|
, h2 y) Q+ @1 c- O) J еҺҹж Үйўҳпјҡе…Ёз«ҷд»Әи§ӮжөӢеҜјзәҝжөӢйҮҸе№іе·®ж–№жі•пјҢе…ЁжҳҜе№Іиҙ§пјҢеҝ«ж”¶и—ҸпјҒ
5 O/ J( h# o. u+ o
h# Q& W" L4 k зӮ№еҮ»дёҠж–№гҖҗеӨ§ж°ҙзүӣжөӢз»ҳгҖ‘е…іжіЁжҲ‘们 2 f" U7 s1 u0 N5 W
йҡҸзқҖе…Ёз«ҷд»ӘеңЁе·ҘзЁӢжөӢйҮҸдёӯеә”з”Ёзҡ„йҖҗжёҗжҷ®еҸҠ,йҮҮз”ЁеҜјзәҝдҪңдёәжөӢйҮҸзҡ„е№ійқўжҺ§еҲ¶и¶ҠжқҘи¶Ҡе№ҝжіӣпјҢеҜјзәҝдёҖиҲ¬еӨҡеёғи®ҫжҲҗеҚ•дёҖеҜјзәҝгҖӮеә”з”Ёе…Ёз«ҷд»Әи§ӮжөӢеҜјзәҝпјҢеҸҜд»ҘйҖҡиҝҮжңәеҶ…зҡ„еҫ®еӨ„зҗҶеҷЁпјҢзӣҙжҺҘеҫ—еҲ°ең°йқўзӮ№зҡ„е№ійқўиҝ‘дјјеқҗж ҮпјҢеӣ жӯӨеңЁжҲҗжһңеӨ„зҗҶж—¶еҸҜд»Ҙеә”з”Ёиҝҷдәӣиҝ‘дјјеқҗж ҮзӣҙжҺҘжҢүеқҗж Үе№іе·®пјҲеҚій—ҙжҺҘе№іе·®пјүжі•иҝӣиЎҢе№іе·®гҖӮиҝҷе°ҶдјҳдәҺиҝҮеҺ»еҜјзәҝи®Ўз®—иҝҮзЁӢдёӯе…ҲиҝӣиЎҢиҫ№гҖҒи§’е№іе·®еҗҺпјҢеҶҚжұӮеҸ–еқҗж Үзҡ„ж–№жі•гҖӮжң¬ж–Үдё»иҰҒй’ҲеҜ№йҮҮз”Ёе…Ёз«ҷд»Әи§ӮжөӢеҜјзәҝзҡ„иҝ‘дјје№іе·®е’ҢдёҘеҜҶе№іе·®ж–№жі•иҝӣиЎҢжҺўи®ЁгҖӮ 1 a9 v( O' O/ I/ G) f6 i, k
$ N& o# U! @* r* R/ l
еҜјзәҝзҡ„иҝ‘дјјеқҗж Үе№іе·® 6 u( J) C* V. C" e
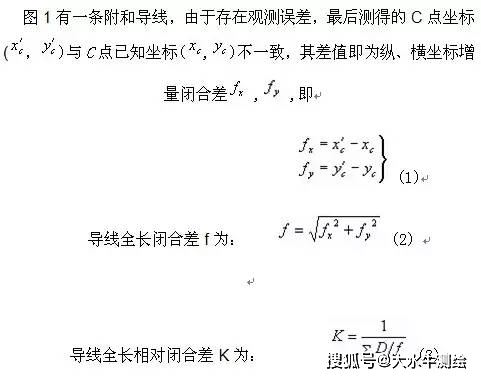
еҜјзәҝжөӢйҮҸз”ЁдәҺеӣҫж №жҺ§еҲ¶зӯүдҪҺзІҫеәҰжөӢйҮҸдёӯпјҢеҫҖеҫҖйҮҮз”Ёиҝ‘дјје№іе·®еҚіеҸҜгҖӮз”ұдәҺе…Ёз«ҷд»ӘзӣҙжҺҘжөӢе®ҡеҗ„еҜјзәҝзӮ№зҡ„иҝ‘дјјеқҗж ҮеҖјпјҢе№іе·®и®Ўз®—е°ұдёҚз”ЁеғҸдј з»ҹзҡ„еҜјзәҝиҝ‘дјје№іе·®и®Ўз®—йӮЈж ·пјҢе…ҲиҝӣиЎҢи§’еәҰй—ӯеҗҲе·®и®Ўз®—е’Ңи°ғж•ҙпјҢ然еҗҺжҺЁз®—ж–№дҪҚи§’пјҢеҶҚиҝӣиЎҢеқҗж ҮеўһйҮҸй—ӯеҗҲе·®зҡ„и®Ўз®—е’Ңи°ғж•ҙпјҢжңҖеҗҺж №жҚ®е№іе·®еҗҺзҡ„еқҗж ҮеўһйҮҸи®Ўз®—еҜјзәҝзӮ№зҡ„еқҗж ҮгҖӮе…Ёз«ҷд»Әи§ӮжөӢеҜјзәҝзӣҙжҺҘжҢүеқҗж Үе№іе·®и®Ўз®—пјҢе°Ҷжӣҙдёәз®ҖдҫҝгҖӮзӣҙжҺҘжҢүеқҗж Үе№іе·®жі•и®Ўз®—жӯҘйӘӨеҰӮдёӢпјҡ 3 Y; U# v4 c+ V' `
; S$ R/ ~) A* B6 _, E5 \- t 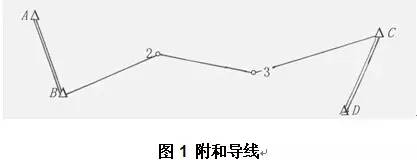
2 N# d' h8 w% C1 \" a 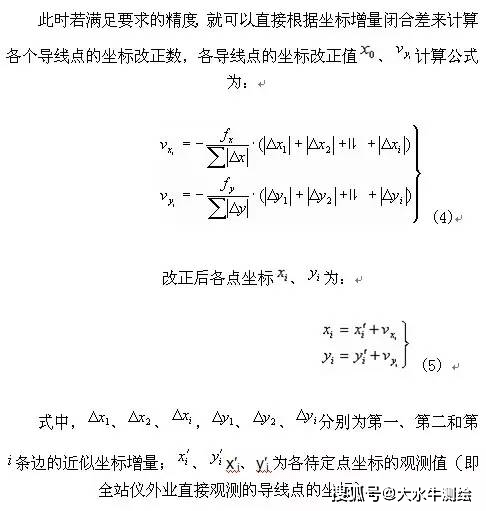
2 x0 y; ?4 Y' i/ T: x йҮҮз”Ёеқҗж Үжі•иҝӣиЎҢеҜјзәҝиҝ‘дјје№іе·®пјҢзӣҙжҺҘеңЁе·Із»ҸжөӢеҫ—еҜјзәҝзӮ№зҡ„еқҗж ҮдёҠиҝӣиЎҢж”№жӯЈпјҢж–№жі•з®ҖеҚ•пјҢжҳ“дәҺжҺҢжҸЎпјҢйҒҝе…ҚдәҶдј з»ҹиҝ‘дјје№іе·®жі•зҡ„ж–№дҪҚи§’зҡ„жҺЁз®—е’Ңж”№жӯЈпјҢд»ҘеҸҠеқҗж ҮеўһйҮҸзҡ„и®Ўз®—е’Ңж”№жӯЈпјҢиғҪеӨ§еӨ§жҸҗй«ҳе·ҘдҪңж•ҲзҺҮпјҢиҖҢдё”дёҚжҳ“еҮәй”ҷгҖӮеҗҢж—¶еҸҜд»ҘзңӢеҮәдј з»ҹйҷ„е’ҢеҜјзәҝжөӢйҮҸйңҖиҰҒдёӨжқЎе·ІзҹҘиҫ№пјҢдҪңдёәж–№дҪҚи§’зҡ„жЈҖж ёжқЎд»¶пјҢиҖҢзӣҙжҺҘеқҗж Үжі•пјҢеҸӘйңҖиҰҒдёҖжқЎе·ІзҹҘиҫ№е’ҢдёҖдёӘе·ІзҹҘзӮ№еҚіеҸҜпјҢдҪҝеҜјзәҝзҡ„еёғзҪ‘жӣҙеҠ зҒөжҙ»гҖӮ
, _; ]+ ^0 t) W еҜјзәҝзҡ„дёҘеҜҶеқҗж Үе№іе·®
: {4 Y: Z0 T3 s& c& S8 N й«ҳзӯүзә§е№ійқўжҺ§еҲ¶жөӢйҮҸеҜ№зІҫеәҰзҡ„иҰҒжұӮиҫғй«ҳпјҢйңҖиҰҒдёҘеҜҶе№іе·®гҖӮе…Ёз«ҷд»Әи§ӮжөӢзҡ„еҜјзәҝйҮҮз”ЁдёҘеҜҶеқҗж Үе№іе·®жі•иҫғдёәйҖӮе®ңгҖӮдёҘеҜҶеқҗж Үе№іе·®еҸ–еҫ…е®ҡзӮ№зҡ„еқҗж Үе№іе·®еҖјдҪңдёәжңӘзҹҘж•°пјҢйҖҡиҝҮе№іе·®и®Ўз®—еҸҜзӣҙжҺҘеҫ—еҲ°еҗ„еҫ…е®ҡзӮ№зҡ„еқҗж ҮгҖӮдҪҶиҝҮеҺ»еҪұе“Қеә”з”Ёеқҗж Үе№іе·®пјҲй—ҙжҺҘе№іе·®пјүжі•зҡ„дё»иҰҒеҺҹеӣ жҳҜиҫ…еҠ©и®Ўз®—йҮҸеӨ§пјҢе°Өе…¶жҳҜеңЁеҲ—з«ӢиҜҜе·®ж–№зЁӢд№ӢеүҚ,йңҖиҰҒжҢүиҝ‘дјје№іе·®ж–№жі•е°Ҷе…ЁйғЁеҜјзәҝзӮ№зҡ„иҝ‘дјјеқҗж ҮжҺЁз®—еҮәжқҘпјӣйҮҮз”Ёе…Ёз«ҷд»Әи§ӮжөӢеҜјзәҝпјҢеңЁжөӢйҮҸдёӯеҸҜзӣҙжҺҘеҫ—еҲ°еҫ…е®ҡзӮ№зҡ„иҝ‘дјјеқҗж ҮпјҢеӣ жӯӨдёҚеҝ…еҶҚи§Јз®—еҫ…е®ҡзӮ№зҡ„иҝ‘дјјеқҗж ҮгҖӮеҸҰдёҖж–№йқўеқҗж Үе№іе·®жі•иҜҜе·®ж–№зЁӢејҸзҡ„еҲ—з«Ӣз®ҖеҚ•дё”жңү规еҫӢжҖ§пјҢдҫҝдәҺзј–еҲ¶зЁӢеәҸгҖӮеқҗж Үе№іе·®жі•иҷҪ然法方зЁӢзҡ„йҳ¶ж•°иҫғй«ҳпјҢдҪҶеҲ©з”Ёзј–еҲ¶зҡ„зЁӢеәҸиҫ“е…Ҙи®Ўз®—жңәдёӯи§Јз®—пјҢд»ҚжҳҜеҝ«жҚ·иҝ…йҖҹзҡ„пјҢиҝҷжҳҜдј з»ҹжқЎд»¶е№іе·®ж— еҸҜжҜ”жӢҹзҡ„пјҢеӣ жӯӨйҮҮз”Ёеқҗж Үе№іе·®жі•е№іе·®е…Ёз«ҷд»ӘеҜјзәҝжҳҜжҜ”иҫғйҖӮе®ңзҡ„гҖӮ
* D, N9 |5 P9 ]. C( ? 
6 m& c7 W: Z+ Q9 s% [$ A; ] \ еқҗж Үе№іе·®дёӯиҫ№гҖҒи§’и§ӮжөӢеҖјжқғзҡ„зЎ®е®ҡ % h% e: B( ~2 a8 Y/ K
еқҗж Үе№іе·®е·ІжҳҜдёҖз§ҚжҲҗеһӢзҡ„е№іе·®ж–№жі•пјҢжңүе…іе…¶еҺҹзҗҶгҖҒи®Ўз®—е…¬ејҸе’Ңи®Ўз®—жӯҘйӘӨзӯүеңЁеҗ„з§Қе№іе·®ж–ҮзҢ®дёӯйғҪжңүиҫғз»Ҷзҡ„жҺЁеҜје’ҢеҸҷиҝ°пјҢиҝҷйҮҢеҸӘе°ұеә”з”ЁиҜҘжі•е№іе·®е…Ёз«ҷд»Әи§ӮжөӢеҜјзәҝиҝҮзЁӢдёӯпјҢжңүе…іиҫ№гҖҒи§’жқғзҡ„зЎ®е®ҡж–№жі•и°ҲдёҖзӮ№дҪ“дјҡгҖӮ
/ n( z% o& i# x7 _% N8 A 1гҖҒиҫ№гҖҒи§’и§ӮжөӢиҜҜе·®ж–№зЁӢејҸ
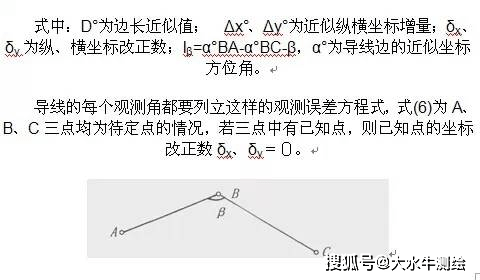
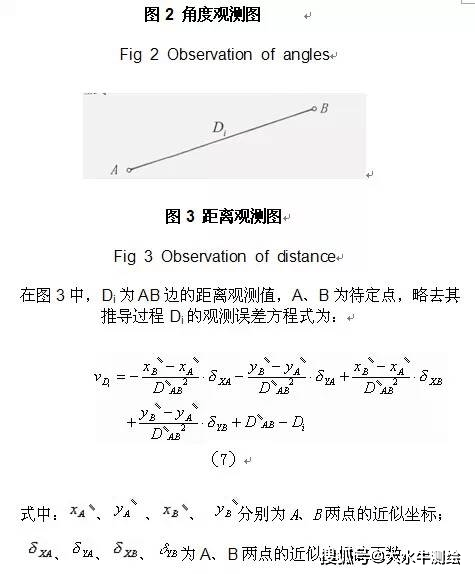
+ F& u7 D4 }5 |1 ]* [0 ~$ l6 J еқҗж Үе№іе·®жі•и®Ўз®—пјҢйҰ–е…ҲжҳҜеҲ—з«ӢиҜҜе·®ж–№зЁӢејҸгҖӮеҜјзәҝе№іе·®жңүи§’еәҰе’Ңиҫ№й•ҝдёӨз§Қзұ»еһӢиҜҜе·®ж–№зЁӢејҸпјҢеңЁеӣҫ2дёӯпјҢОІдёәи§ӮжөӢи§’еәҰпјҢз•ҘеҺ»жҺЁеҜјиҝҮзЁӢпјҢе…¶иҜҜе·®ж–№зЁӢдёәпјҡ . R- L8 t6 M, D$ j" ~( C

1 g, O' h. t2 x) y
; {5 W! y& l2 O8 P, H; S3 o
1 T, W' y* F' a& j% W2 e еә”з”ЁдёҠиҝ°дёӨзұ»иҜҜе·®ж–№зЁӢејҸз»„жҲҗжі•ж–№зЁӢејҸж—¶пјҢеӣ иҫ№гҖҒи§’зҡ„и§ӮжөӢзІҫеәҰдёҚзӯүпјҢеҲҷе…¶жқғдёҚзӯүгҖӮеҚідҪҝиҫ№д№Ӣй—ҙжҲ–и§’еәҰд№Ӣй—ҙиӢҘйқһзӯүзІҫеәҰи§ӮжөӢпјҢе…¶жқғж•°д№ҹжҳҜдёҚзӯүзҡ„гҖӮеӣ жӯӨе°ұиҰҒеҗҲзҗҶең°зЎ®е®ҡе…¶жқғж•°пјҢи§ӮжөӢеҖјзҡ„жқғжҳҜз»„жҲҗжі•ж–№зЁӢзҡ„йҮҚиҰҒе…ғзҙ пјҢжқғзЎ®е®ҡзҡ„еҗҲзҗҶдёҺеҗҰпјҢзӣҙжҺҘеҪұе“ҚеҲ°и®Ўз®—з»“жһңгҖӮ
5 | F* N% Y _ 2гҖҒеҚ•дҪҚжқғдёӯиҜҜе·®е’Ңжқғзҡ„зЎ®е®ҡ
. l1 M8 J8 U' L еә”з”Ёе…Ёз«ҷд»Әи§ӮжөӢзҡ„еҜјзәҝпјҢжөӢи·қзІҫеәҰиҫғй«ҳпјҢйҖҡеёёиҫ№гҖҒи§’еҗҢж—¶жөӢеҫ—пјҢжҚ®жӯӨ笔иҖ…и®ӨдёәжҢүеҰӮдёӢж–№жі•зЎ®е®ҡе…¶жқғиҫғдёәеҗҲзҗҶгҖӮ(1)еҜјзәҝжүҖжңүзҡ„иҪ¬жҠҳи§’еӣ жөӢйҮҸзҡ„жөӢеӣһж•°зӣёзӯүпјҢжҢүзӯүжқғеҜ№еҫ…пјҢ并и®ҫи§’еәҰи§ӮжөӢдёӯиҜҜе·®дёәеҚ•дҪҚжқғдёӯиҜҜе·®пјҢеҚіОј0=mОІгҖӮ(2)еҜјзәҝиҫ№зҡ„и§ӮжөӢпјҢеӣ еҗ„иҫ№и·қзҰ»дёҚзӯүпјҢеҲҷеҗ„иҫ№зҡ„и·қзҰ»и§ӮжөӢзІҫеәҰдёҚзӯүпјҢеҸҜд»Ҙж №жҚ®е…Ёз«ҷд»Әзҡ„ж Үз§°жөӢи·қзІҫеәҰжұӮеҮәжҜҸжқЎиҫ№зҡ„жөӢи·қдёӯиҜҜе·®пјҢеҶҚжҢүжқғзҡ„е®ҡд№үе…¬ејҸпјҢзЎ®е®ҡжҜҸдёҖжқЎиҫ№зҡ„жқғеҖјгҖӮ 7 {* B: n$ E! T+ z

1 u0 p+ w- f. C1 r f+ X7 _ дҫӢеҰӮпјҡз”ЁжӢ“жҷ®еә·GTS-701е…Ёз«ҷд»Әи§ӮжөӢдәҶдёҖжқЎеҜјзәҝпјҢзҺ°е°ұе…¶еҚ•дҪҚжқғдёӯиҜҜе·®зҡ„зЎ®е®ҡж–№жі•е’Ңжқғзҡ„и®Ўз®—ж–№жі•еҠ д»ҘиҜҙжҳҺпјҡиҜҘд»ӘеҷЁзҡ„жөӢи§’ж Үз§°зІҫеәҰдёәВұ2вҖіпјҢиӢҘеҜ№еҜјзәҝжүҖжңүиҪ¬жҠҳи§’иҝӣиЎҢдёҖжөӢеӣһи§ӮжөӢпјҢеҲҷи§’еәҰзҡ„и§ӮжөӢдёӯиҜҜе·®mОІ=Вұ2вҖіпјҢи·қзҰ»и§ӮжөӢж Үз§°зІҫеәҰдёәВұпјҲ3+2Г—10-6В·DпјүmmпјҢе…¶дёӯDдёәи§ӮжөӢиҫ№зҡ„и·қзҰ»пјҢд»Ҙе…¬йҮҢдёәеҚ•дҪҚгҖӮеӣ жӯӨеҸҜд»Ҙж №жҚ®и§ӮжөӢиҫ№зҡ„и·қзҰ»и®Ўз®—еҮәжҜҸжқЎиҫ№зҡ„дёӯиҜҜе·®гҖӮдҫӢеҰӮжҹҗжқЎиҫ№зҡ„и§ӮжөӢи·қзҰ»дёә1325.375mпјҢеҲҷиҜҘиҫ№зҡ„и·қзҰ»и§ӮжөӢдёӯиҜҜе·®дёәmDдёәmD=Вұ(3+2Г—1.325375)mm=Вұ5.65mmоҖҠгҖӮжқғзҡ„зЎ®е®ҡеҸҜеҸ–и§’еәҰи§ӮжөӢдёӯиҜҜе·®дёәеҚ•дҪҚжқғдёӯиҜҜе·®пјҢеҚіОј0=mОІ=2вҖіпјҢеҲҷи§’еәҰи§ӮжөӢеҖјзҡ„жқғPОІдёәпјҡ
2 B D# K5 _" c, t 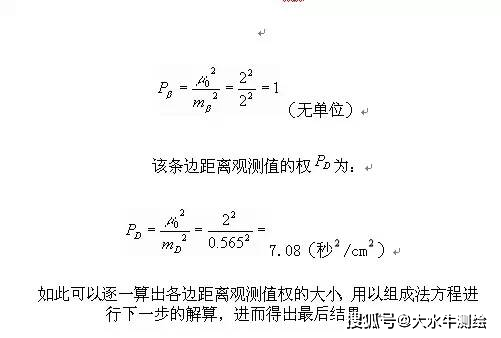
' I/ U% P2 d+ _ з»“иҜӯ
! D2 O# ?! B7 Q з»јдёҠжүҖиҝ°пјҢеңЁеҜјзәҝе№ійқўжҺ§еҲ¶жөӢйҮҸдёӯпјҢеә”з”Ёе…Ёз«ҷд»Әи§ӮжөӢпјҢеӣ дёәеҫ…е®ҡзӮ№зҡ„иҝ‘дјјеқҗж ҮеңЁи§ӮжөӢж—¶еҸҜеҗҢж—¶еҫ—еҲ°гҖӮй’ҲеҜ№иҜҘжғ…еҶөпјҢеңЁжӯӨеҲҶеҲ«жҸҗеҮәдәҶиҝ‘дјје’ҢдёҘеҜҶзҡ„еқҗж Үе№іе·®ж–№жі•пјҢдҫӣиҜ»иҖ…еңЁе®һйҷ…еә”з”ЁдёӯеҸӮиҖғгҖӮдёҖиҲ¬дҪҺзӯүзә§жҺ§еҲ¶жөӢйҮҸйҮҮз”Ёиҝ‘дјјеқҗж Үе№іе·®е°ұеҸҜж»Ўи¶ізІҫеәҰиҰҒжұӮпјҢй«ҳзӯүзә§жҺ§еҲ¶жөӢйҮҸеә”йҮҮз”ЁдёҘеҜҶе№іе·®зҡ„ж–№жі•иҝӣиЎҢи§Јз®—пјҢеҸҜж №жҚ®е№ійқўжҺ§еҲ¶жөӢйҮҸи®ҫи®Ўзҡ„зӯүзә§е’ҢзІҫеәҰиҰҒжұӮиҖҢйҖүз”Ёзӣёеә”зҡ„е№іе·®ж–№жі•гҖӮиҝ”еӣһжҗңзӢҗпјҢжҹҘзңӢжӣҙеӨҡ
, g6 [% h d, K2 x5 M/ y
5 _& O5 \/ T9 a9 x+ l- |7 ^% x иҙЈд»»зј–иҫ‘пјҡ
4 z+ ~5 [: r4 P l: E9 f8 i
' |; `0 D; H2 j
7 S$ k' }; ^$ C7 b1 L& M7 \0 `4 `3 `* ]
3 b* l) d1 T; M. r( `
| 











