|
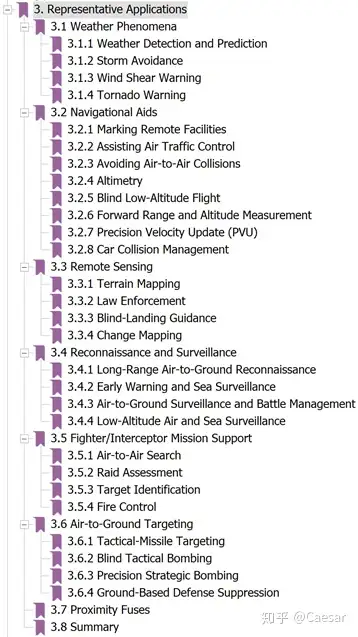
- t: g4 D# A/ M" X/ Q 今天讲第一篇的第3章。建议大家从“雷达导论 引言”开始看起,比较有连贯性。第3章的纲目如下图所示。
7 b8 b( w6 D+ r
) {1 [( z. t2 C; r4 ^ 3. 典型应用 3 v: d6 ]* S' Y2 g# E9 g
3.1 气象 ' s: T( z: ]5 R- n5 Q" c+ @% q; I
3.1.1 天气探测与预报 + ^$ r# C) E5 s, A4 H* M
3.1.2 雷暴规避 ( q5 w* d. O2 L7 [- @$ r9 Q0 O
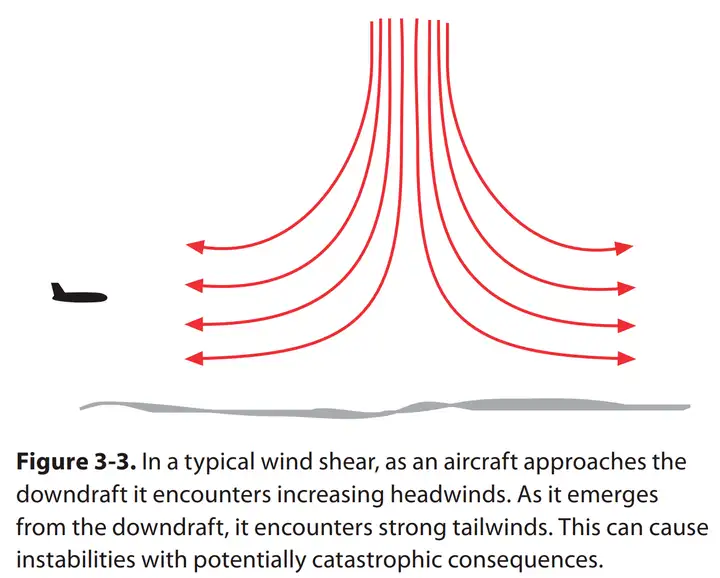
3.1.3 风切变预警
- \& X; V3 |1 C. H' y9 T 3.1.4 台风预警
7 L0 {( l1 D( B* f 3.2 导航辅助
4 P+ K% ?/ S1 N& d 3.2.1 标记远方设施
. F( O, ^5 h. q 3.2.2 辅助航空管制 9 U1 v1 I( U; p: M: S
3.2.3 避免空中碰撞 5 Y; p1 y1 B _5 |' ?1 x
3.2.4 测量海拔高度
/ ~2 W9 h! x0 S( Y 3.2.5 低空盲飞
6 D! a, ?% c6 [ 3.2.6 目标前视距离与高度的测量 # e, z S/ M }" n7 F- X
3.2.7 精确速度修正 & _3 t! P- B! H7 C: H; X0 \' z
3.2.8 汽车碰撞管理
+ R: o' @5 b; Y; R, Z$ w 3.3 遥感 ( _; I( C* k' h2 \
3.3.1 地形测绘
# p7 [ D) J9 ~3 f% Y 3.3.2 辅助执法 % n/ n; i* Q' E! Q
3.3.3 盲降引导
' `: ?& k/ e# e: Y1 {- }6 F# W* l 3.3.4 变迁测绘
. k S: O, k( a7 J# i8 s! F( E 3.4 侦察与监视 " g! Q! ~/ p' u/ Z' [! B" d
3.4.1 远距离空地侦察
* ]$ |9 M" o9 `( H2 M5 ^ 3.4.2 预警与海洋监视
1 a1 m/ r; V3 N) C, k c0 ~ 3.4.3 空对地监视与作战管理
$ T& `3 Y9 r- G2 H, g 3.4.4 低空海洋监视 - i, x5 j3 D) a) h! B% ?4 C
3.5 战斗机/拦截机任务支援
& t+ G, w& ?# h3 H, Y 3.5.1 空对空搜索 " v9 e; X& {) ^& P1 y9 [
3.5.2 袭击评估 1 P1 C- r5 S) m1 O
3.5.3 目标辨识 . D& i+ K& w3 \! i9 u) D
3.5.4 火力控制 " o! b$ Y9 Y, Q; n6 {7 C
3.6 空地目标瞄准 - \- ~2 s( \* Q1 k" s+ I4 \4 k- X
3.6.1 战术导弹瞄准
: u' |& i( t; W' t7 [ 3.6.2 盲目战术轰炸
9 w* G3 F7 s6 U. H% O- D X 3.6.3 精确战略轰炸 3 [3 S f0 v( `4 P$ t4 |
3.6.4 压制陆基防御
3 {7 H5 y# N8 u* c 3.7 近炸引信
0 z2 C' M1 `) s+ U2 e/ j+ F1 E2 z 3.8 总结 2 G" N) [ ?5 f9 N& ~4 Y+ a
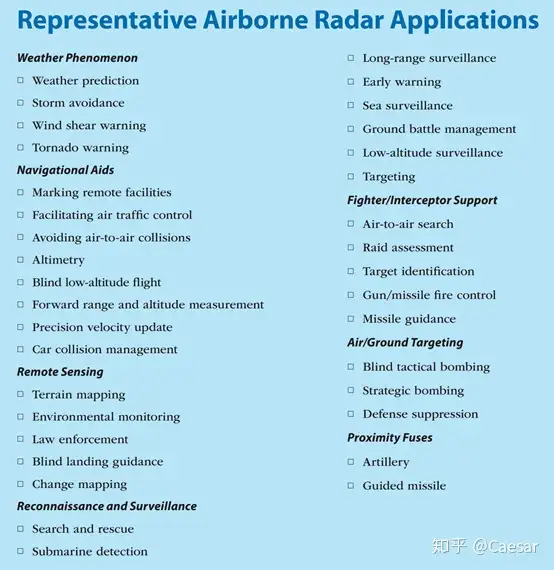
这一章主要讲雷达的几个主要应用场景,大家了解下即可。这里附上一张原书中的表格,很好地总结了机载雷达的应用。 # g K+ M" S4 S# V `# ]& y
; g" i( t6 y/ S& N' a3 t 原书给出的扩展阅读: " t+ ~% q4 m7 c; O- b$ X: _( F
7 u' n- b& [/ i$ k& l2 t) N7 A 进入章末的问题环节: - B2 L$ v6 Q/ C% |3 n0 n
简述脉冲多普勒雷达的10种典型应用。答:1)风切变预警。通过测量水平风的变化率,雷达可以探测到远在前方8公里处的雨中嵌入的风切变,给飞行员10秒左右的预警时间来采取规避行动。;
6 B! H4 ~) I/ i: Z8 m
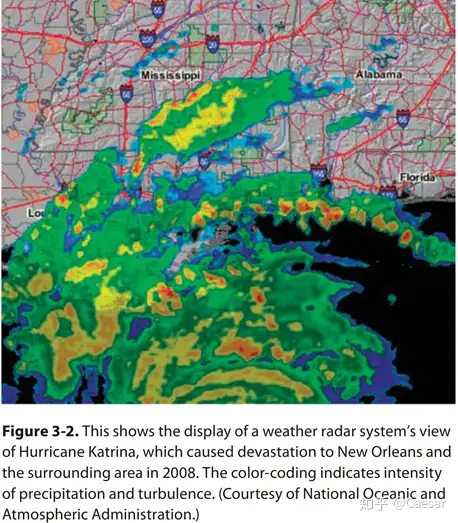
( Q# z2 W6 w) i2 x 2)台风预警,下图为飓风Katrina的气象雷达图;
h- w6 _( } z6 Y 8 x: k1 [+ Y9 Z
3)精确速度修正(PVU)。前视雷达通过测量地面三点回波的多普勒频率,可以确定雷达的速度。这些测量数据可以用来更新飞机的惯性导航系统。如果惯性系统失灵,雷达可以接管。以这种方式工作的雷达系统称为多普勒导航仪; - z8 |8 q$ b/ M% B! w, W! @9 d$ k/ r
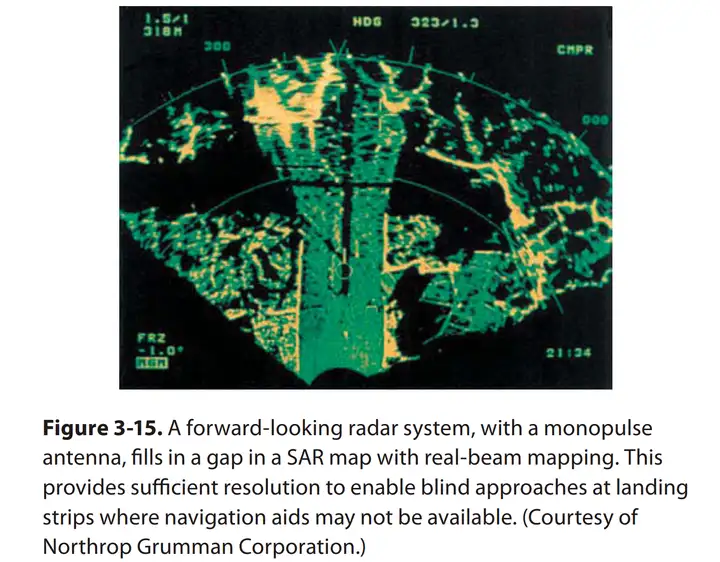
4)盲降引导。这里使用了多普勒波束锐化技术; 1 s8 M( X. k0 R8 m
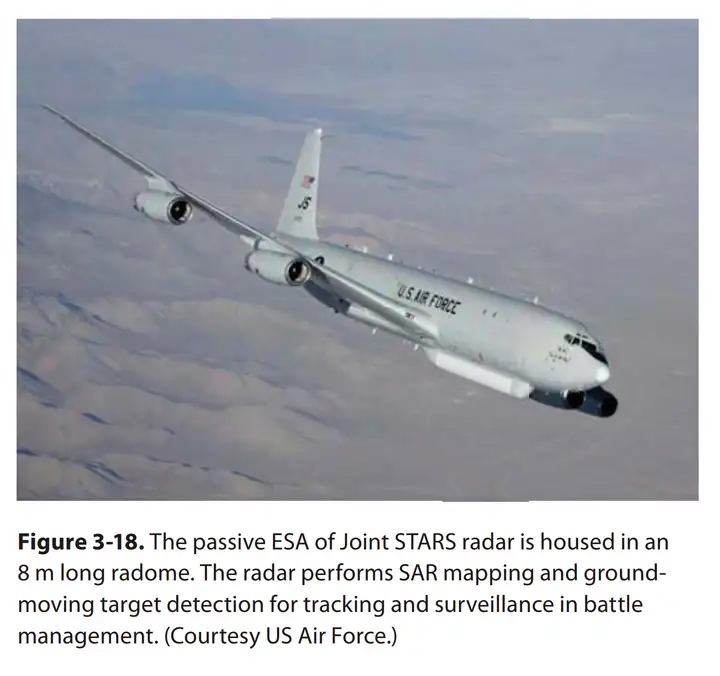
* Q. ^) a2 [/ u6 z3 D 5)空对地监视和作战管理。空中预警机提供对广阔空域的监视,机载雷达也可以提供对地面大片区域的监视。这些雷达结合了高分辨率成像和探测地面移动目标的能力。利用单脉冲对运动目标的定位更加精确,研究表明,位移相位中心天线(DPCA)和时空自适应处理(STAP)等先进技术可以使目标在杂波背景下更容易检测。这种系统的例子包括JSTARS、SENTINEL和AN/ AP-12。JSTARS装备有一个长时间的电子操纵侧视天线(图3-18),通过移动目标指示(MTD)探测和跟踪地面上的移动目标,并通过SAR探测固定目标。 7 R; M3 w4 O5 y% d+ w% {
7 n. ?3 m* }" G7 O1 x 6)袭击评估。即使雷达的光束很窄,但在长射程范围内,它也不能分辨出正在接近的飞机的密集编队。因此,战斗机的雷达通常提供一个袭击评估模式。这可能需要雷达在扫描时交替跟踪以保持态势感知和可疑多目标的单目标跟踪模式,提供非常好的距离和多普勒分辨率; 6 {5 ^" X. n# Q% f2 f. k0 F: I
7)空对空搜索,如F-16战机; $ ^9 D g* G: t; `" ~8 I
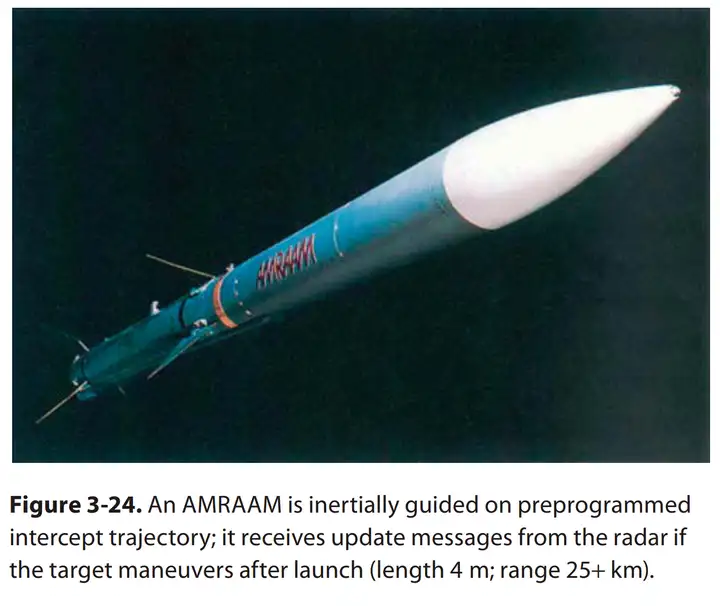
: K" Q% j) _6 y# H 8)导弹的主动雷达导引头。通过惯导设备、GPS和主动雷达导引头使得导弹可以自主飞向目标,并搜索捕获跟踪目标,实现发射后不管。主动雷达导引头广泛使用了脉冲多普勒雷达,实现精确末制导。
% i2 m1 b" C& G* @/ R 3 f/ ]* O9 L G% J& @2 u
9)地基雷达或舰载雷达。使用脉冲多普勒雷达进行防空和火控,获得敌机的位置和速度信息。 + o: m5 e' _- F) H+ F1 `
10)近炸引信。导弹使用了更精密的引信。它们不仅能够探测到目标的存在,而且能够通过测量导弹接近目标时雷达回波的多普勒频率的变化来控制引爆的时间。
5 ^# ~! f& G0 R$ _ 2. 什么天气现象可以用雷达探测和测量? ( K h7 d: q8 _. i+ ^
答:见3.1节的子标题。
! Q2 o; K9 N0 x7 ~- \ 3. ADS-B等系统与空中交通管制雷达有何不同? * q3 E' j5 ?! Q+ ?1 t8 Y h4 Z
答:先解释下ADS-B,其全称为Automatic Dependent Surveillance-Broadcast System,意为自动相关监视广播系统。 : I: b: B# e4 C; ~$ {* h6 `
这个问题原书中没有作详细解答,这里给出一个链接,感兴趣的可以去看看。 " B4 P9 }4 D' |+ t) C! ^
http://www.360doc.com/content/19/0618/13/64794380_843288442.shtml - @, h6 ?+ E0 U/ Q% T: F" E/ U& y! k# a
4. 这个术语是什么意思“探测变化"? ' q1 I: L2 E4 X& e( M
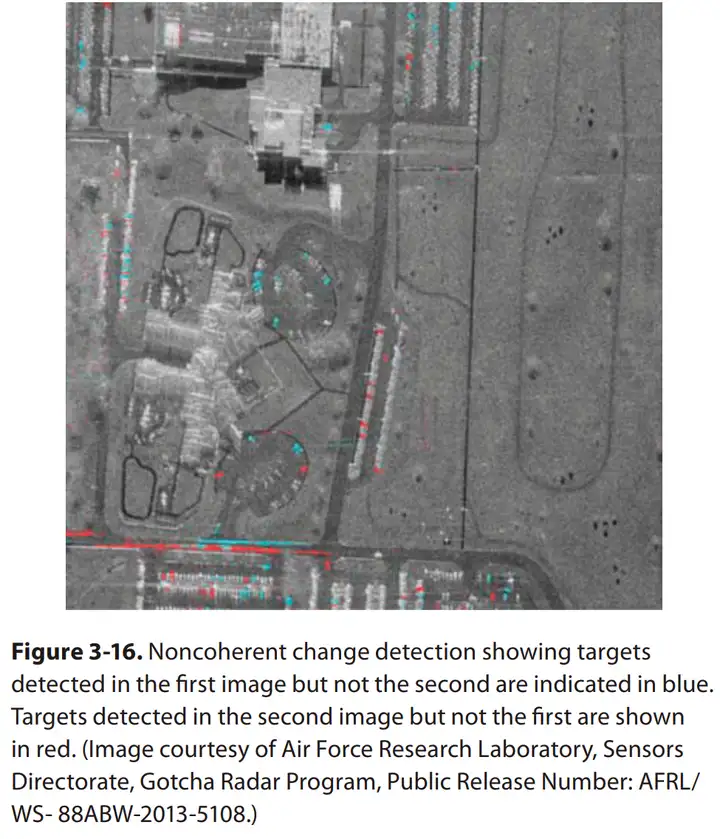
探测随时间和空间的变化。探测变化在许多方面提供了宝贵的信息,如海岸侵蚀、极地冰盖融化和森林砍伐。图3-16提供了一个非相干变化检测的例子,在第一幅图像中检测到目标,但在第二幅图像中检测到的目标是蓝色的。在第二幅图像中检测到的目标,而不是在第一幅图像中检测到的目标,显示为红色。这使得图像分析人员能够对随着时间的推移而发生的变化保持警惕。
% z( s- z8 K2 D" Q$ o ) h% Q$ d2 q0 g" u1 G
5. 使用雷达进行目标识别的优点是什么? 1 X1 Z4 f* G2 o8 l j
答:要说优点,就得有对比。这个问题其实主要是和光学图像里的识别来对比。最主要的优点就是可以超视距识别,可靠,速度快,不易受自然环境影响(如恶劣天气)等。 9 @& H9 i- b1 \# q: s9 y5 W, s
雷达的目标识别分为三种。第一种就是最简单的敌我识别(IFF)。一个与战斗机的雷达同步的敌我识别(IFF)间传送器传送“发射脉冲”,所有友军飞机上的应答器都对此进行编码应答。 , e* f% Q# \ ~ e
第二种为一维距离像的识别。如果能提供足够好的距离分辨率,目标就可以根据它们的一维距离剖面来确定。敌我识别可以理解为0和1的识别。一维识别可以理解为获得目标特征,对目标进行分类鉴别,比如区分出航空母舰和渔船的轮廓,它只能识别几种有限种类的目标。
2 _! ?' c2 W8 n( Y4 g* M# z + T/ b D( u+ \& Y1 X: E v V
第三种为二维图像识别。通过SAR或ISAR技术,可以提供2D图像。这就与光学图像的识别类似了。但是成像时间较长。 & ~+ L" y4 L I1 C) w# I) n
本期内容到此结束。“第一篇-概述”全部讲完了,下期将开始新的一篇。 ! _! S8 X8 k" a8 D+ q, @6 R+ r T
1 J1 i6 b- s! W: O: T/ C/ P, }1 C" O, ~6 @9 v
) T. Z0 @7 a; f3 Q, p/ N
$ J/ D- y0 A- c3 o% |3 X" @, t( T |