习,也就是买了一次咖啡后,就增加了这个特殊场景的经验,之后或许可以及时识别前方地面上的液体并及时避开。
; k; m2 H6 |0 B& y 除此以外,机器人的训练成本其实非常高,如果在实际场景中训练,机器人容易磕碰,研发人员需要花费金钱来维修,如果造价昂贵只有一台的话可能还会拖慢研发进度,因此,把机器人搬到虚拟世界中训练的想法就出现了。王雪松谈道,他们一直在使用这种方法训练机器人。 $ m! e$ a, i0 ?: {' I; ]
今年10月,Meta(原Facebook)和纽约大学的研究人员提出了一种训练机器人的新框架HOLO-DEX,机器人训练不再需要“真刀真枪”演练,人带着VR(虚拟现实)头显置身虚拟世界,就可以教机器人“学习”。这些VR、AR等技术与机器人技术的结合,在不断的碰撞中,又在加速机器人智能化、灵活性的升级。 $ D! Q8 u4 z' n; B! Q" j- a' I
总的来看,机器人的研发思路还是要回归到它到底要做什么这一问题上来,它作为一项技术,需要解决实际场景中的实际问题。因此,庄子骏认为,未来一定是由场景定义机器人。这些研发的进展也都遵循着这一观点。 ! Y4 F: ?$ X. j) a2 A
04. " p: E* P6 B$ V: o5 Z6 D5 ]1 W
结语:机器人的未来是星辰大海
& F/ n4 r7 t) i. O" a T, E8 s$ I 机器人这一看起来外形炫酷、对极客而言吸引力巨大的新物种,一直是人们热议的话题。此次,马斯克的人形机器人“擎天柱”更是再次将其推上话题的中心。
1 a; s6 n9 U) z* E3 L; B 但目前而言,人们对于机器人的期望仍然过高,即使在硬件层面上已经破解了多道技术难题,但作为未来被寄予厚望的机器人而言还远远不够。梦想可以天马行空,但技术进步还是得一步一个脚印。仍有很多悬而未决的技术难题,有待研究人员和工程师们持续探索。
2 d& f7 J/ b0 D+ l" K6 [ 特斯拉人形机器人即便在发布时走的颤颤巍巍,但该公司对机器人研发的重视程度,及其在自动驾驶领域的技术积累,都进一步提振了这一产业。不过,想要实现如马斯克所言让机器人真的走进家庭,还是难度很大的一件事。 ; U6 @ B) }9 ` o) e* _3 H6 q' _0 j
本文福利:特斯拉高调入局人形机器人,助推机器人产业链发展,随着智能机器人渗透率不断地提高,应用领域也在不断拓宽。推荐精品报告《机器人新纪元开启》,可在公众号聊天栏回复关键词【智东西331】获取。 ) U$ R/ ?8 i; e$ d
(本文系网易新闻•网易号特色内容激励计划签约账号【智东西】原创内容,未经账号授权,禁止随意转载。) . R6 h* Z9 T3 a0 X' y6 I
原标题:《让人啼笑皆非的机器人翻车现场,揭示了多少行业真相?》
9 M5 ]. u! Y, s5 o
0 u# x6 [) k, H5 c
6 v S/ `& F( n' A, B; D: ^# U n: B: U0 ~" Q1 r
$ e! c8 \0 h3 Q1 {/ @3 k* v F) m
8 [8 `$ c) S9 B6 _( H, w9 g& Z& K V$ C1 d* s
6 K8 y% }, j8 t5 r/ n& I* D* }( H6 G, t
| 

