|
1 E/ J1 W% z: t! q# @6 L 
8 M2 K( _, v* `; L5 ` 
$ K! ^% d$ \. }4 d2 F( U/ |
从石油、天然气到动植物研究,广袤的海洋有着太多吸引人的地方。一直以来,人们对于海洋的探索也从未停止过。为了能够更好的达到水下研究的目的,也出现了各种各样潜水器和水下机器人设备。
5 x* N+ X* ^* |# l( a! g 过去的很长一段时间里,潜水深度可能是最受关注的地方,而随着人们对于海洋研究的进一步深入,也出现了很多其它的问题。在设备的设计上,以螺旋桨作为动力装置无疑是目前最为成熟的一种方式。
^; J3 H6 Q( {: f 
7 q( \+ m6 a" }& G) ?: a 图片来自视觉中国 : i" P p" p+ k8 L; c, j
但把它用在科学研究的设备上,存在很多不足之处。首先从环境保护的角度出发,潜水设备的螺旋桨难免对海底动植物造成损伤。除此之外,由于螺旋桨所产生的噪音很大,很难保证你能够获得海底动物真实的活动状态,这也会导致后期研究过程会出现不准确的情况。
1 g; h9 b, n6 Y. g 当然,人类的智慧是无穷的。在意识到传统潜水设备所存在的问题后,也有不少厂商或者相关的研究机构开始推出仿生机器人,来获得更真实的数据。
8 Q' W% x' w3 }/ W( @6 i) c, u 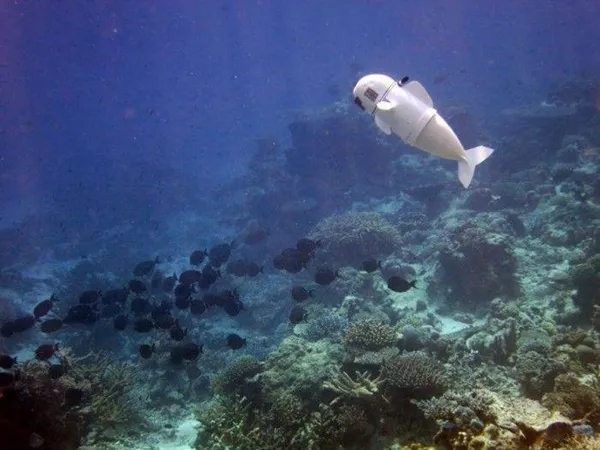
: f* j6 x& D" ?) p 图片来自 cnBeta 7 \5 E2 {: ^$ {' M, W: A
援引The Verge的报道,麻省理工学院(MIT) 计算机科学和人工智能实验室(CSAIL)的科学家们开发出了一款名为SoFi的机器鱼。 Z9 I" U$ P$ e- Z* Q8 X$ [! j' e

1 {( D y A2 O+ Q, |* I 图片来自 cnBeta
* }$ p! t7 V: [2 d4 X2 y 和我们平时看到的鱼类一样,SoFi同样设计有类似于鳍和尾的结构。另外,在其头部中央位置,还配备了高清摄像头,来提供图片和视频拍摄功能。
! s( _! a- N. x( \5 B, g# K 值得一提的是,SoFi在材质方面选择了硅胶和柔性塑料,而非金属。这也意味着,相比其它同类产品,它能够做到更好的成本控制。 }& G/ b5 t) X1 c8 _5 ]+ D
4 g3 E# D: G B% A( q
图片来自 cnBeta 6 |- @, s. m3 ?! i5 F d1 N( Z
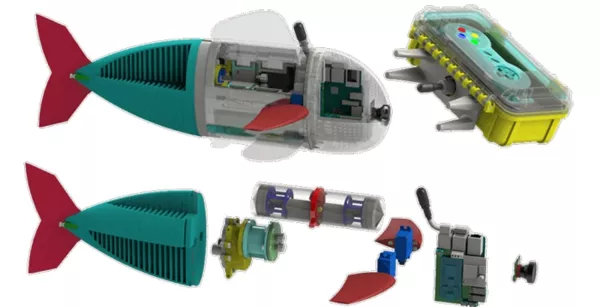
大家比较关注的动力部分,除了上边我们提到的「鳍」,SoFi的内部还有充满压缩空气的浮力舱以及可调的重量舱,通过这些装置的配合,来实现垂直方向上的位置变化。 6 K3 V. M; z8 \
除此之外,SoFi内部配备有电机,它可以将水泵入机器鱼内部两个像气缸一样工作的气室,从而来驱动尾巴摆动,达到前行的目的。CSAIL博士候选人 Robert Katzschmann表示,据我们所知,这是第一种可长时间不受限制地在三维空间中游泳的机器鱼。
% I& f4 I) Z- P, z/ {+ K% c9 E5 r 
1 b" U2 d' f! X+ x$ h: @& [( e( g1 f
图片来自 cnBeta $ U- r8 q+ ^4 c
而对比传统螺旋桨式设计,SoFi动力装置优点主要有两点。首先在机器鱼运动过程中,它所产生的噪音要小很多,另外一点是,由于没有像螺旋桨一样的叶片结构,也可以避免对海底生物造成伤害。
8 g4 M, R7 U4 l, W$ g: D 
1 i+ y+ k7 e" v( O+ ~( ^! Z" ] 图片来自 cnBeta
2 I; r0 P) F; z% Q& _, p 至于SoFi的未来,CSAIL主管Daniela Rus表示,我们认为SoFi是开发水下观测台的第一步,它有可能成为海洋探索的新型工具,并为揭开海洋生物的奥秘开辟新的途径。
* q2 e! L4 S& g+ Z) ?% d 当然,也正如Daniela Rus所说,一切都还是未知数,想要达到预期中的目标,包括续航、下潜深度、控制方式等等很多方面,SoFi还有很长的一段路要走。
) v2 a$ K" ~: v. \1 f8 S. I" I1 a 来源:极客公园 中国海洋网通讯员招募令:. k! {% {. N& I
为了给广大海洋爱好者一个展示自我的平台和机会,进一步丰富中国海洋网的原创内容,现面向全国招募通讯员,并向社会各界人士广泛约稿,我们将选取有价值的原创内容在海洋网及海洋网微信平台进行推送。同时,成为我们的通讯员后,您还将获得“中国海洋网通讯员”荣誉证书,参加我们定期举办的培训及相关活动。 ; N5 z) |; |6 T6 _4 i0 Z
了解详情请加工作QQ:2640898331
* n* l( A: H2 w" { B { 版权声明:中国海洋网致力于好文推送,版权属于原作者,部分文章推送时未能与原作者取得联系,或无法查实原作者姓名,在这里对你们表示深深的歉意。若涉及版权问题,烦请原作者留言联系我们。
3 ~1 T+ N# ~- T. [) a4 J$ u' e( L 
5 X; C! g! Q; C2 N4 {9 F4 L
4 l/ H3 Z. t$ Q; W
$ k. s" T* V( O/ H( K
3 Z) m3 I' g+ X: H% F5 W) e& L- I3 j2 Q# W0 a# ?! h0 e
| 

