 - }( s0 ?" n; S, n- U% V+ d( g- U - }( s0 ?" n; S, n- U% V+ d( g- U
点击上方蓝字关注我们 " n# ]2 g( ~- Y
摘要:本文介绍了近年来海水悬浮物浓度间接测量方法、国内外海水悬浮物原位采样与过滤技术进展和深海原位微孔过滤技术,总结了海水原位采样与过滤技术和设备的不足和未来的发展方向。本文可以为青岛海上综合试验场项目试验环境构建与观测系统专项水体悬浮物相关内容提供参考。
$ V! H9 E- P- G! [8 T+ z 
2 X2 W" @, N: B+ u9 s: B5 R+ A. X 引言
' B# R( G% O% w( W! j% N4 u 海水悬浮物(SPC)指海水中的悬浮颗粒物和浮游微生物等。对海水中的悬浮物进行准确的观测,在研究海洋物质运输和水体元素特征等方面具有重要的意义。在近海,海水悬浮物直接影响着海水的水质、地球化学形态、生物群落等。在深海,海水悬浮物(包括浮游微生物及痕量元素等)的研究同样具有重要意义。这些研究都需要收集比较全面的海水样本,需要大容量和精准定位的原位样本采集系统。 + P: X3 N0 E1 |- r6 K! \
海水悬浮物浓度的测量,主要的方式有两种,一种是传统的测量方法,一种是现代的测量方法。传统的测量方法是从现场采集海水(3点或6点法),然后过滤海水样品,进行称重,计算海水悬浮物的质量、浓度,这是目前最为准确的测量方法,但缺点是比较耗时,同时,还需要较大的耗费,获得海水悬浮物数据只能为某几层的深度,且时间间隔较大。现代的测量方法是利用光学、声学、密度、介电常数等间接测量得到海水悬浮物的浓度,可以得到具有较高时间空间分辨率的海水悬浮物的信息,但是这是一种间接观测海水悬浮物浓度的方法,测量精度低,需要定期校准使用的设备,限制了测量深度的应用。
; M& z1 Q+ U0 G2 R 海水悬浮物原位过滤测量技术可以较好解决传统测量方法和现代测量方法的不足,发展的方向是能够省时省力实现多测点、全水深多水层、长时次海水悬浮物浓度的立体测量。 / a' Y( \) _, Q; o2 o0 o
一、海水悬浮物浓度间接测量方法
) T1 u3 e8 L0 A+ S) i 传统上,海水悬浮物浓度测量通常采用现场获取水样进行封装,在实验室过滤称重计算的方法;近年来,发展了多种间接测量方式,即现代方法,包括光学法和声学法等,其中,光学法主要通过光学浊度计、光学后散射传感器(OBS)或激光粒度仪(LISST)等来实现,声学方法主要通过声学后散射传感器(ABS)来实现。
- d2 U0 Y3 C/ D7 M6 G (一)光学浊度计反演海水悬浮物浓度
( f( z6 d2 r* T+ I9 m% R7 m9 l 光学浊度计是通过测量光束通过水体的散射或透射光,来计算样品体积的浊度。该测量技术优点主要是设备易于安装和水中布放,数据采集快速;不需要辅助测量,如温度、压力等参数,只需要由浊度反演获得悬浮颗粒物浓度值;光学浊度计在所有悬浮颗粒物浓度测量设备中成本最低。但具有如下限制主要是浊度测量值高度依赖测量环境(悬浮颗粒物的截面、颜色和尺寸,水体有无气泡等),经验模型不具备普遍性,需要现场标定,建立回归模型,尤其是对悬浮物尺寸的变化高度敏感;光学浊度测量受限于生物附着和结垢,并会改变设备的校准曲线;不同制造商的光学浊度仪不具备可比性。
8 p1 T( `% x0 A, V (二)基于声学技术测量海水悬浮物浓度. |( r, l6 z, D% B/ z5 W7 V
基于声学技术的悬浮物浓度测量仪器,是利用压电换能器将声音脉冲发射到介质中,水体中的颗粒产生脉冲能量回波,这种后向散射能量由相同的换能器进行感测,依靠接收的回波强度来反演悬浮颗粒物浓度。该测量技术的优点主要是声学测量仪器具有非侵入性,相比光学测量仪器,不易受生物结垢的影响;声学测量可以实现水体断面的沉积物性质测量。但具有如下限制主要是将后向散射信号转换为悬浮颗粒物浓度的算法较为复杂,需要对环境水体性质和仪器特性进行补偿测量,因此需要辅助测量温度、盐度等参数;使用单频率声学仪器来区分悬沙浓度(SSC)和粒径分布(PSD)之间的变化存在困难;声学仪器的后向散射强度响应在较高SSC处是非线性的,使用声学仪器进行SSC测量的误差随着PSD的变化而增加;声学方法适合于在有限粒径尺寸范围内的测量,不适用于粒径低于10μm的悬浮物质测量。
1 O; p, B5 I. I6 e( C' O2 L& j5 d (三)激光衍射测量海水悬浮物浓度方法& N8 m4 Z$ p) I0 T/ K2 H! R
激光粒度仪LISST是一种较为成熟的仪器,用于连续测量沉积物性质。LISST是将激光发射器、接收器、控制单元、存储单元以及电池集成在一个密封、耐压的壳体内,其原理是利用不同波长的激光在通过悬浮颗粒周围时发生衍射,光线方向发生改变,通过记录不同波长光束的偏转角,再通过概率统计来计算单位体积液体中不同粒径颗粒的含量。该测量技术优点是目前现代测量仪器中最准确、可靠的方式;能够测量水体中天然沉积物的粒径分布以及数目,精度约10%;在粒度测量范围内,基于激光衍射的悬浮颗粒物浓度测量不会由于悬浮粒径分布的变化而导致不准确,且无需频繁重新校准。但缺点是该技术受限于激光衍射反演算法,基于Mie散射理论的逆矩阵仅对已知折射率的均匀组分有效,并且无法穿透高浓度水体;LISST不能分辨混合样本颗粒间的窄峰,无法区分相似大小的颗粒;LISST对悬浮颗粒物的鉴别有一定适用范围;LISST的成本高于其他悬浮颗粒物浓度测量装置。 - K" N2 q* D: z1 {' ~5 O4 M) X8 h+ j
(四)基于水体电导特性测量海水悬浮物浓度) w/ K- ^8 r3 f3 ?+ M
测量不同悬浮沉积物水体的电导特性变化,来反演悬浮物浓度的方法有两种:一是直接测量表观介电常数的变化;二是测量水体电容的变化,并通过预先建立的经验关系推算悬浮物浓度。基于水体电导特性测量海水悬浮物浓度这种方法的精度取决于水的盐度以及水体中气泡和藻类含量,该技术属于侵入性测量,并且易受生物附着和结垢的影响。利用水体电导特性测量悬浮物浓度的适用受到一定条件限制,目前尚处在理论研究阶段。 , i: ]3 L8 W% G, H7 i! p3 x! C
(五)基于压差的海水悬浮物浓度测量技术
% ^) S! O* C( V2 r S 基于压力差测量悬浮物浓度的设备,主要由在水柱中不同高度处两个高灵敏度的压力传感器组成。压力传感器监测流体密度,通过水温校正后由密度值差异计算悬浮物浓度值。该技术会受流体流速、温度的影响,主要取决于压力传感器的测量精度,信噪比较低。该测量技术的优点主要是压差技术的优势是能够进行悬浮颗粒物浓度高于10g/L的测量;基于压力差的悬浮物浓度测量相对稳定,没有生物堵塞和信号漂移的问题;基于压差的悬浮物浓度测量成本较低。但有以下几个限制主要是压差技术取决于压力传感器的灵敏度、流动湍流、溶解固体浓度、水密度以及悬浮物质的密度等;由于该测量方式具有低信噪比,该技术在悬浮物浓度低于10g/L时是不可靠的。 , \ c4 T" \' O6 ?
二、海水悬浮物原位采样与过滤技术进展; e3 `% b& P8 e, w
(一)国外海水悬浮物原位采样与过滤技术; e2 p( n7 P# Z0 ?
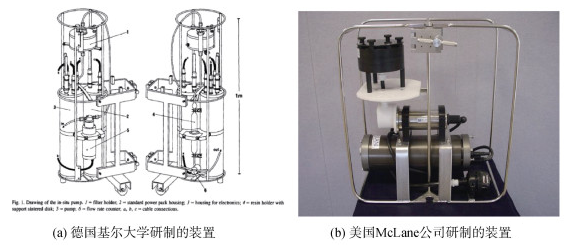
20世纪80年代,国外海水原位过滤技术的研究开发就已开始,美国的伍兹霍尔(Woods Hole)海洋研究所研究探索了海水原位过滤技术,并且开发了海水直流泵。20世纪90年代,德国的基尔大学海洋学院也开发了海水悬浮物原位过滤装置,工作深度达4000m。之后,Woods Hole海洋研究所和Mclane公司共同开发了一种大体积的海水水样抽滤采样系统(WTS-LV),并开发出了产品(图1)。 0 {6 q6 A( ?( e, _. v
该系统已进行了一系列的过滤取样研究,其通过大容量的海水原位微孔过滤采样器,可让海水通过过滤器支架内的吸附滤或薄膜滤纸,能够实现连续抽取海水,收集海水中的悬浮和溶解性颗粒物质。其可应用于海洋、河川、湖泊、水库等多种类型水体,实现对浮游生物样品、微量金属样品、沉积物颗粒等进行采样,工作主要功能部件采用汽缸泵,主体材料为钛合金及不锈钢,最大可承受5500m的水深压力。另外,也有用户基于研究的需要在深海微生物采样装置中嵌入了传感器,如温盐深传感器(CTD)、荧光计、浊度计等,用于取得样品区域环境参数。 . Q9 i( L1 R+ ^/ n2 |; P8 S: Y
" I: C" i' G) L& ^
图1 德国基尔大学和美国McLane公司分别研制的 3 H. P. |4 Q) ]6 U2 p
悬浮物原位过滤装置 + W8 O" g( `' ~& m( E
虽然该系统已经开发成为产品,但还有缺点。其缺点主要是该系统过滤装置的滤膜面积较小,容易引起滤网的堵塞;取滤膜时容易冲刷掉滤膜上的附着物、残留物,引起实验的误差;同时,其过滤器装置密封方式不好,测量结束后过滤装置内会有水液残留;流量计对水流有较大阻碍作用。国外使用该装置进行了一些探讨:关于实验室过滤结果和深海表层原位过滤结果的对比研究;关于一些特殊的应用,如海水中210Po和210Pb的检测,对检测结果以及误差校正修正系数等进行了相关分析研究;还有对此类装置进行比测,探讨其结果的准确性;实验误差因素和比对方法的研究,深入探讨了使用该装置的检测结果的准确性和误差因素等。
' `* k+ A* s, I: Q 目前,该系统可以作为传统的海水提升后到实验室进行过滤方法的重要补充。海水原位过滤技术能够实现大通量的海水过滤,如:一次单通道过滤水量超过100L,但是,要求滤膜不容易被堵塞,一般主要用在水质非常好的区域,如深海。 % I. `% @/ ?8 X! x5 c0 Z T3 ^0 t
(二)国内海水悬浮物原位采样与过滤技术
7 x) B6 `- E0 m 国内的海水原位过滤技术研究开发始于近10年,由中国科学院海洋研究所于2015年底成功开发了深海微生物原位获取原理样机,并进行了深海测试。这个系统的总成海水泵采用了油充电动机的隔膜泵,主体采用了钛合金(如图2所示)。工作深度最大可达到4000m,深海海水的过滤量达5L/min,能够进行3层的分级过滤,实现了较快完成高通量海水的原位过滤取样。
! B) Y( ~8 [& }# c- v# F 
2 K' h8 d- |+ L; \' R4 X# Y, T3 _
图2 中国科学院海洋所研制的深海微生物取样装置
: {) a( s, j3 _3 q 相对于WTS-LV,该深海海水原位采样及分级过滤系统在小型化的基础上,实现了更多层级滤膜的采样和较大范围的流量控制,两套原位抽滤系统的参数对比如表1所示。针对此类海洋装备的实际应用需求,该系统实现了所有部件的自主研制和深海测试及应用,尤其是深海泵的研发与应用。
8 ^6 T, `0 T3 n! G4 Z2 k% [ 表1 两套系统装置的参数对比
$ a$ L k: T9 e6 P/ K 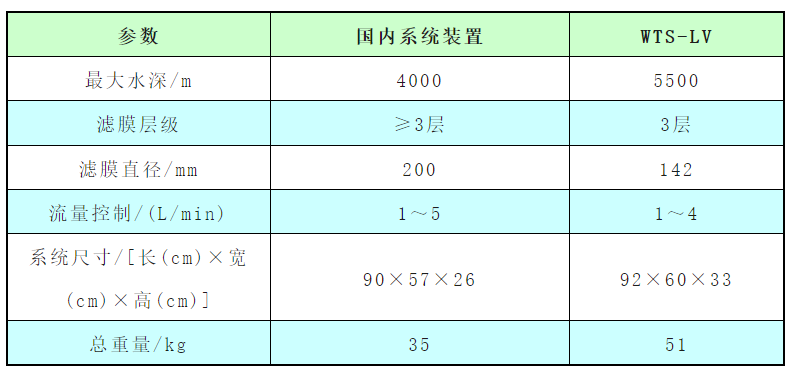
! F. f' ?+ I% y# C! n; v
(三)小结
9 }* s3 J8 B5 C( ^4 |# { 综合来看,国内外都开展了有关海水原位过滤的技术研发和探索,但其结构形式还比较单一,没有实现分时选通的功能,通道比较单一,没有实现多时次过滤取样,国内尚无比测应用先例;且依据其已有的优势,整体偏笨重,主要用在深水海域。 ( _' o/ s& H% s, K
三、深海原位微孔过滤技术
U2 N* P' @# B8 `" | (一)深海原位微孔过滤的必要性
' U) u/ ^, i5 N5 f# ~ R 对于深海微型生物分布模式及生态功能,至今并未形成系统的认知。研究这些深海悬浮物(包括浮游微生物和痕量元素等)的首要条件也是获取一定数量具有原位特性的悬浮颗粒物样本。目前,几乎所有研究都是基于Niskin采水瓶在特定水层采集水样后,在实验室处理获得数据。传统的Niskin采水瓶采样方式会导致对压力和温度敏感的微型生物,尤其是原生动物,在采样过程中出现细胞死亡和破碎等,进而导致低估深海微型生物的丰度和多样性。深海原生动物对细菌的捕食效率研究,也同样受此局限影响,深海样品采集到实验室后,由于压力温度和溶解氧等巨大变化,导致微型生物相关生理活性发生巨变,使得我们无法获知微生物网在深海原位状态下的效率。不稳定的活性分子,如mRNA,也会随着压力和温度等变化,出现降解。鉴于传统的Niskin采水方式对研究的影响,唯有开发原位采样和处理技术才可以最小化深海微型生物多样性和生态作用研究的偏好性。美国伍兹霍尔研究所的学者2016年尝试开展了深海原位培养的摄食实验,获得了较常规采样更为精准的数据,为理解深海生态系统提供了更为准确的数据支撑。为更加准确地理解深海生态系统以及深海微型生物的生态功能,亟待开发和应用原位精准样品采集和处理平台。
: Y4 H* t. Z; q/ ^' Y8 n% B. Z 并且,大洋中大部分水域悬浮颗粒物或浮游生物群落或微生物的浓度较低,为了开展其研究,有时候需要采水数百升到1000L,而在大洋深处开展研究可能需要采集更多的水体样本,甚至达到4000L。传统的方法主要是使用深海采水器进行采水,上船到实验室过滤后获取样品。但取样瓶的容量有限,难以获得足够数量的样品以及完全的生物群落组合。也就是说,以往的采样得到的样本很难满足快速发展的海洋生物学、地球科学、环境科学及海洋资源研究的样本需求。有时候为了研究深海某个站位的悬浮颗粒物或海洋浮游微生物的情况,需要多次进行深水取样,而单次深海取水就需要数个小时,这样就大大延长了科考船时。而大洋科考船每小时费用近万元,同时深海采水器采水又需要多人协作,并且在船上实验室过滤也非常费时,这就极大的浪费了人力和财力。所以,针对深海悬浮颗粒物研究中获取样品的要求,需要研究发展一种简洁、高效和通用性强的新型取样方法与技术。 , |3 D& r1 ]" O
(二)基于船载绞车的深海海水原位微孔过滤系统
' {: \' i0 s2 T, j' P B 现在,深海原位微孔过滤已成为传统方法的有益补充。20世纪80年代开始,国外就已开始研发深海原位微孔过滤技术,美国的伍兹霍尔海洋研究所进行了深海原位过滤技术研究,研发深海直流泵。德克萨斯农工大学海洋科学系的Baskaran等在研究墨西哥湾海水中钍、铅、镭同位素的含量时,就采用了原位提取方法,并且分6层同步采样;加利福尼亚大学地球与行星科学系的Bishop等进行大洋取样时,在0~900m的深度范围内分12层同步进行原位微孔过滤。此种取样方法省时省力,可在海洋研究和海洋开发等方面发挥重要作用,即可为海洋生物基因、海洋环境和基础地质研究等提供一种简约有效的取样方法与技术。 7 z# \" y* E7 I. e
近几年,国内才开展深海原位微孔过滤技术研发,中国科学院海洋研究所研制的系统可安装3层滤膜进行分级过滤。该系统是具有单套过滤装置独立自容工作的样机(如图3所示),系统由总成深海泵模块、过滤模块、采集通讯控制模块和辅助模块(支撑架体、电源、密封舱体、连接管路等)等构成。其工作原理是:将整套装置下放到预定深度,启动总成深海泵工作,将海水经初级过滤器后,通过过滤装置中的滤膜(滤膜孔径最小一般为0.22μm),相应尺寸范围内的悬浮物就富集在相应滤膜上,装置提升至甲板后,取出滤膜,即可获得样品。 + J4 g8 D- v1 Q" p; g; ]1 Y$ t4 ]
 注:CTD指水温、盐度和深度;DO指溶解氧浓度 注:CTD指水温、盐度和深度;DO指溶解氧浓度
* e( U3 R2 T+ @ S$ x
图3 深海原位微孔过滤装置结构与原理图
& i' a Q' u3 z* J6 _8 N4 Z 此装置部分地改进了国外装置的缺点:增大了滤膜面积(直径为200mm),对滤膜堵塞有所改善;过滤装置的密封圈改成“T”型满槽式,取换滤膜时不会脱落,已在海上开展了多次测试应用,如在卡洛琳海山海域,使用深海原位微孔过滤装置获得的样品经过分析,与使用采水器取水到甲板进行过滤的传统方法相比,原位抽滤可获得更多的物种。并且随深度增加,原位抽滤所获得的物种相比较更多,凸显了原位过滤取样的优势。前期测试应用是将其绑缚到船载绞车上,由船载绞车预估其下放到某一深度进行高通量海水采集及分级过滤,可在船载绞车的缆系上分层敷设多个原位微孔过滤取样器,来同步获取多层(如水下100m、水下1000m、水下2000m等)足够数量的深海悬浮颗粒或浮游微生物样本(图4)。 ! v$ H2 V5 U* K+ J, [( V6 t
原位抽滤方法有效覆盖了受压变化易裂解的微生物类群,降低了海洋水体样品在抽滤过程对群落结构的有偏好影响。原位抽滤技术对还原深海微生物的真实群落结构具有重要意义。采样深度越深,传统方法造成的损耗越大;并且这种损耗是有偏好的,会导致近50%的微生物种类缺失。 9 R6 v( r2 {: _1 f) v8 ~6 d
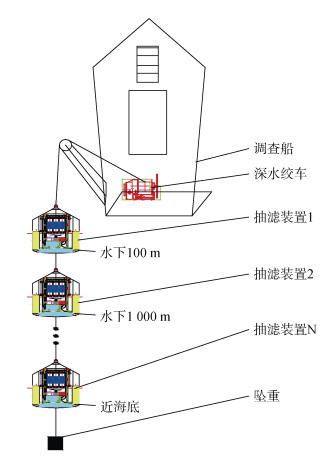
: Y) r+ \- B d" y+ p1 K 图4深海原位过滤垂直剖面多层同步实施方案图 1 j( k7 K; R2 J- g
基于船载绞车的深海海水原位微孔过滤系统,由于是自容工作,受海流等作用,其采样位置很难精准确定;尤其是对近海底的冷泉和热液羽流等深海研究的热点区域无法实现精准定位和原位取样,更没有办法对这些感兴趣的研究区域分时间或空间梯度进行原位采样及过滤,无法对这些区域的微生物等生态环境开展精细化研究。
) E$ Q) J) V# t2 m& S (三)基于水下机器人(ROV)平台的深海原位微孔过滤技术" c5 E! [3 U7 V4 q( p; K' h
上述原位抽滤采样应用基本都是围绕CTD绞车或地质绞车开展的,即在CTD采水架上固定此单通道海水采样及分级过滤装置,或者绑缚在绞车缆线的不同位置上,由绞车释放缆线,预估采样深度,事先设置启动时间和采样时间间隔,进行盲采。无法实现精确位置的采样,无法对特点鲜明的海洋取样区(如冷泉或热液喷口)进行精细化取样(按多个时次或采样地点错落分梯度取样)。
6 A4 [2 E1 b* t8 h! P/ ~ 国内外有关深海原位微孔过滤很少有实现精准定位、分梯度多滤膜原位采样的,而基于深海ROV平台的原位过滤取样是可行的方法之一。目前,只有美国伍兹霍尔海洋研究所研制了基于ROV的原位过滤取样设备,但也没有实现高通量采样。
0 K' H5 I: C* T) \2 a3 h4 T 近几年,中国科学院海洋研究所探索基于深海原位微孔分时空梯度取样过滤技术和原位精准取样过滤技术的结合,装置(图5)自身改造后,可以实现深海原位分时空梯度取样过滤,搭载深海ROV平台可以实现精准取样过滤技术,将二者进行结合,可以实现一次下潜,在船上ROV操控实验室内,人为监测和操控下,对感兴趣海区分时空梯度的精准取样过滤,一次获取多个连续样品,有利于开展海洋科学研究,发现海洋中新的现象和资源等,同时,其分时次原位过滤技术也可以应用到近海小流量(比如数升的水样过滤量)的原位过滤中,具有广泛的应用价值。 - Y, ]5 u. [" A. O1 Y4 c
基于深海ROV平台的深海原位精准过滤关键技术主要包括:实现一次下放多点(12个点位以上)分时或分区域精准采样和过滤(即可实现时空梯度取样);深海高通量采样及过滤装置与深海ROV平台的结构、电源和通信控制的完整对接;形成基于深海ROV平台的深海原位采样及过滤应用方案。开展此平台装置的深海实践应用,以及在与传统的下潜采水后甲板过滤进行比对测试的基础上,评价其高通量原位精准采样及过滤的性能,并总结形成基于深海ROV平台的深海原位采样及过滤应用方案。
& \9 v4 e6 [2 [) v2 ~7 p) ^: K  图5 基于ROV的海水采样及分级过滤系统 图5 基于ROV的海水采样及分级过滤系统
, X8 h4 g9 m2 R% N5 Y+ |* q
四、结论 K7 U7 `3 g5 v. R& X [
海水悬浮物浓度的测量,无论是传统方法还是现代方法都有一定的不足,目前采用的原位过滤技术较好解决了上述方法存在的问题。 5 H0 k$ M( u u
国内外开展了有关海水原位采样与过滤技术和设备研发的探索,但目前系统结构形式单一,没有分时选通的功能,通道单一,没有实现多时次过滤,国内尚无比测应用先例;且依据其已有的优势,主要用在深水海域,整体偏笨重[WTS-LV尺寸:92cm×60cm×33cm,总重量:51kg;中国科学院海洋研究所研制的深海海水原位采样与分级过滤系统相应设备尺寸:90cm×57cm×26cm,总重量:35kg]。国内外有关深海原位微孔过滤很少有实现精准定位、分梯度多滤膜原位采样的,而基于深海ROV平台的原位过滤取样是可行的方法。 6 K( X O$ \$ Z- e. P, R. F
目前,海水悬浮物原位过滤技术的发展方向是建立全新的海水悬浮物多通道(如26通道)原位过滤装置,建立一种基于海水原位过滤并适用于多种海域的多站位、多水层、多时次海水悬浮颗粒物原位立体取样方法。主要解决以下三个关键技术:实现原位过滤系统的精确测量,解决流量计数、滤膜过流能力与压力损失等因素造成的误差问题;形成立体式、多层、多通道原位过滤装置,解决原位过滤与其他水体环境参数一致的立体式、同步测量问题;建立多种间接观测海水悬浮物浓度方法的校正方案,利用原位过滤方式快速获取测量水体的特征颗粒物,解决间接观测方式校正繁琐的问题。 E+ |2 p) Z& I) c8 `& M
海水悬浮物原位过滤装置可以与垂直立体监测浮标载体相结合,构建一定海域范围内多个站点、每个站点在垂直剖面锚系上悬挂若干个原位取样装置的海水悬浮物原位同步取样系统。能够避免众多水样获取、运输和实验室逐个过滤等繁琐的程序,多点多层同步自动过滤提高效率,以简约的方式实现海水悬浮物的立体同步自动测量。 END
2 t8 `! v5 ~3 c6 i3 \7 Z+ a& X 作者简介 文/陈永国 张涛 刘之葵 陈永华 邹宝平 叶良,分别来自浙江科技学院土木与建筑工程学院、桂林理工大学土木与建筑工程学院、中国科学院海洋研究所。第一作者陈永国,男,1979年出生,山东枣庄人,博士,讲师,主要从事海洋工程地质方面的研究;通信作者刘之葵,男,1968年出生,江西兴国人,博士,教授,博士生导师,主要从事岩土工程及地质工程方面的研究;通信作者陈永华,男,1976年出生,山东枣庄人,博士,研究员,主要从事海洋装备研发与系统集成技术研究。本文为基金项目,国家自然科学基金资助项目(42076194)。文章来自《海洋科学》(2023年第8期),参考文章略。
6 N+ x$ Z' R5 x9 l) T ○ 转载自:溪流之海洋人生  - 青岛海上综合试验场有限公司 -长按扫码 立即关注 ( w: Y& O! S9 f5 {
`) G" b' }) s. P8 Q; |* I
7 U4 z5 q: }8 c% s! X% d
3 Q; q5 M" v. N1 f* a
4 X9 O% d' {/ I7 R4 ` - 青岛海上综合试验场有限公司 -长按扫码 立即关注 ( w: Y& O! S9 f5 {
`) G" b' }) s. P8 Q; |* I
7 U4 z5 q: }8 c% s! X% d
3 Q; q5 M" v. N1 f* a
4 X9 O% d' {/ I7 R4 ` | 

