# ~, d9 Z$ I+ Q5 G
最近正好在学水道测量,画个图来整理下哈。
; G$ s9 T7 |9 }4 g6 U" D 信息量比较大,我尝试仔细讲解下。
- `3 Q: b( B: _8 a
图一我觉得湖的水量只是水道测量的一个副产品啦,当然也可以测海呀,测河呀。关键是要得到水底的三维坐标,然后插值生成DEM之类的模型,水量也只是个和地面上一个山坡土方量差不多的操作。
$ m0 f5 r+ |9 B8 ~6 j
那下面就结合图一讲讲水道测量,即如何获得水底点三维坐标。以下介绍我知道的一种方法:
. [) n( X) q1 y: C5 a* s: M8 H, \
/ T# G# s! [+ y3 [, G: R" _6 M+ t 首先,我们需要一艘船,这艘船需要搭载可以测水平坐标和测水深的装备,最好还有个测姿态的装备。
( d Z, {+ ]" R( U! s# g- F* |6 V8 O
: C5 R- z9 j* O' J: N4 ?; E 水平坐标XY对我们来说比较简单,和地面上一样,用GPS就行,精度要高的话用DGPS(伪距法差分)或RTK(载波相位法差分),这样基本能得到分米级精度了。
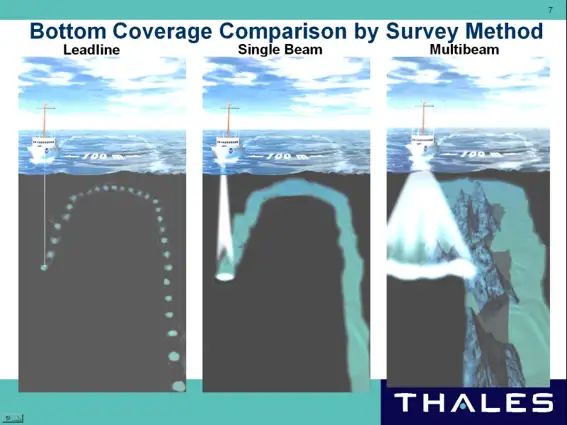
那水深怎么测呢,我们会想到用测距的传统办法电磁波,可惜电磁波在水中衰减太快了,于是选择采用声波了,依然是用速度*发射接受时延/2这种方法来测距。有两种常用装备可供使用,单波束和多波束测深仪,如图二所示。单波束覆盖面积小,比较便宜,多波束线阵推扫,覆盖面积大,覆盖区边界上精度不如单波束,比较贵。对于测深声纳,和GPS不同,时延不再是误差的重点[毕竟光速还是比声速高了好多数量级],而需要更多地关注声速。声速在水中随着温度,盐度,压强的变化而变化,有一些随深度变化的经验公式但也不准,所以一般会在实地标定一个平均声速。(水声学这块儿我也不懂,貌似哈工大很厉害)。[此外,也可以用机载激光之类的通过水面反射与水底反射时延来测深,不过精度较低且只能适用于几十米以内的浅水区,本文不作讨论]
& @7 h' C( ^ G3 Z3 F9 O 图二 copyright:http://www.fugro-pelagos.com/papers/newdevinmulitbeambackscatter/images/Bottom%20Coverage%20Comparison.jpg
1 O# i' | C6 n& O: O. t
不过由回声测深仪echosounder0 ~7 w* n q4 q, t
/ h2 f; S6 l. r3 G; P3 i
测得的并不是我们所想要的水深。如图一所示,我们还需做潮汐改正tide correction,声波发射接受器安放位置改正shift,声速改正sound velocity correction还有船的侧倾俯仰上下浮动改正roll,pitch,heave correction.
4 `4 W8 v1 y9 |$ ?
8 C6 N" ^. V, u, E8 Z1 \% L 下面主要介绍潮汐改正。潮汐
9 X* { G0 {4 l3 o# h
! @% @6 r3 }" C u2 G (特指垂直方向)主要由月球及太阳引力引起,具体原理,性质在此不作介绍。由于每时每刻潮汐都在变化,我们要得到固定的绝对水深,需要一个基准。
一般我们取天文潮汐最低潮作为这个基准Chart Datum,这个在各地方也会不一样,需要地方验潮站经年累月的观测。一般,它与多年平均海水面高度间的差异会是一个常数,而多年平均海水面即该处的大地水准面
# Z) c( r& l! K2 K1 `" Y+ Z geoid,是大地测量外业的基准面。
潮汐改正就是当前水面到这个Chart Datum基准的垂距。实际测量中有两种方法计算潮汐改正。2 u, r+ ], r+ @# i1 l$ `) d
第一种如图一左侧所示,在岸边水里立一水准尺
) _2 |. z! U4 {
3 i( {' [4 p" A" T* Q! Q' u (一般5米吧),然后通过水准仪高程传递到临近的水准点Benchmark(也可以是多个,然后作平差),这样岸边测潮水准尺tide staff顶端的高程(相对于geoid)可知。又可在测潮水准尺tide staff上读出当前水面高度observed level,那么我们可以由下式计算潮汐改正:
Tide correction= Staff top level+known constant-(staff height-observed level)
% w: n3 V5 A5 {; z) Q1 c! E 潮汐改正=测潮水准尺顶端高程+大地水准面与海图基准常数差-(测潮水准尺高-当前水位读数)
X, C% s7 i3 j" R3 X0 i- G: c known constant 即为所用Chart Datum 与大地水准面之间的已知常数。
+ X* D, P! O, W8 S9 L+ @: E
% Y% n; e4 M% H
第二种方法是直接用GPS RTK 测得相对于WGS84椭球面的高,再通过大地水准面精化
模型得大地水准面差距geoid gap
" ^( K! k5 S4 x J6 X/ M- K6 [4 N 然后有如下表达式:
Tide correction= GPS height-geoid gap+known constant-antenna height' ?( q. Z' N( l
潮汐改正=GPS高-该处大地水准面差距+大地水准面与海图基准常数差-GPS天线到水面高
( e+ p# \% R* ^/ f! F/ H# e) G 第二种方法比较方便,但大地水准面精化毕竟还不成熟,RTK Z方向误差也要厘米级了,精度会低点,这就和地面上传统水准测量还没被GPS高程测量取代是一个道理。
# X8 H+ ]" E+ I! _+ K% l5 [
参照图一中间,得到潮汐改正后,我们再由测姿态的IMU得到roll,pitch,heave 改正,由水声学模型得到声速改正,易测得shift(水面到transducer底)然后我们所要求的水深chart depth
4 n7 Y* Q1 L; R1 }2 v
8 U4 W; Z. T5 i2 y7 B1 h7 r 就可以按如下表达式得到了:
chart depth=observed depth+shift+roll pitch heave correction+sound velocity correction-tide correction2 V7 A( t) z6 ^
海图深度=观测深度+声波发射接受器安放位置改正+船的侧倾俯仰上下浮动改正+声速改正-潮汐改正
0 m, G2 G8 i4 @ x
* S1 |* h: k( V 这样我们就得到了海图深度Z 坐标,由于GPS和transducer的安装水平位置一般不一样,我们还要作一个平移,还有船姿态的旋转变换才能得到transducer位置的精确XY坐标
至此,我们测水底点三维坐标的任务就完成啦。由于单波束声呐在航线上也是以某一频率测离散点的,按Z字折返测得到的也是测区的离散点坐标,故需插值建立DEM,这和地面测量也概念差不多。2 I9 v" I' g1 c- i+ K/ Y) J. D
数字地形建模完成后用一些GIS算法就可以进行各种查询与分析,有各种应用啦,求区域水量也是其中之一。
$ ]. q; v" O, A4 `9 `
[由于这门课是用英语学的,那些术语真不知怎么翻译,见谅]
+ |- D% M% w& j (●—●)(●—●)(●—●)(●—●)(●—●)
: Y( T* p$ C& R D2 K" s
最后抒发点无用的情绪
6 M2 d( h; A; z+ j 交换的学校的测绘与地信系的slogan是Geomatics expresses our world. 个人感觉还是挺贴切的,测绘不是一门无用的学科,它也许不能切实的改变我们的世界,极大地改善我们的生活,也许没有艰深的理论,独树一帜的体系,但经由测绘,这个世界的确被更好地,更精确地展现在我们面前。这大概已经是我这样的民工最大的欣慰啦。
" d' g E% P* d! M