  , u2 r e! j, z5 ^, d& y/ M. @
, u2 r e! j, z5 ^, d& y/ M. @ 多波束勘测技术在河库动态 * c1 d) d0 S: L* Z1 ^
监测中应用研究 --南沟门水库
4 T) u4 v: Z# @- P, K" M/ \ 汛期前水下地形测绘 - V& o7 S0 R- V1 i% F1 |
不忘初心
* S& ^/ `+ ~. R+ w 砥砺前行  ; ~9 {8 a" Y7 K, b9 T1 @3 B+ l: B5 V ; ~9 {8 a" Y7 K, b9 T1 @3 B+ l: B5 V
前 言 7 N& k, r' T# N! L
利用无人船搭载多波束探测系统高精度、大范围、全覆盖、不留死角的对我省实施河(湖)长制的主要河流、水库进行水下地形及构筑物动态监测,提升水下监测的机动性和准确率,保证河湖水库管理者准确掌握水底形态及其变化情况,降低河湖水库巡河中的安全隐患,提高水域水资源管理,助力各级河湖水库智能信息化管理,服务河湖水库决策,为其他江河水库地下测绘项目探索方法、积累经验,为后续规模化开展水下地形测绘工作奠定技术基础。 # u2 K- G+ N3 X' w/ n
测区概况 , t# v3 o* J A
南沟门水库位于陕西省延安市黄陵县南门沟水库,处于葫芦河河口上游,距离黄陵县城区约25公里,为Ⅱ等大型水库,建成功能主要用于水资源保护,防洪,发电,灌溉,水土保持,满足周边县居民生活用水以及工业用水的供水需求,发展生态旅游等。水库大坝总长504.43米,坝顶宽度10米,测得大坝最大水深36米,水库水深范围为3m-37m,水库设计库容为2.006亿立方米。  7 d. e; J" D# z J: S) s 7 d. e; J" D# z J: S) s
施测方案
6 @- _2 G7 k: q q/ v2 z0 m 南沟门水库水下测量设备采用智能导航定位无人船(云洲)搭载多波束测深系统(海卓MS400P)以及ADCP(声学多普勒流速剖面仪)设备进行水下水体地形一体化测量,具体测量流程如下:
7 I4 L4 b3 D: j& g: y 01  + ]* B1 G8 \ g( T% B" f
+ ]* B1 G8 \ g( T% B" f 现场水库地形踏勘   ; |1 B4 _* [% P$ g$ H2 K
; |1 B4 _* [% P$ g$ H2 K 02
( ^. f" \: P! F# C. `1 s9 x; v$ b 无人船及多波束设备安装检查调试
3 r% v( ~, [) t 波速开角143°、最大ping率设置为18HZ、浅门限0.1m、深门限46.9m、波束数目为512条、波束模式为等距模式、HDOP(卫星水平精度因子)1.3  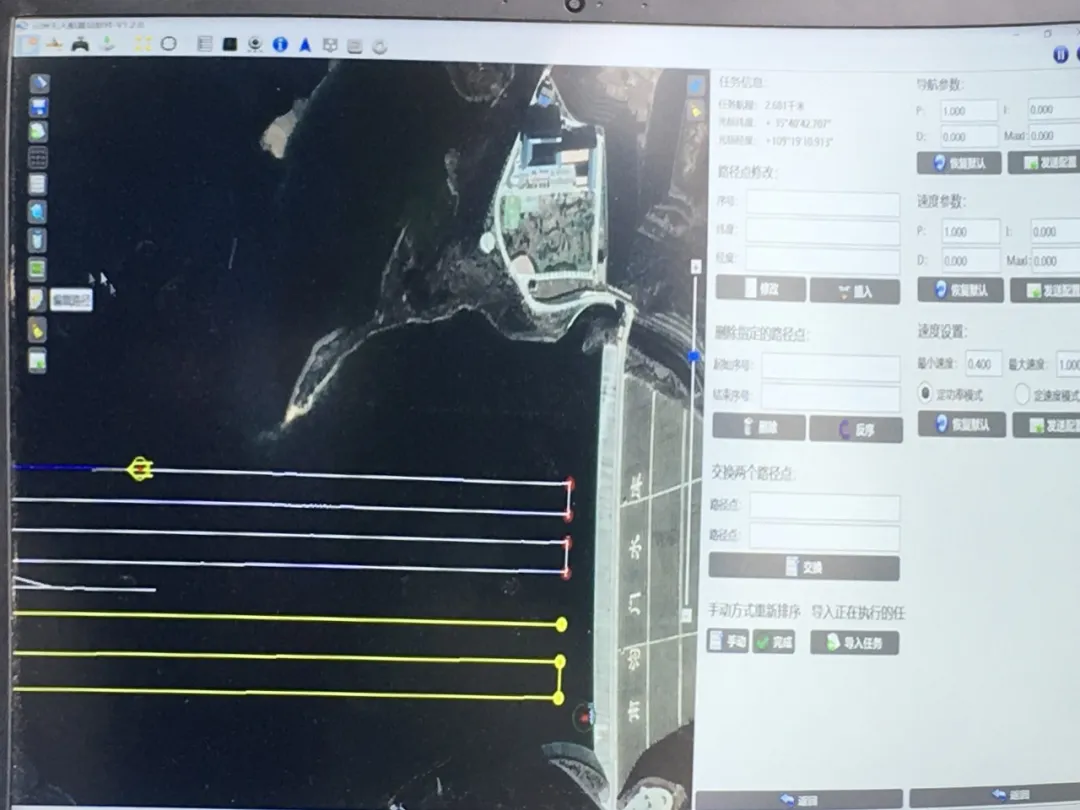 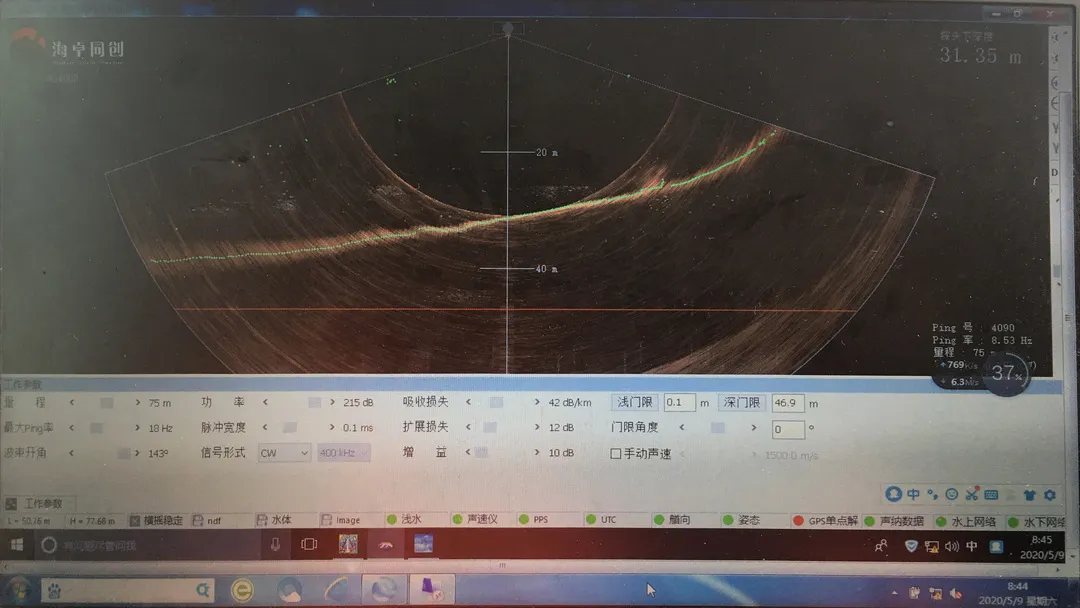  匠心 匠心 + C( ~. [6 V. ? f) E1 o + C( ~. [6 V. ? f) E1 o
03
0 ~- b/ G3 } N: i( D- T 声速设置
1 _2 ~; }. U$ \7 s9 d! Y$ N4 Q& [9 V 为保证多波束系统声线追踪准确,我们采用ADCP(声学多普勒流速剖面仪)对水库内不同时间段和不同深度的水下声速数据进行采样,对HydroNavi软件中声速进行修改设置   + x+ U- n: R% J8 E' H+ ? + x+ U- n: R% J8 E' H+ ?
因为专业 所以敬业  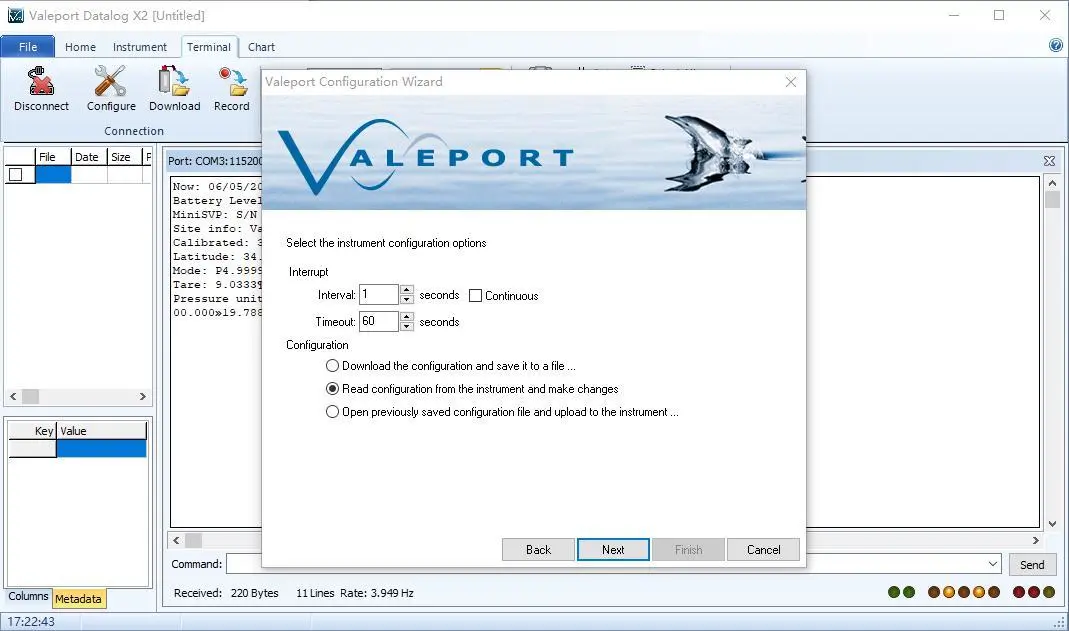  + a( s7 G& x, X* A( B4 A + a( s7 G& x, X* A( B4 A
04 & A1 H4 z# u+ { `2 ?8 o
内业数据处理 & \( k+ X/ k" I$ q
将采集数据交付内业进行HSX数据转换、使用海卓Hypack软件将HSX数据导入新建工程进行滤波处理、点云数据拼接  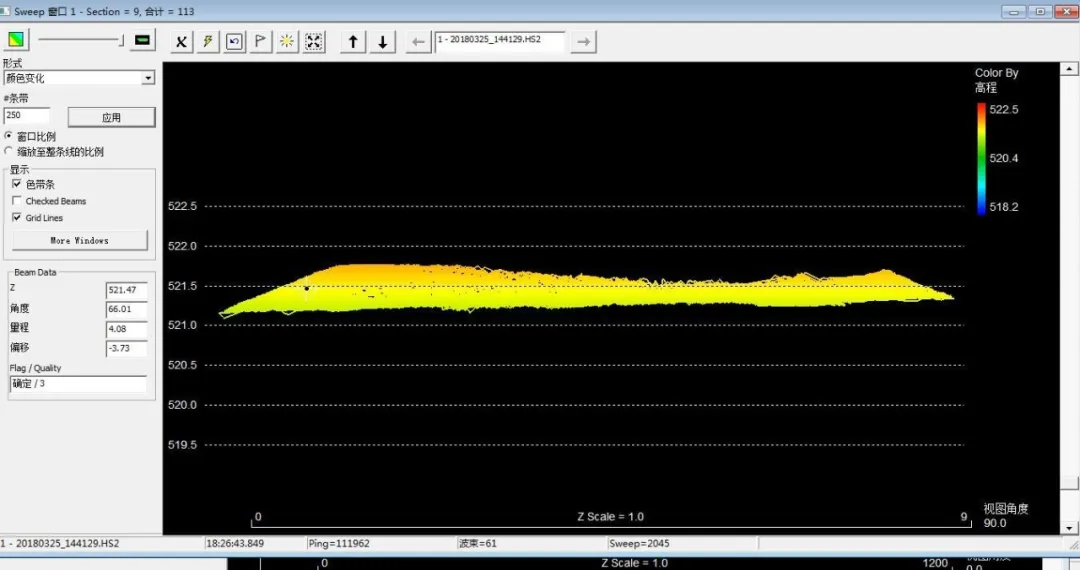 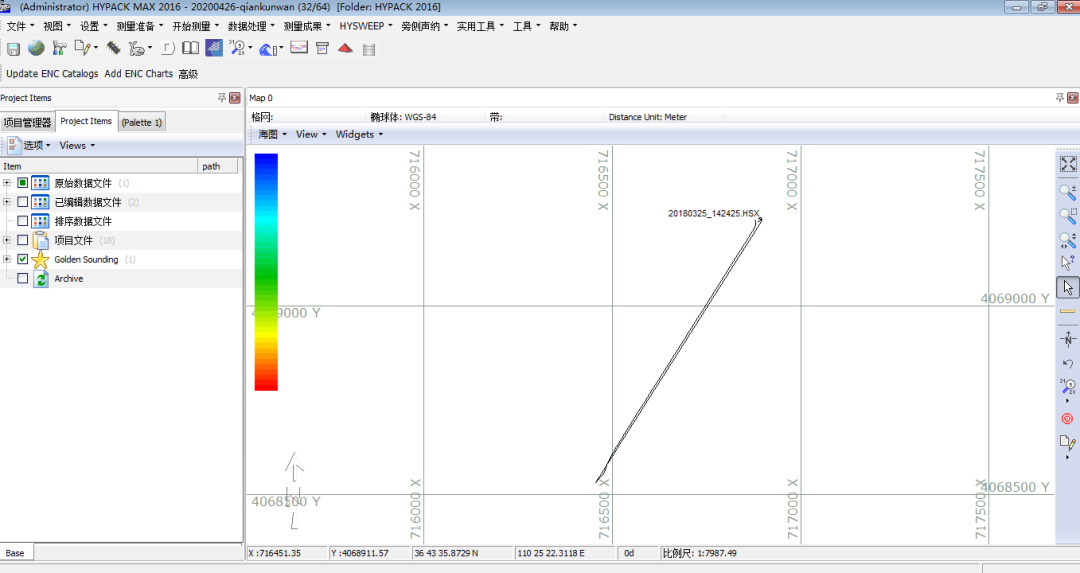 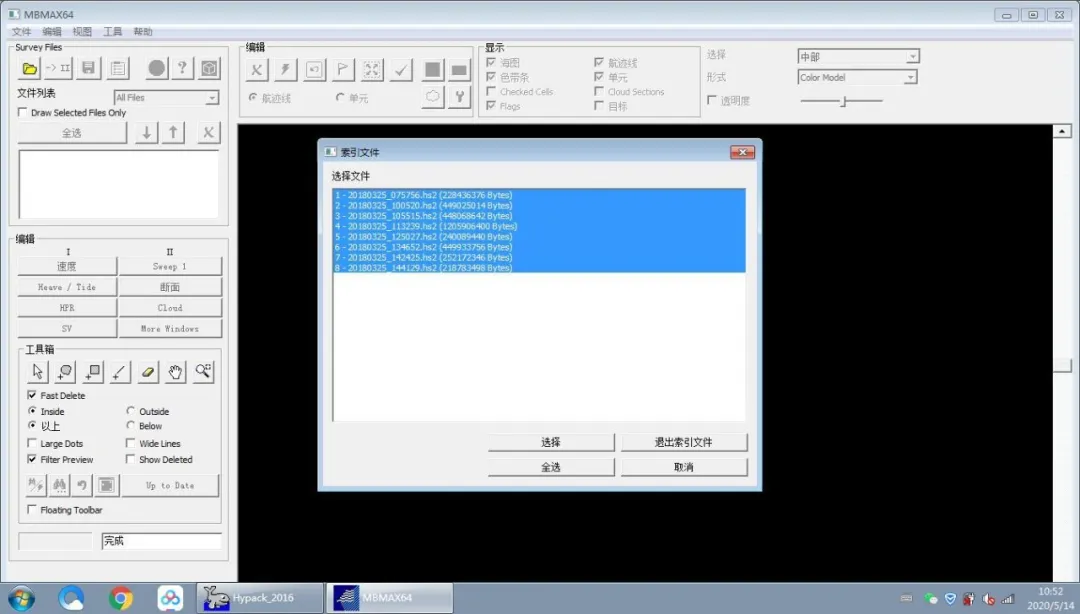 ! t3 P% O. b6 j9 I0 c. m+ ^
! t3 P% O. b6 j9 I0 c. m+ ^ 最终模型数据成果展示 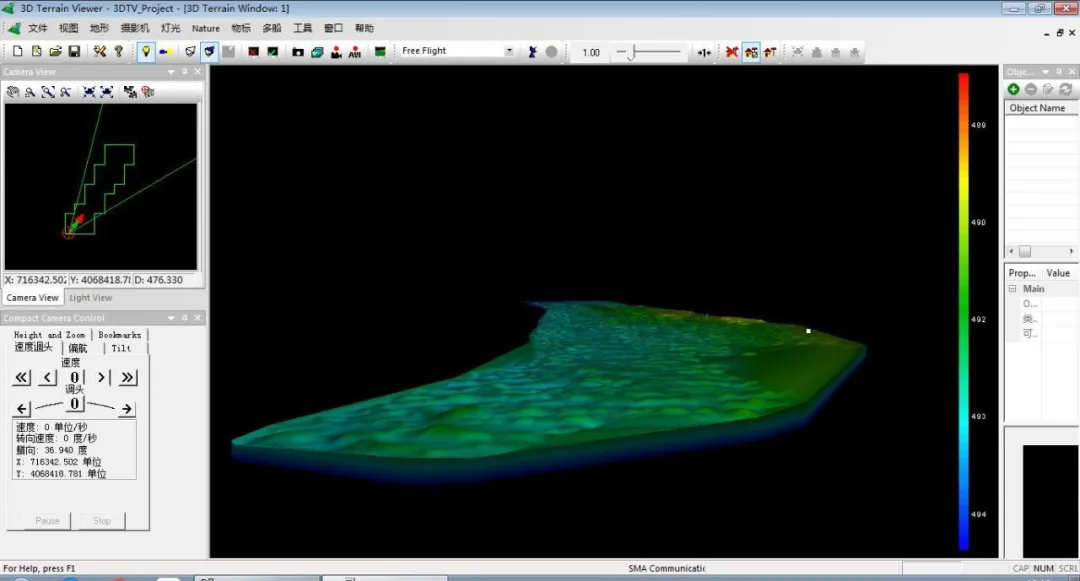  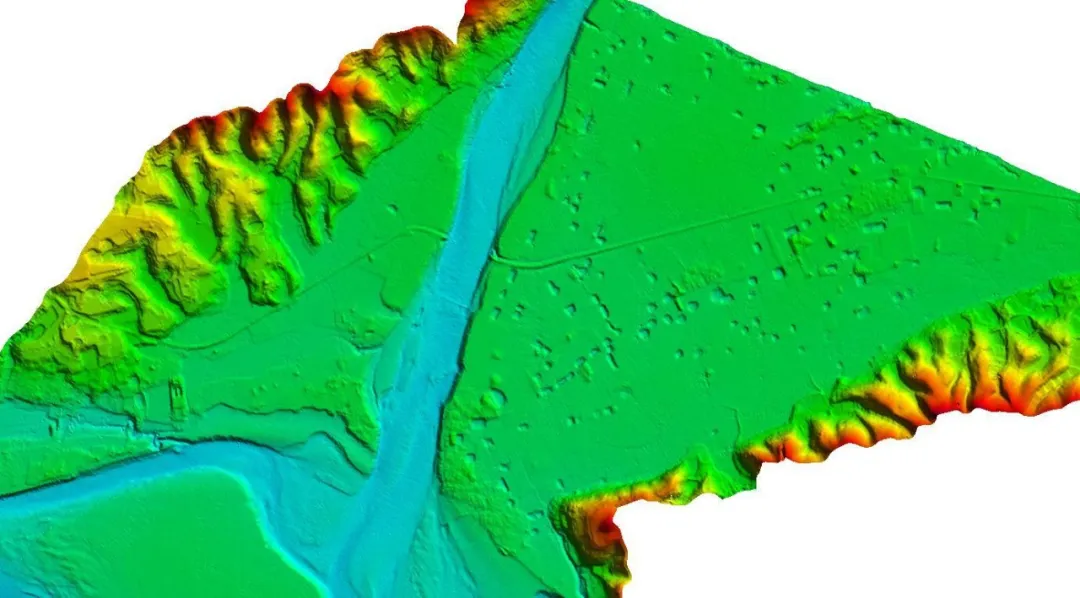 0 z+ a, n3 R, ^ 0 z+ a, n3 R, ^
结语
# m! w( O! x* l3 L7 C6 g 本次对南沟门水库水下地形地貌探测技术进行研究与应用,特别围绕浅水多波束测深声呐技术参数如何设置、测量精度如何保证以及浅水区水下地形地貌测量技术如何应用等,为其他江河水库地下测绘项目探索方法、积累经验,同时为后续规模化开展水下地形测绘工作奠定技术基础。
+ T5 q" i, ]9 x+ \ 智能导航定位无人船(云洲)搭载多波束测深系统(海卓MS400P)设备在水库(浅水)地形地貌测绘中的应用,快速和精准获取水下地形地貌特征信息,为项目后期科学有效规划提供坚实的可视化数字化信息化基础。   9 I6 ?- ?/ ^( Y& Z) w) p 9 I6 ?- ?/ ^( Y& Z) w) p
新模板还没好,设计尸在正在补脑...
8 c1 l4 r# r) N: u* m E N D    ; E$ f+ f3 p' [. w# B1 x
; E$ f+ f3 p' [. w# B1 x 点击蓝字  , G5 E' v o7 {9 D; h- B& W
, G5 E' v o7 {9 D; h- B& W 关注我们
7 d8 F4 v, n0 n8 X4 \, I, M( I p5 D& p
" P# ?4 h$ ], E3 J* A/ `
) F5 E! H: } f' [& s
4 F# h2 Z. w7 k& |3 d4 y" X | 

