7 G2 h0 k$ m* j- R3 m& t0 p1 |
0 I. V, j8 F+ L ж°ҙдёӢең°еҪўжөӢйҮҸзҡ„дё»иҰҒд»»еҠЎжҳҜзЎ®е®ҡж°ҙдёӢиө·дјҸеҪўжҖҒпјҢдё»иҰҒеҶ…е®№еҢ…жӢ¬жөӢж·ұе’Ңе®ҡдҪҚгҖӮжөӢж·ұдё»иҰҒйҮҮз”ЁеЈ°е‘җиҝӣиЎҢпјҢе®ҡдҪҚж–№ејҸдё»иҰҒжңүе…үеӯҰе®ҡдҪҚе’Ңж— зәҝз”өе®ҡдҪҚгҖӮжңҖж—©йҮҮз”Ёе…ӯеҲҶд»ӘгҖҒз»Ҹзә¬д»ӘжҲ–е…Ёз«ҷд»Әзӯүи®ҫеӨҮйҖҡиҝҮеӨ©ж–Үе®ҡдҪҚжҲ–иҖ…е…үеӯҰе®ҡдҪҚзҡ„ж–№жі•зЎ®е®ҡе№ійқўеқҗж ҮпјҢйҮҮз”ЁжҪ®дҪҚи§ӮжөӢзҡ„ж–№ејҸиҝӣиЎҢйӘҢжҪ®гҖӮйҡҸзқҖж— зәҝз”өе®ҡдҪҚжҠҖжңҜзҡ„еҸ‘еұ•пјҢеҹәдәҺе…ЁзҗғеҚ«жҳҹеҜјиҲӘзі»з»ҹпјҲGNSSпјүзҡ„з©әеҹәе®ҡдҪҚжҠҖжңҜжҲҗдёәж°ҙдёӢжөӢйҮҸдҪңдёҡзҡ„дё»иҰҒе®ҡдҪҚжүӢж®өпјҢиҖҢе®һж—¶еҠЁжҖҒиҪҪжіўзӣёдҪҚе·®еҲҶпјҲRTKпјүжҠҖжңҜеӣ е…¶еҸҜе®һж—¶жҸҗдҫӣй«ҳзІҫеәҰдёүз»ҙеқҗж Үзҡ„зү№зӮ№дҪҝеҫ—ж— йӘҢжҪ®ж°ҙдёӢең°еҪўжөӢйҮҸеҫ—еҲ°дәҶе№ҝжіӣеә”з”ЁгҖӮдҪҶжҳҜпјҢRTKжҠҖжңҜйңҖиҰҒйҖҡиҝҮж— зәҝз”өзӯүж–№ејҸе»әз«Ӣе®һж—¶ж•°жҚ®й“ҫжҺҘд»Ҙдј иҫ“иҪҪжіўзӣёдҪҚе·®еҲҶж•°жҚ®пјҢеңЁе®һйҷ…жөӢйҮҸдҪңдёҡдёӯпјҢз”ұдәҺзҺҜеўғзҡ„йҷҗеҲ¶пјҢйҖҡи®ҜдҝЎеҸ·е®№жҳ“еҸ‘з”ҹжіўеҠЁд№ғиҮідёўеӨұпјҢйҖ жҲҗе·®еҲҶж•°жҚ®й“ҫжҺҘеӨұж•ҲпјҢиҝӣиҖҢеҜјиҮҙе®ҡдҪҚзІҫеәҰдёҘйҮҚиЎ°еҮҸиҖҢж— жі•ж»Ўи¶ізӣёе…ідҪңдёҡ规иҢғиҰҒжұӮпјҢиҖҢж— йңҖе®һж—¶ж•°жҚ®й“ҫжҺҘзҡ„GNSSиҪҪжіўзӣёдҪҚеҗҺеӨ„зҗҶпјҲPPKпјүжҠҖжңҜеҸҜиҫғеҘҪең°и§ЈеҶіиҜҘй—®йўҳгҖӮиҜҘжҠҖжңҜеҸҜжңӣеңЁжө·жҙӢе·ҘзЁӢе»әи®ҫгҖҒж°ҙеҲ©е·ҘзЁӢе»әи®ҫгҖҒжёҜеҸЈиҲӘйҒ“е»әи®ҫзӯүж–№йқўеҸ‘жҢҘйҮҚиҰҒдҪңз”ЁгҖӮ
& o4 ?: Z3 k& D0 ^, k& y1 C/ [" \  6 E8 j. t8 Q/ h+ T
6 E8 j. t8 Q/ h+ T
0 y6 ]1 W+ s0 O, L еҹәдәҺPPKжҠҖжңҜиҺ·еҸ–й«ҳзІҫеәҰдёүз»ҙеқҗж ҮжҳҜеҪ“еүҚзҡ„з ”з©¶зғӯзӮ№д№ӢдёҖпјҢеӣҪеӨ–еңЁжӯӨж–№йқўзҡ„е·ҘдҪңиҫғе°‘пјҢиҖҢеӣҪеҶ…е·Із»ҸејҖеұ•дәҶиҫғеӨҡз ”з©¶пјҡжұӘиҝһиҙәиҒ”еҗҲе…Ёзҗғе®ҡдҪҚзі»з»ҹпјҲGPSпјүзҡ„е®ҡдҪҚдҝЎжҒҜе’ҢжғҜжҖ§жөӢйҮҸеҚ•е…ғпјҲIMUпјүе§ҝжҖҒдҝЎжҒҜиҺ·еҸ–дәҶзһ¬ж—¶ж°ҙйқўй«ҳзЁӢж•°жҚ®пјҢ并еңЁзғҹеҸ°жёҜиҝӣиЎҢдәҶе·ҘзЁӢиҜ•йӘҢпјҢз»“жһңиЎЁжҳҺпјҢйӘҢжҪ®и·қзҰ»й«ҳиҫҫ98kmж—¶пјҢйӘҢжҪ®зІҫеәҰд»ҚдјҳдәҺ10cmпјӣиөөе»әиҷҺзӯүеҹәдәҺGPSдәӢеҗҺеҠЁжҖҒеӨ„зҗҶжҠҖжңҜејҖеұ•дәҶиҝңи·қзҰ»й«ҳзІҫеәҰжҪ®дҪҚи§ӮжөӢпјҢеҜ№еһӮзӣҙеҹәеҮҶйқўиҪ¬жҚўж–№жі•иҝӣиЎҢдәҶз ”з©¶пјҢ并еҸ–еҫ—дәҶеңЁ100kmиҢғеӣҙеҶ…зҡ„еҹәзәҝи·қзҰ»дёҠпјҢжҪ®дҪҚзІҫеәҰдјҳдәҺ10cmзҡ„жҲҗжһңпјӣзҺӢжңқйҳізӯүз ”з©¶дәҶеҹәдәҺPPKе’ҢзІҫеҜҶеҚ•зӮ№е®ҡдҪҚжҠҖжңҜпјҲPPPпјүзҡ„иҝңи·қзҰ»GNSSжҪ®дҪҚжөӢйҮҸеҪұе“Қеӣ зҙ пјҢз ”з©¶з»“жһңиЎЁжҳҺпјҢжүјжөҒеңҲеӨ©зәҝеҸҜжҸҗй«ҳи§ӮжөӢиҙЁйҮҸпјҢдё”PPPжЁЎејҸдёӢжҪ®дҪҚжөӢйҮҸзІҫеәҰдјҳдәҺ10cmпјӣжқңй”җеңЁиҝңжө·еҢәеҹҹд»ҘGPS PPKжҠҖжңҜиҝӣиЎҢдәҶж°ҙйқўй«ҳзЁӢдј йҖ’зҡ„жөӢиҜ•е·ҘдҪңпјҢз»“жһңиЎЁжҳҺпјҢиҜҘжҠҖжңҜе®ҡдҪҚзІҫеәҰеҸҜж»Ўи¶іе·ҘзЁӢйңҖжұӮпјӣзҺӢй•ҝж°ёзӯүе°ҶGPS PPKжҠҖжңҜеә”з”ЁдәҺй•ҝжұҹеҸЈзҡ„ж°ҙж·ұжөӢйҮҸе·ҘдҪңдёӯпјҢиҺ·еҫ—дәҶжҜ”дј з»ҹйӘҢжҪ®ж–№жі•жӣҙй«ҳзҡ„дҪңдёҡж•ҲзҺҮе’ҢзІҫеәҰпјӣеҸ¶дјҹзӯүеңЁж°ҙеә“ж°ҙдёӢең°еҪўжөӢйҮҸдёӯеҜ№PPKжҠҖжңҜиҝӣиЎҢдәҶеә”з”ЁпјҢиҫғеҘҪең°и§ЈеҶідәҶеұұеҢәйҖҡи®ҜдҝЎеҸ·йҒ®жҢЎдёҺжҺ§еҲ¶зӮ№и·қзҰ»иҫғиҝңеҜјиҮҙRTKдҪңдёҡж— жі•иҝӣиЎҢзҡ„й—®йўҳпјӣеҲҳиғңйңҮзӯүеңЁе‘јдјҰж№–дёӯиҝӣиЎҢдәҶPPKжҠҖжңҜзҡ„е®һйҷ…еә”з”ЁпјҢз»“жһңиЎЁжҳҺпјҢиҜҘжҠҖжңҜеңЁеҜ№еӨ§йқўз§Ҝж°ҙеҹҹиҝӣиЎҢж°ҙдёӢең°еҪўжөӢйҮҸж—¶пјҢе®ҡдҪҚзІҫеәҰеҸҜиҫҫеҺҳзұізә§гҖӮ
5 Q5 ^" {. [: m5 r6 s8 q9 z: {9 M" K
MarceloSantosзӯүз ”з©¶дәҶжө·жҙӢзҺҜеўғдёӯPPKз®—жі•зҡ„и§Јз®—зӯ–з•ҘпјҢжҸҗеҮәдәҶдёҖз§Қж–°зҡ„еӨ©ж°”延иҝҹжЁЎеһӢ并改иҝӣдәҶи§Јз®—зІҫеәҰгҖӮJaeYoungRohзӯүдҪҝз”ЁPPKжҠҖжңҜеӨ„зҗҶGNSSжө®ж Үи§ӮжөӢж•°жҚ®пјҢз»“жһңиЎЁжҳҺпјҢжө®ж Үи§ӮжөӢж°ҙдҪҚдёҺйӘҢжҪ®з«ҷи§ӮжөӢж°ҙдҪҚд№Ӣе·®е°ҸдәҺВұ2cmгҖӮ
: T4 n( J5 C( F! M# P$ A
зӣ®еүҚпјҢеӣҪеҶ…зӣёе…із ”究主иҰҒеҹәдәҺGPSиҝӣиЎҢпјҢзјәе°‘еҜ№дёҚеҗҢGNSSзі»з»ҹеҸҠе…¶з»„еҗҲи§Јз®—зӯ–з•Ҙзҡ„зІҫеәҰиҜ„дј°гҖӮжӯӨеӨ–пјҢй’ҲеҜ№е…Ҙжө·еҸЈзӯүжө·жҙӢзҺҜеўғзҡ„PPKи§Јз®—зІҫеәҰе’ҢзЁіе®ҡжҖ§зҡ„йӘҢиҜҒе·ҘдҪңд№ҹиҫғе°‘пјҢеҗҢж—¶еӣҪеҶ…PPKжҠҖжңҜзҡ„з ”з©¶еә”з”ЁйўҶеҹҹдё»иҰҒйӣҶдёӯдәҺеҶ…йҷҶж°ҙеҹҹпјҢеңЁиҝ‘жө·еІёзү№еҲ«жҳҜжқӯе·һж№ҫзӯүејәжҪ®жІіеҸЈзҡ„еә”з”Ёз ”з©¶иҫғдёәе°‘и§ҒгҖӮдёәжӯӨпјҢжң¬ж–ҮйҰ–е…ҲйҮҮз”ЁдёҚеҗҢзҡ„GNSSPPKи§Јз®—зӯ–з•ҘпјҢеҜ№йқҷжҖҒжҜ”жөӢиҝӣиЎҢзІҫеәҰе’ҢзЁіе®ҡжҖ§йӘҢиҜҒе·ҘдҪңпјҢ然еҗҺдҪҝз”ЁеӨҡGNSSиҒ”еҗҲи§Јз®—ж–№жі•иҝӣиЎҢдәҶеҠЁжҖҒжҜ”жөӢгҖӮжҜ”жөӢз»“жһңиЎЁжҳҺпјҢеҹәдәҺдёҚеҗҢGNSSзі»з»ҹеҸҠе…¶з»„еҗҲзҡ„PPKжҠҖжңҜзҡ„е®ҡдҪҚзІҫеәҰиғҪж»Ўи¶іе®һйҷ…е·ҘдҪңйңҖиҰҒгҖӮжңҖеҗҺпјҢеңЁжқӯе·һж№ҫж¶ҢжҪ®жІіеҸЈзҡ„еӨ§жЎҘиҲӘйҒ“зӣ‘жөӢе·ҘдҪңдёӯиҝӣиЎҢдәҶжҺЁе№ҝеә”з”ЁпјҢе®һдҫӢз»“жһңиЎЁжҳҺпјҢиҜҘжҠҖжңҜеҸҜдёәж°ҙдёӢең°еҪўжөӢйҮҸжҸҗдҫӣжҠҖжңҜж”Ҝж’‘гҖӮ
6 V8 ]( |% l, j; n n5 y* p дёҖгҖҒPPKж— йӘҢжҪ®жҠҖжңҜеҺҹзҗҶ
% _( ^% G) Q& I5 Q PPKж— йӘҢжҪ®жҠҖжңҜдё»иҰҒз”ұдёӨйғЁеҲҶз»„жҲҗпјҢ第дёҖйғЁеҲҶжҳҜйҮҮз”ЁиҪҪжіўзӣёдҪҚжҠҖжңҜиҺ·еҸ–й«ҳзІҫеәҰзҡ„дёүз»ҙеқҗж ҮжҲҗжһңпјҢ第дәҢйғЁеҲҶжҳҜйҮҮз”Ёзӣёе…ізҡ„й«ҳзЁӢиҪ¬жҚўжҠҖжңҜе®һзҺ°жҪ®дҪҚжҺ§еҲ¶гҖӮ
( Z' H8 o$ h5 I: J7 a7 w
иҪҪжіўзӣёдҪҚе·®еҲҶеҺҹзҗҶ
& j/ c) f% w) X) F" T
иҪҪжіўзӣёдҪҚе·®еҲҶжҠҖжңҜзҡ„еҺҹзҗҶжҳҜеҲ©з”ЁGNSSи§ӮжөӢиҜҜе·®еңЁж—¶й—ҙе’Ңз©әй—ҙдёҠзҡ„ејәзӣёе…ізү№жҖ§пјҢйҖҡиҝҮеҜ№еҹәеҮҶз«ҷе’ҢжөҒеҠЁз«ҷзҡ„еҺҹе§ӢиҪҪжіўзӣёдҪҚи§ӮжөӢж•°жҚ®иҝӣиЎҢеҸҢе·®и®Ўз®—пјҢж¶ҲйҷӨжҺҘ收жңәе’ҢеҚ«жҳҹж—¶й’ҹзҡ„еҒҸе·®гҖҒеҚ«жҳҹиҜҜе·®д»ҘеҸҠеӨ§йғЁеҲҶзҡ„з”өзҰ»еұӮгҖҒеҜ№жөҒеұӮ延иҝҹзҡ„еҪұе“ҚпјҢиҫҫеҲ°еҺҳзұізә§зҡ„е®ҡдҪҚзІҫеәҰгҖӮ
" \- K4 g8 r! y з ”з©¶иҖ…еҸҜд»Ҙд»ҺиҮіе°‘дёӨдёӘзӣёйҡ”жҹҗдёҖеӣәе®ҡи·қзҰ»пјҲз§°дёәеҹәзәҝпјүзҡ„GNSSжҺҘ收жңәдёӯиҺ·еҫ—зӣёдјјзҡ„жөӢйҮҸеҖјз»„еҗҲпјҢе°Ҷд»ҺдёӨдёӘжҺҘ收жңәеҫ—еҲ°зҡ„зӣёдјјзҡ„жөӢйҮҸеҖјеҪўжҲҗзәҝжҖ§з»„еҗҲпјҲе·®еҲҶпјүпјҢе°ұжңүеҸҜиғҪж¶ҲйҷӨдёӨдёӘжҺҘ收жңәе…ұжңүзҡ„иҜҜе·®пјҢиҝҷж ·зҡ„дёҖдёӘз»„еҗҲз§°дёәеҚ•е·®гҖӮеҜ№жқҘиҮӘеҗҢдёҖйў—еҚ«жҳҹзҡ„дёӨдёӘеҚ•е·®жөӢйҮҸеҖјиҝӣиЎҢжұӮе·®пјҢе°ұеҸҜд»Ҙеҫ—еҲ°еҸҢе·®гҖӮеҲ©з”ЁеҸҢе·®жҠҖжңҜеӨ„зҗҶиҪҪжіўзӣёдҪҚи§ӮжөӢеҖјпјҢе°ұеҸҜд»Ҙж¶ҲйҷӨеӨ§йғЁеҲҶзҡ„иҜҜе·®жәҗгҖӮйҖҡиҝҮеҚ•е·®ж¶ҲеҺ»дәҶеҚ«жҳҹжҳҹеҺҶиҜҜе·®гҖҒеҸ‘е°„дҝЎеҸ·зҡ„зӣёдҪҚе’Ңж—¶й’ҹеҒҸе·®пјҢеҰӮжһңжҺҘ收жңәеҗҢзә¬еәҰдё”зӣёи·қиҫғиҝ‘пјҲеҹәзәҝе°ҸдәҺ50kmпјүпјҢз”өзҰ»еұӮе’ҢеҜ№жөҒеұӮзҡ„еӨ§йғЁеҲҶиҜҜе·®д№ҹж¶ҲйҷӨдәҶгҖӮеҪўжҲҗеҸҢе·®еҗҺпјҢжҺҘ收жңәж—¶й’ҹеҒҸе·®иў«ж¶ҲеҺ»дәҶпјҢд»…еү©дёӢзӣёдҪҚйЎ№гҖҒж•ҙж•°йЎ№е’Ңзі»з»ҹзӣёдҪҚеҷӘеЈ°йЎ№гҖӮ
3 z1 e8 `: @/ @" ^ PPKж— йӘҢжҪ®жөӢйҮҸеҺҹзҗҶ
- } C. h1 W* [ \# A0 \6 q PPKжҠҖжңҜеҸҜйҖҡиҝҮеҗҺеӨ„зҗҶеҫ—еҲ°еҺҳзұізә§зҡ„жөӢзӮ№дёүз»ҙеқҗж ҮпјҢй«ҳзЁӢж•°жҚ®дёҖиҲ¬жҳҜCGCS2000зҡ„еӨ§ең°й«ҳж•°жҚ®пјҢеӨ„зҗҶж—¶йңҖиҰҒе°ҶеӨ§ең°й«ҳиҪ¬жҚўиҮізӣ®ж ҮеҹәеҮҶзҡ„й«ҳзЁӢж•°жҚ®пјҢеҰӮ85й«ҳзЁӢеҹәеҮҶпјҢе…¶еҺҹзҗҶеҰӮеӣҫ1жүҖзӨәгҖӮ
1 `0 Q7 J/ W: T* B# j! x 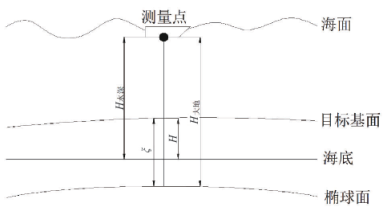 2 S7 e2 [6 U) |$ R% G) H I
2 S7 e2 [6 U) |$ R% G) H I
% w3 l& ?# B* e& @$ ]
еӣҫ1 PPKж— йӘҢжҪ®жөӢйҮҸеҺҹзҗҶ
/ {$ `5 O# y& p0 x ж°ҙеә•зӣёеҜ№дәҺзӣ®ж Үеҹәйқўзҡ„й«ҳзЁӢеҸҜиЎЁзӨәдёәпјҡ
- G" q3 x7 j: Y7 Y" j HпјқHж°ҙж·ұпјҚHеӨ§ең°пјӢОҫ
* V& |+ L7 f% M% x, E# Z4 V
ејҸдёӯпјҡHдёәжө·еә•еҲ°зӣ®ж Үеҹәйқўи·қзҰ»пјӣHж°ҙж·ұдёәз»ҸиҝҮеӨ©зәҝй«ҳж”№жӯЈе’Ңеҗғж°ҙж”№жӯЈд№ӢеҗҺзҡ„ж°ҙж·ұжөӢйҮҸеҖјпјӣHеӨ§ең°дёәиҜҘзӮ№еҲ°еӨ§ең°ж°ҙеҮҶйқўзҡ„и·қзҰ»пјӣОҫдёәй«ҳзЁӢејӮеёёеҖјгҖӮ
+ I* r7 W5 Y1 p3 [9 }
й—®йўҳзҡ„е…ій”®еңЁдәҺиҺ·еҸ–еҮҶзЎ®зҡ„й«ҳзЁӢејӮеёёж•°жҚ®гҖӮеңЁе°ҸиҢғеӣҙзҡ„жөӢйҮҸдёӯеҸҜйҮҮз”ЁдёғеҸӮж•°жқҘиҝӣиЎҢй«ҳзЁӢиҪ¬жҚўпјҢеӨ§иҢғеӣҙеҲҷеҸҜд»ҘдҪҝз”ЁеҢәеҹҹдјјеӨ§ең°ж°ҙеҮҶйқўзІҫеҢ–иҝӣиЎҢгҖӮ
. [/ W W }. L5 O: g$ j дәҢгҖҒзІҫеәҰеҲҶжһҗдёҺйӘҢиҜҒ
& \9 P* p* U2 z3 M. N4 ?5 B
дёәдәҶйӘҢиҜҒPPKеңЁж°ҙдёҠдҪңдёҡзҡ„зЁіе®ҡжҖ§е’ҢеҸҜйқ жҖ§пјҢжңүеҝ…иҰҒеҜ№PPKи§Јз®—з»“жһңзҡ„зІҫеәҰгҖҒеҸҜйқ жҖ§е’ҢзЁіе®ҡжҖ§иҝӣиЎҢеҲҶжһҗгҖӮдҪҶж°ҙдёҠдҪңдёҡж—¶жөӢзӮ№жҳҜеңЁдёҚж–ӯиҝҗеҠЁзҡ„иҝҮзЁӢдёӯиҺ·еҸ–зҡ„пјҢж— жі•еғҸйҷҶең°дҪңдёҡж—¶й•ҝж—¶й—ҙеӨҡж¬ЎйҮҚеӨҚжөӢйҮҸеҫ—еҲ°еӨҡз»„ж•°жҚ®иҝӣиЎҢе№іе·®пјҢеӣ жӯӨйҰ–е…ҲеңЁйҷҶең°дёҠйҖүеҸ–е·ІзҹҘй«ҳзӯүзә§жҺ§еҲ¶зӮ№пјҢжҢүз…§ж°ҙдёҠдҪңдёҡзҡ„ж•°жҚ®йҮҮйӣҶи®ҫзҪ®иҝӣиЎҢйқҷжҖҒжҜ”жөӢпјҢеҜ№PPKи§Јз®—з»“жһңзҡ„зІҫеәҰгҖҒеҸҜйқ жҖ§е’ҢзЁіе®ҡжҖ§иҝӣиЎҢиҜ„дј°пјҢ然еҗҺйҮҮз”ЁеҗҢдёҖGNSSеӨ©зәҝпјҢз”ұдёӨеҸ°еҗҢеһӢеҸ·GNSSжҺҘ收жңәеңЁиҲ№иҲ¶дёҠеҲҶеҲ«иҝӣиЎҢRTKе’ҢPPKи§ӮжөӢпјҢеҒҮе®ҡRTKз»“жһңдёәзңҹеҖјпјҢж №жҚ®ж—¶й—ҙжҲіеҢ№й…Қзҡ„ж–№ејҸжҜ”иҫғRTKдёҺPPKи§Јз®—з»“жһңзҡ„еҒҸе·®гҖӮ
+ V, O7 f, f& K5 h3 w) W2 { жң¬ж–ҮйҮҮз”Ёзҡ„еҚ«жҳҹе®ҡдҪҚзі»з»ҹеҢ…жӢ¬е…Ёзҗғе®ҡдҪҚзі»з»ҹгҖҒж јжҙӣзәіж–ҜпјҲGLONASSпјүгҖҒеҢ—ж–—еҚ«жҳҹеҜјиҲӘзі»з»ҹпјҲBDSпјүгҖҒдјҪеҲ©з•ҘеҚ«жҳҹеҜјиҲӘзі»з»ҹпјҲGalileoпјүе’ҢеҮҶеӨ©йЎ¶еҚ«жҳҹзі»з»ҹпјҲQZSSпјүгҖӮ
4 C4 v& b' T# o9 V! z2 h% ^# \
йқҷжҖҒжҜ”жөӢ
4 d; F4 g8 n8 N
йӘҢиҜҒж—¶йҖүеҸ–дәҶ5дёӘжҺ§еҲ¶зӮ№еҗҢж—¶иҝӣиЎҢи§ӮжөӢпјҢйҖүеҸ–е…¶дёӯдёҖдёӘжҺ§еҲ¶зӮ№жһ¶и®ҫGNSSжөҒеҠЁз«ҷпјҢе…¶д»–4дёӘжҺ§еҲ¶зӮ№дҪңдёәеҹәеҮҶз«ҷпјҢдёҺе…¶и·қзҰ»зәҰдёә5kmгҖҒ10kmгҖҒ15kmе’Ң20kmгҖӮж №жҚ®еёёи§„дҪңдёҡй…ҚзҪ®пјҢдёҖиҲ¬еңЁеҹәеҮҶз«ҷе’Ңиҝңи·қзҰ»з§»еҠЁдҪңдёҡж—¶йҖүз”ЁеӨ§ең°еһӢGNSSжҺҘ收жңәпјҢе…¶д»–еҲҷдҪҝз”Ёжҷ®йҖҡGNSSжҺҘ收жңәгҖӮеӣ жӯӨпјҢеңЁжөҒеҠЁз«ҷе’Ңи·қзҰ»жөҒеҠЁз«ҷ20kmзҡ„дёӨдёӘи§ӮжөӢзӮ№дҪҚйҮҮз”ЁTrimbleR9SеӨ§ең°еһӢGNSSжҺҘ收жңәпјҢ并йҮҮз”ЁZephyr Model2GeodeticеһӢеҚ«жҳҹеӨ©зәҝиҝӣиЎҢи§ӮжөӢпјҢе…¶д»–зӮ№дҪҚйҮҮз”ЁTrimbleR8SеһӢжҺҘ收жңәиҝӣиЎҢйқҷжҖҒжҜ”жөӢгҖӮжүҖжңүзҡ„GNSSжҺҘ收жңәз»ҹдёҖи§ӮжөӢи®ҫзҪ®пјҢи®°еҪ•жүҖжңүеҸҜи§ҒеҚ«жҳҹпјҲGPSгҖҒGLONASSгҖҒBDSгҖҒGalileoе’ҢQZSSпјүзҡ„еӨҡйў‘ж•°жҚ®пјҲеҰӮGPSи®°еҪ•L1гҖҒL2е’ҢL5пјүпјҢеҚ«жҳҹжҲӘжӯўй«ҳеәҰи§’и®ҫзҪ®дёә15В°пјҢжҜҸз§’и®°еҪ•дёҖдёӘи§ӮжөӢж•°жҚ®гҖӮ
^8 _/ } v5 L. l9 y/ j е®ҢжҲҗи§ӮжөӢеҗҺпјҢд»ҘTrimbleзҡ„T02ж јејҸдёӢиҪҪжүҖжңүGNSSжҺҘ收жңәзҡ„еҺҹе§Ӣи§ӮжөӢж•°жҚ®е№¶еҜје…ҘTrimble BusinessCenterпјҲTBCпјүиҪҜ件иҝӣиЎҢеҗҺеӨ„зҗҶпјҢеҗҺеӨ„зҗҶж—¶и®ҫзҪ®еҚ«жҳҹжҲӘжӯўй«ҳеәҰи§’дёә15В°пјҢйҮҮз”ЁеӨҡйў‘ж•°жҚ®еӨ„зҗҶдёҚеҗҢзҡ„еҚ«жҳҹдҝЎеҸ·пјҢ并еҲҶеҲ«йҖүз”ЁеҚ•жҳҹгҖҒеҸҢжҳҹе’ҢеӨҡжҳҹз»„еҗҲиҝӣиЎҢпјҢPPKи§Јз®—з»“жһңдёҺжҺ§еҲ¶зӮ№иҫғе·®з»ҹи®Ўз»“жһңи§ҒиЎЁ1иҮіиЎЁ7гҖӮз”ұдәҺеҗ„жөӢз«ҷејҖе§Ӣе’Ңз»“жқҹзҡ„ж—¶й—ҙз•Ҙжңүе·®ејӮпјҢеӣ жӯӨйҖүеҸ–еҗҢжӯҘи§ӮжөӢж•°жҚ®иҝӣиЎҢз»ҹи®ЎеҲҶжһҗпјҢжүҖжңүзҡ„и§Јз®—жЁЎејҸйғҪеҫ—еҲ°дәҶ3900дёӘжңүж•Ҳи§ЈгҖӮ
6 p5 M# K$ [5 D* M 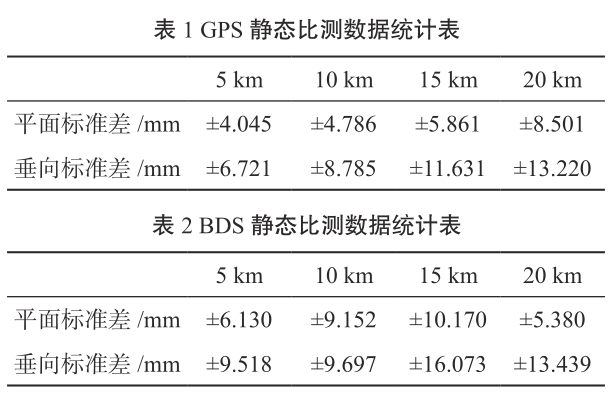 5 d6 t1 y1 V0 }2 H
5 d6 t1 y1 V0 }2 H
: ?/ w/ J7 U/ O" @+ R
 7 I- K" \% k" i( G
7 I- K" \% k" i( G
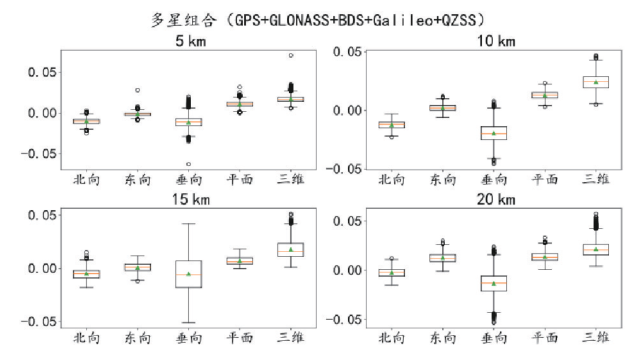
/ C7 L6 z0 J9 ~ з”ұиЎЁ1иҮіиЎЁ7еҸҜи§ҒпјҢеңЁд»…дҪҝз”ЁдёҖдёӘGNSSжҳҹеә§зҡ„жғ…еҶөдёӢпјҢGPSи§ЈеңЁеӨ§йғЁеҲҶжқЎд»¶дёӢз•ҘдјҳдәҺBDSеҚ«жҳҹзҡ„и§Јз®—з»“жһңпјҢдҪҶдёӨиҖ…еӨ„дәҺеҗҢдёҖйҮҸзә§пјҢжүҖжңүзҡ„е№ійқўж ҮеҮҶе·®йғҪеӨ„дәҺжҜ«зұізҡ„йҮҸзә§пјҢеһӮеҗ‘зҡ„ж ҮеҮҶе·®еӨ„дәҺеҺҳзұійҮҸзә§пјӣжҜ”иҫғзү№ж®Ҡзҡ„жҳҜBDSи§Јз®—з»“жһңеңЁ20kmеӨ„е№ійқўж ҮеҮҶе·®жңҖе°ҸпјҢдё”еһӮеҗ‘ж ҮеҮҶе·®дјҳдәҺ15kmи§Јз®—з»“жһңпјҢе…¶дё»иҰҒеҺҹеӣ жҳҜи§ӮжөӢи®ҫеӨҮдёҚеҗҢйҖ жҲҗзҡ„пјҢеңЁ20kmеӨ„дҪҝз”Ёзҡ„еӨ§ең°еһӢеӨ©зәҝй…ҚеҗҲеӨ§ең°еһӢGNSSжҺҘ收жңәпјҢе…¶жҖ§иғҪдјҳдәҺе…¶д»–жөӢзӮ№гҖӮдҪҝз”ЁеӨҡдёӘGNSSжҳҹеә§зҡ„и§Јз®—з»“жһңжҳҺжҳҫдјҳдәҺд»…дҪҝз”Ё1дёӘGNSSжҳҹеә§зҡ„и§ЈпјҢдҪҶ2дёӘгҖҒ3дёӘгҖҒ4дёӘеҸҠ5дёӘзҡ„GNSSжҳҹеә§з»„еҗҲзҡ„з»“жһңжІЎжңүжҳҫи‘—зҡ„е·®ејӮпјҢе№ійқўж ҮеҮҶе·®йғҪе°ҸдәҺ1cmпјҢеһӮеҗ‘ж ҮеҮҶе·®еҹәжң¬йғҪе°ҸдәҺ1cmгҖӮеӣ жӯӨе»әи®®еңЁPPKдҪңдёҡж—¶пјҢеҗҢж—¶и§ӮжөӢжүҖжңүзҡ„GNSSжҳҹеә§пјҢ并е°ҪйҮҸдҪҝз”ЁеӨ§ең°еһӢGNSSжҺҘ收жңәиҝӣиЎҢи§ӮжөӢгҖӮ
! Q* y# S7 C+ s* V6 {
 ( P- N' j- |1 u7 c9 h
( P- N' j- |1 u7 c9 h
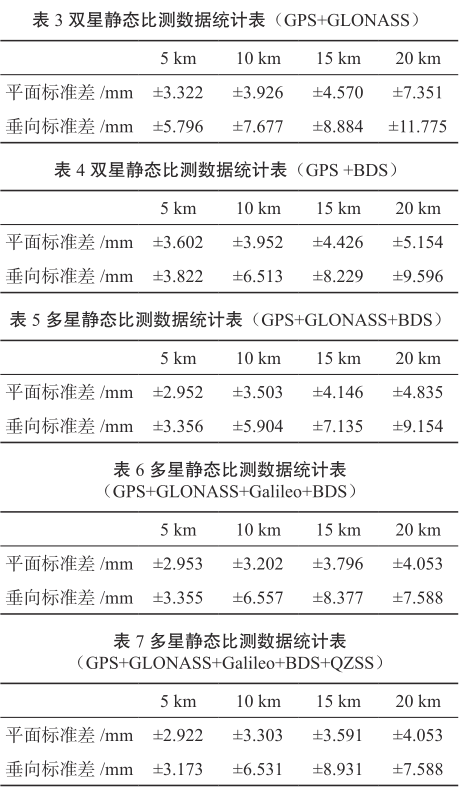
4 L- f/ y: Y* T Q8 k еӣҫ2 дёҚеҗҢи·қзҰ»дёӢеӨҡжҳҹз»„еҗҲеҗ„ж–№еҗ‘иҫғе·®пјҲеҚ•дҪҚпјҡmпјү
9 R4 J' g5 L3 D2 @6 g
еңЁдёҚеҗҢи·қзҰ»и§ӮжөӢ5дёӘжҳҹеә§еҫ—еҲ°зҡ„PPKи§ЈдёҺжҺ§еҲ¶зӮ№иҫғе·®з»“жһңеҰӮеӣҫ2жүҖзӨәгҖӮд»Һз®ұеһӢеӣҫдёӯеҸҜд»ҘзңӢеҮәпјҢдёҚеҗҢи·қзҰ»зҡ„еҢ—еҗ‘гҖҒдёңеҗ‘е’ҢеһӮеҗ‘иҫғе·®йғҪеңЁВұ5cmд№ӢеҶ…пјҢж•°жҚ®еҲҶеёғиҫғдёәйӣҶдёӯпјҢжңӘеҮәзҺ°еҒҸе·®и¶…иҝҮ5cmзҡ„зӮ№гҖӮеҗҢж—¶пјҢи®Ўз®—еҫ—еҲ°зҡ„е№ійқўе’Ңдёүз»ҙдҪҚзҪ®иҫғе·®еҹәжң¬йғҪе°ҸдәҺ5cmгҖӮеҸҜи§ҒеңЁ1Hzи§ӮжөӢжқЎд»¶дёӢPPKи§Јз®—з»“жһңиҫғдёәзЁіе®ҡпјҢе…·еӨҮеә”з”ЁдәҺж°ҙдёҠ移еҠЁдҪңдёҡзҡ„иғҪеҠӣгҖӮ
& T/ b# h% X4 Q) y
еҠЁжҖҒжҜ”жөӢ
i& M/ B1 H% p- V! O йҮҮз”ЁиҲ№иҪҪ移еҠЁжөӢйҮҸзҡ„ж–№ејҸеҜ№з§»еҠЁжөӢйҮҸзҡ„зІҫеәҰиҝӣиЎҢеҠЁжҖҒжҜ”жөӢгҖӮеңЁе·ІзҹҘжҺ§еҲ¶зӮ№дёҠжһ¶и®ҫGNSSеҹәеҮҶз«ҷпјҢ并еңЁиҲ№иҲ¶дёҠжһ¶и®ҫGNSSжөҒеҠЁз«ҷпјҢеңЁжқӯе·һж№ҫжІіеҸЈеҢәеҹҹиҝӣиЎҢжөӢиҜ•гҖӮжүҖжңүжөӢз«ҷйғҪйҮҮз”ЁTrimble R9SеӨ§ең°еһӢжҺҘ收жңәе’ҢZephyr Model2 GeodeticеһӢеҚ«жҳҹеӨ©зәҝиҝӣиЎҢи§ӮжөӢпјҡд»Ҙ10В°зҡ„еҚ«жҳҹжҲӘжӯўй«ҳеәҰи§’йҮҮйӣҶж•°жҚ®пјҢи§ӮжөӢ5дёӘеҚ«жҳҹжҳҹеә§е№¶жҢү1Hzйў‘зҺҮи®°еҪ•еҺҹе§Ӣж•°жҚ®пјҢеҗҢж—¶йҮҮз”ЁеҹәдәҺжөҷжұҹзңҒиҝһз»ӯиҝҗиЎҢеҚ«жҳҹе®ҡдҪҚз»јеҗҲжңҚеҠЎзі»з»ҹпјҲZJCORSпјүзҡ„зҪ‘з»ңRTKпјҲдҪҝз”ЁGPSдёҺGLONASSзҡ„еҸҢжҳҹз»„еҗҲпјүиҝӣиЎҢдёүз»ҙе®ҡдҪҚпјҢдҪҝз”ЁжүӢз°ҝи®°еҪ•RTKе®ҡдҪҚз»“жһңгҖӮйҮҺеӨ–ж•°жҚ®йҮҮйӣҶз»“жқҹеҗҺпјҢеҲҶеҲ«дёӢиҪҪGNSSеҹәеҮҶз«ҷе’ҢжөҒеҠЁз«ҷзҡ„T02еҺҹе§Ӣи§ӮжөӢж•°жҚ®пјҢйҮҮз”ЁTBCиҪҜ件иҝӣиЎҢеҗҺеӨ„зҗҶгҖӮ
2 T3 R+ _4 w8 `" H; a1 J- | д»ҘRTKе®ҡдҪҚз»“жһңдёәеҹәеҮҶпјҢе°ҶPPKеӨ„зҗҶз»“жһңйҖҡиҝҮж—¶й—ҙжҲіеҢ№й…ҚеҗҺдёҺRTKе®ҡдҪҚз»“жһңжұӮе·®пјҢе…¶з»“жһңеҰӮиЎЁ8жүҖзӨәгҖӮд»ҺиЎЁдёӯеҸҜи§ҒпјҢеҗ„дёӘз»ҹи®ЎйҮҸзҡ„дёӯдҪҚж•°дёҺе№іеқҮеҖјеҹәжң¬дёҖиҮҙпјҢж•°жҚ®еҒҸе·®иҫғе°ҸгҖӮе№ійқўдёҺдёүз»ҙе®ҡдҪҚз»“жһңзҡ„ж ҮеҮҶе·®йғҪеӨ„дәҺеҺҳзұійҮҸзә§пјҢеҗҢж—¶пјҢеҗ„дёӘе®ҡдҪҚеҲҶйҮҸиҫғе·®зҡ„е№іеқҮеҖјйғҪеӨ„дәҺеҺҳзұізҡ„йҮҸзә§пјҢеҸҜи§ҒRTKдёҺPPKе®ҡдҪҚз»“жһңзҡ„дёҖиҮҙжҖ§иҫғеҘҪгҖӮ
. r5 o9 `2 S/ D* U8 z, X иЎЁ8дёӯзҡ„еһӮеҗ‘е’Ңдёүз»ҙе®ҡдҪҚз»“жһңиҫғе·®жңҖеӨ§еҖјеҲҶеҲ«дёә16.00cmе’Ң17.27cmпјҢиЎЁжҳҺд»ҚеӯҳеңЁйғЁеҲҶж•°жҚ®иҫғе·®еӨ§дәҺ10cmгҖӮеҜ№ж•°жҚ®иҝӣиЎҢеҲҶжһҗпјҢиҫғе·®и¶…иҝҮ10cmзҡ„зӮ№дё»иҰҒдҪҚдәҺжөӢеҢәеҶ…жЎҘжўҒйҷ„иҝ‘пјҢд»…дҪҝз”ЁGPSдёҺGLONASSеҸҢжҳҹз»„еҗҲеҹәдәҺZJCORSзҡ„зҪ‘з»ңRTKжҠҖжңҜеҸ—жЎҘйқўйҒ®жҢЎпјҢи§ӮжөӢеҚ«жҳҹж•°иҫғе°‘еҜјиҮҙе®ҡдҪҚз»“жһңдёҚдҪігҖӮ
7 a( i. V; a' Y2 e# V дёүгҖҒе®һдҫӢеә”з”Ё
+ i4 j+ ^8 s9 K: m жөӢеҢәдҪҚдәҺжқӯе·һж№ҫеҸЈжҫүжөҰж®өйҷ„иҝ‘пјҢиҜҘиҲӘйҒ“жІіеҠҝеҸҳеҢ–еҸ—дёҠжёёеҫ„жөҒе’ҢдёӢжёёжҪ®жөҒзҡ„еҸҢйҮҚеҪұе“ҚгҖӮз”ұдәҺжІіеәҠе®Ҫжө…гҖҒжҪ®ејәжөҒжҖҘпјҢж¶ЁиҗҪжҪ®жөҒи·ҜеӯҳеңЁиҫғеӨ§е·®ејӮгҖӮе®һжөӢжңҖеӨ§ж¶ҢжҪ®жөҒйҖҹзәҰдёә12m/sпјҢжҪ®дҪҚзһ¬й—ҙжңҖеӨ§ж¶Ёе№…2mд»ҘдёҠпјҢе®һжөӢжңҖеӨ§ж¶ҢжҪ®еҺӢеҠӣ70kPaгҖӮиҷҪ然иҲӘйҒ“жүҖеӨ„жұҹйҒ“ж°ҙеҹҹжңҖзӘ„д»…жңүзәҰ8kmе·ҰеҸіпјҢдҪҶз”ұдәҺеӨ„дәҺж¶ҢжҪ®еҢәеҹҹдё”дёӨеІёдё»иҰҒдёәжө…ж»©пјҢеҹәжң¬ж— жі•еёғи®ҫйӘҢжҪ®з«ҷпјӣжүҖеӨ„дҪҚзҪ®зҡ„ж— зәҝз”өдҝЎеҸ·дёҖзӣҙиҫғе·®пјҢйҮҮз”ЁRTKж–№ејҸдҪңдёҡж—¶ж•°жҚ®й“ҫжҺҘдёўеӨұдёҘйҮҚпјҢеӣ жӯӨйҮҮз”ЁPPKжҠҖжңҜз»“еҗҲеҚ•йў‘жөӢж·ұд»ӘиҝӣиЎҢж°ҙдёӢең°еҪўжөӢйҮҸе·ҘдҪңгҖӮ
/ J- [% y, h( @9 |. W
ж•°жҚ®йҮҮйӣҶе…ұиҺ·еҸ–7072дёӘе®ҡдҪҚж•°жҚ®пјҢе®һж—¶иҺ·еҸ–е®ҡдҪҚж•°жҚ®пјҲеҗ«еҚ•зӮ№и§ЈдёҺжө®еҠЁи§ЈпјүгҖҒPPKе®ҡдҪҚж•°жҚ®зҡ„е®ҡдҪҚиҫғе·®еҰӮиЎЁ9жүҖзӨәгҖӮд»ҺиЎЁдёӯеҸҜи§ҒпјҢйҮҺеӨ–жөӢйҮҸж—¶з”ұдәҺз»ҸеёёеҸ‘з”ҹRTKдҝЎеҸ·дёўеӨұзҡ„й—®йўҳпјҢеӣ жӯӨеҢ—еҗ‘гҖҒдёңеҗ‘е®һж—¶е®ҡдҪҚдёҺPPKе®ҡдҪҚзҡ„з»“жһңиҫғе·®зҡ„з»қеҜ№еҖјжңҖеӨ§иҫҫеҲ°дәҶ18.569mе’Ң33.430mпјҢеһӮеҗ‘зҡ„иҫғе·®з»қеҜ№еҖјжңҖеӨ§и¶…иҝҮдәҶ75.932mпјҢиҜҘж•°жҚ®е·Із»Ҹе®Ңе…Ёи¶…еҮәдәҶGNSSзі»з»ҹзҡ„еҚ•зӮ№е®ҡдҪҚзІҫеәҰпјҢдё»иҰҒз”ұдәҺеӨ§жЎҘйҷ„иҝ‘GNSSдҝЎеҸ·иў«йҒ®жҢЎеҸҠRTKж”№жӯЈдҝЎеҸ·дёўеӨұеҜјиҮҙгҖӮд»Һе№ійқўе’Ңдёүз»ҙзҡ„е®ҡдҪҚиҫғе·®зҡ„ж ҮеҮҶе·®жқҘзңӢпјҢйғҪе·Із»Ҹи¶…иҝҮдәҶзұізә§зҡ„йҮҸзә§пјҢеҸҜи§ҒдёўеӨұRTKе·®еҲҶдҝЎеҸ·еҜ№е®ҡдҪҚз»“жһңзҡ„еҪұе“ҚжҳҜе·ЁеӨ§зҡ„гҖӮ
( R. b6 Q2 O+ G8 ^, S5 Y8 x з”ұдәҺRTKе®һж—¶дҝЎеҸ·дёҺPPKдҝЎеҸ·зҡ„е®ҡдҪҚз»“жһңе·®и·қиҫғеӨ§пјҢеӣ жӯӨдҪҝз”ЁжөӢеҢәйҷ„иҝ‘е·Іжңүзҡ„й«ҳзЁӢејӮеёёжЁЎеһӢе°ҶRTKдёҺPPKиҺ·еҸ–зҡ„й«ҳзЁӢж•°жҚ®иҪ¬жҚўиҮі85еӣҪ家й«ҳзЁӢеҹәеҮҶеҗҺпјҢдёҺеҗҢжӯҘи§ӮжөӢзҡ„жҪ®дҪҚж•°жҚ®иҝӣиЎҢйӘҢиҜҒгҖӮеӣҫ3з»ҳеҲ¶дәҶдҪңдёҡжңҹй—ҙжҹҗеӨ©зҡ„RTKе®һж—¶жҪ®дҪҚгҖҒPPKжҪ®дҪҚгҖҒеҚ—еҢ—еІёе’ҢйҖҡиҲӘеӯ”зҡ„жҪ®дҪҚз«ҷзҡ„жҪ®дҪҚиҝҮзЁӢзәҝгҖӮд»Һеӣҫ3дёҠеҸҜи§ҒRTKе®һж—¶жҪ®дҪҚдёҺPPKи§Јз®—з»“жһңеҹәжң¬жҳҜдёҖиҮҙзҡ„пјҢиҖҢдёўеӨұRTKе·®еҲҶдҝЎеҸ·зҡ„е®һж—¶е®ҡдҪҚжҪ®дҪҚж•°жҚ®еҸ‘з”ҹдәҶиҫғеӨ§зҡ„жҢҜиҚЎпјҢе·Із»Ҹж— жі•ж»Ўи¶іRTKдёүз»ҙж°ҙж·ұжөӢйҮҸзҡ„жҠҖжңҜиҰҒжұӮгҖӮPPKжҪ®дҪҚдёҺиҜҘеҢәеҹҹеёғзҪ®зҡ„дёүдёӘжҪ®дҪҚз«ҷзҡ„ж•°жҚ®иғҪеӨҹиҫғеҘҪзҡ„еҗ»еҗҲпјҢе…¶и®Ўз®—з»“жһңеҸҜд»Ҙж»Ўи¶іеңЁиҜҘеҢәеҹҹдёӯиҝӣиЎҢRTKдёүз»ҙж°ҙж·ұжөӢйҮҸзҡ„зІҫеәҰиҰҒжұӮгҖӮ
( C! {; c- s& L/ j9 \6 M6 f2 Y" U 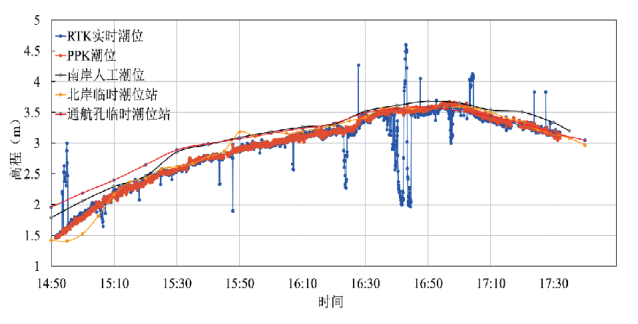 * n* S& f, f( D; n
* n* S& f, f( D; n
) ] ~/ N( \1 B' a* y; {
еӣҫ3 RTKе®һж—¶жҪ®дҪҚгҖҒPPKжҪ®дҪҚдёҺжҪ®дҪҚз«ҷжҪ®дҪҚж•°жҚ®жҜ”иҫғеӣҫ
' q2 c5 v( l1 ^, o
еӣӣгҖҒз»“и®ә
1 q/ E8 J4 Z0 P) j: L: d
жң¬ж–ҮеҹәдәҺиҪҪжіўзӣёдҪҚи§ӮжөӢеҺҹзҗҶд»Ӣз»ҚдәҶиҪҪжіўзӣёдҪҚе·®еҲҶжҠҖжңҜпјҢйҖҡиҝҮйқҷжҖҒе’ҢеҠЁжҖҒжҜ”жөӢзҡ„ж–№жі•иҝӣиЎҢдәҶзІҫеәҰе’ҢзЁіе®ҡжҖ§жөӢиҜ•еҗҺпјҢеңЁжқӯе·һж№ҫж¶ҢжҪ®жІіеҸЈиҝӣиЎҢдәҶе®һйҷ…еә”з”ЁпјҢдё»иҰҒз»“и®әеҰӮдёӢпјҡ
" o- |& F- h6 p8 z& `9 Y йқҷжҖҒжҜ”жөӢз»“жһңиЎЁжҳҺпјҢ20kmи·қзҰ»еҶ…зҺ°жңүGNSSзі»з»ҹзҡ„PPKи§Јз®—з»“жһңйғҪиғҪз¬ҰеҗҲзӣёе…іи§„иҢғиҰҒжұӮпјӣеҠЁжҖҒжҜ”жөӢз»“жһңиЎЁжҳҺпјҢRTKе’ҢPPKи§Јзҡ„дёҖиҮҙжҖ§иҫғеҘҪпјҢе№ійқўдёҺдёүз»ҙе®ҡдҪҚз»“жһңзҡ„ж ҮеҮҶе·®йғҪеӨ„дәҺеҺҳзұійҮҸзә§гҖӮйқҷжҖҒжҜ”жөӢз»“жһңиЎЁжҳҺпјҢеңЁ20kmи·қзҰ»еҶ…пјҢзҺ°жңүзҡ„GNSSзі»з»ҹйғҪиғҪжҸҗдҫӣж»Ўи¶ізӣёе…іи§„иҢғиҰҒжұӮзҡ„е®ҡдҪҚз»“жһңпјҢеӨҡдёӘGNSSзі»з»ҹзҡ„иҒ”еҗҲи§ӮжөӢи§ЈиғҪжҸҗдҫӣзІҫеәҰжӣҙдёәзЁіе®ҡзҡ„з»“жһңпјӣе®һйҷ…еә”з”ЁдёӯPPKи§Јз®—з»“жһңзІҫеәҰеҸҜж»Ўи¶іRTKдёүз»ҙж°ҙж·ұжөӢйҮҸзҡ„жҠҖжңҜиҰҒжұӮпјҢиғҪиҫғеҘҪең°и§ЈеҶіRTKе·®еҲҶдҝЎеҸ·дёўеӨұж—¶е®ҡдҪҚзІҫеәҰдёҘйҮҚдёӢйҷҚзҡ„й—®йўҳпјҢе…·жңүиҫғеӨ§зҡ„еә”з”ЁжҪңеҠӣпјӣеҗҺз»ӯжңүеҝ…иҰҒеңЁе»¶й•ҝжөӢиҜ•и·қзҰ»зҡ„еҹәзЎҖдёҠеҜ№жӣҙеӨҡеҪұе“ҚPPKи§Јз®—з»“жһңзҡ„еӣ зҙ иҝӣиЎҢз ”з©¶пјҢ并ејҖеұ•иҒ”еҗҲRTKе’ҢPPKзҡ„ж°ҙдёӢең°еҪўжөӢйҮҸжҠҖжңҜз ”з©¶гҖӮ
, f- w- b o+ g1 b3 G: M
гҖҗдҪңиҖ…з®Җд»ӢгҖ‘ж–Ү/йӯҸиҚЈзҒҸ йҷҲдҪіе…ө еҫҗиҫҫпјҢжқҘиҮӘжөҷжұҹзңҒж°ҙеҲ©жІіеҸЈз ”究йҷўпјҲжөҷжұҹзңҒжө·жҙӢ规еҲ’и®ҫи®Ўз ”з©¶йҷўпјүе’ҢжөҷжұҹзңҒжІіеҸЈжө·еІёйҮҚзӮ№е®һйӘҢе®Өпјӣ第дёҖдҪңиҖ…йӯҸиҚЈзҒҸпјҢ1982е№ҙеҮәз”ҹпјҢз”·пјҢзЎ•еЈ«пјҢй«ҳзә§е·ҘзЁӢеёҲпјҢдё»иҰҒд»ҺдәӢж°ҙйҷҶдёҖдҪ“зІҫз»ҶжҺўжөӢж–№йқўзҡ„еә”з”Ёз ”з©¶е·ҘдҪңпјӣжң¬ж–ҮдёәеҹәйҮ‘йЎ№зӣ®пјҢжөҷжұҹзңҒ科жҠҖи®ЎеҲ’иө„еҠ©йЎ№зӣ®пјҲ2016F10012пјҢ2017F10008пјүпјӣжөҷжұҹзңҒж°ҙеҲ©з§‘жҠҖи®ЎеҲ’йЎ№зӣ®(RC1605пјҢRC1805пјҢRC1902)пјӣж–Үз« жқҘиҮӘгҖҠжө·жҙӢжҠҖжңҜеӯҰжҠҘгҖӢпјҲ2021е№ҙ第1жңҹпјүпјҢеҸӮиҖғж–ҮзҢ®з•ҘпјҢз”ЁдәҺеӯҰд№ дёҺдәӨжөҒпјҢзүҲжқғеҪ’дҪңиҖ…еҸҠеҮәзүҲзӨҫе…ұеҗҢжӢҘжңүпјҢжҺҲжқғиҪ¬иҪҪдәҺе…¬дј—еҸ·пјҡжәӘжөҒд№Ӣжө·жҙӢдәәз”ҹ
7 |& U# e* F0 W* s& b {9 O - END -
8 D J' ~ ~. H ]4 f; L+ V
3 n8 \4 A1 |2 X. w) ?7 Z


