|
B _! v) ~, k4 @: L3 ]
在风电工程中,测风是规划设计前期工作中的重要一环,测风数据的精确性和完整性将直接影响整个风电场的设计,包括风机选型、抗风设计、风场分布、风功率预测等。随着技术的迭代更新,以及海上风电往更远更深的海域发展需求,漂浮式激光雷达测风系统正快速取代海上固定式测风塔的市场份额。 * {1 n- \( H5 b0 ]% M) o( C* t. r
! v( p/ h1 x9 _7 z
伴随着风电应用场景的拓展,海上风电环境对原本适用于陆上风电的传统固定式测风技术路线提出了挑战。 $ `, `( _' Y; a* X
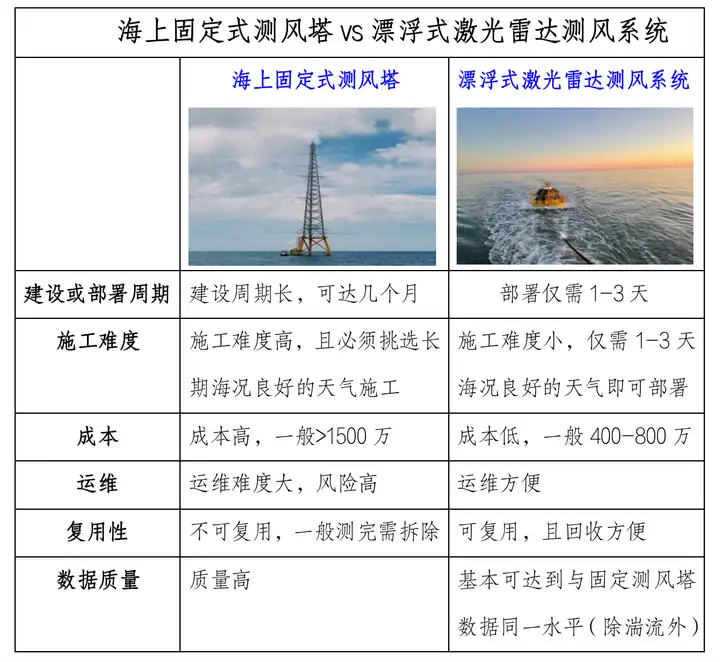
一、海上固定式测风塔vs漂浮式激光雷达测风系统
: c/ I0 a8 s: n1 r; g
! R4 P* k1 D. R) r* e' d9 K 二、漂浮式激光雷达系统介绍
: P- m8 i0 N3 O* y3 n' M9 O$ I (1)系统简介+ B/ b8 [- \; M" u; {, T
海上漂浮式激光雷达测风系统,一般主要由测风激光雷达系统、常规气象系统、供能系统、远程通信模块和浮标系统等五大部分组成,其中激光测风雷达是风场测量的关键核心设备,浮标用于保证激光测风雷达在海上的安全稳定运行。 $ q$ k8 e8 Q z5 k! i. [0 I
系统可实现同步观测风、浪、流、水深、气温、湿度、气压等要素,通过卫星随时监控系统状态并传输观测数据,可实时接收观测数据、监测系统工作状态并及时开展运维工作,保障设备在长期观测过程中稳定运行及获得较高的数据采集完整率。
% Q% s4 d/ _0 I0 V 7 g8 R1 ^ r) u7 X0 G: }
(2)工作原理
% [' u. i+ o' h( C* D 1、激光测风雷达探测原理
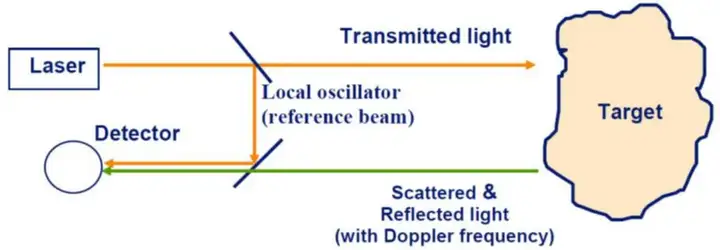
% c# u0 B" u( q7 M8 g/ t 在保证探测精度方面,市面上主流的激光测风雷达均采用多普勒相干探测技术,即用激光雷达发射激光束到空气中,运动的气溶胶颗粒会使反射波发生多普勒频移现象,再通过激光雷达对反射波进行处理,就可以解析出其中所含的风速与风向信息。激光相干多普勒测风技术是目前精细风场测量的最佳技术途径,目前应用相干探测原理的多普勒测风激光雷达主要分为两种探测模式:连续波相干探测和脉冲相干探测。 ' |; D8 e9 X g
( i$ W7 _ Z' ] e9 g
2、姿态和位移补偿原理 . d+ y/ H6 ^( B
海上风能资源测量准确测量的关键是要保证激光雷达在风场测量时的精确度。由于激光测风雷达在海上随浮标平台运动,激光径向测量位置的偏差、系统本身的运动速度等因素都会在观测到的原始数据中引入误差。为避免激光测风雷达运动引起观测数据的误差,目前国内外漂浮式激光测风雷达均采用实时姿态与速度补偿算法对观测误差进行实时校正。 ' l* ^3 y# w# z& H# I/ C5 }
利用搭载的GNSS和高精度惯导获得实时浮标姿态信息,如浮标位置、移动速度和姿态角等信息,结合激光雷达伺服系统记录的浮标坐标系下的光束扫描俯仰角和方位角,经过坐标系变换矩阵分析,剔除浮标运动引起的径向分量,从而得到真实的径向风速。校正后的径向风速通过风场反演方法,如DBS风场反演方法、VAD风场拟合方法等得到真实的大气风场。 2 Y0 A( Z7 c* b1 E) n
3、浮标平台
; e: Z3 r; j" G1 X5 D 浮标平台为激光测风雷达提供了供电、通信、监控等基本功能。其中供电系统一般由光伏电池板、小型风力发电机、蓄电池、燃料电池等组成,满足激光测风雷达长时间海上运行要求。通信系统方面,由于我国深远海地区一般无移动通讯网络信号覆盖,国内漂浮式激光测风雷达数据通讯一般采用天通卫星或北斗短报文完成数据回传,受民用卫星通讯带宽限制,目前国内市场上一般的漂浮式激光测风雷达实时传回都有丢包的风险,实时传回数据完整率无法达到100%,据悉,目前也有供应商依靠自身开发的软件可实现丢包自动或手动补招,使得数据100%传回,除资源数据外还实现了照片的传输。
- ~4 |. o) L7 M8 o 三、漂浮式激光雷达系统的设计原则
% f4 S- H: m, A 漂浮式激光雷达测风系统能够替代传统固定测风塔的前提条件就是其采集到的风资源数据质量能够达到或超越固定测风塔所采集的数据质量,所以数据的准确性、完整性将显得尤为重要。
$ L9 D# O5 q+ e# f' T# p- y# u (1)准确性原则
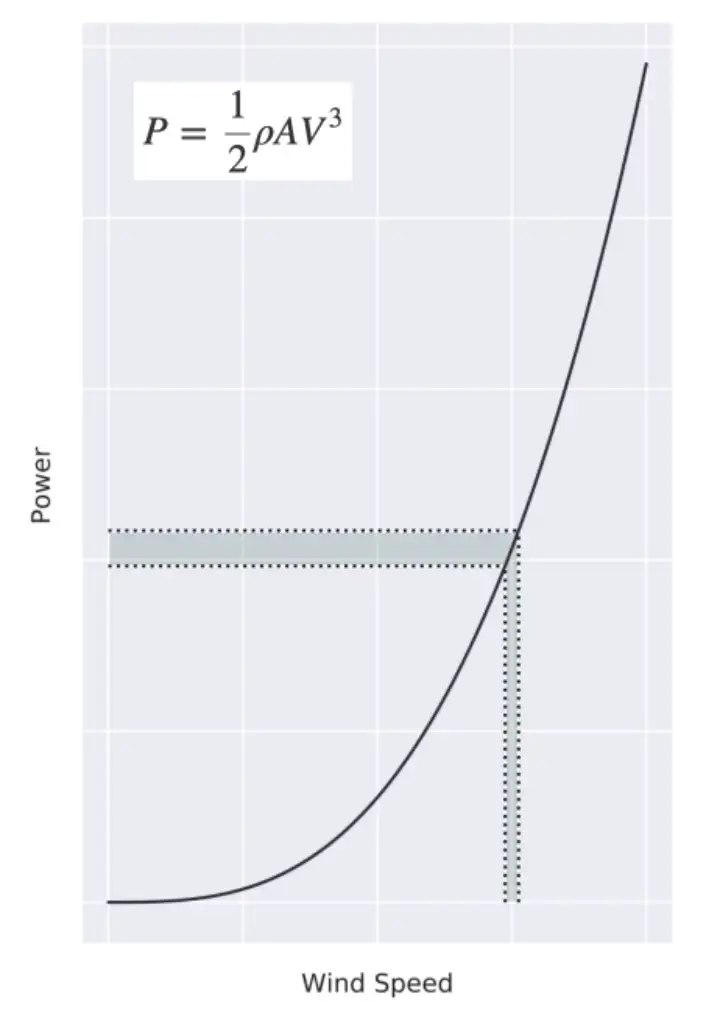
) Y. p f C2 G% z. w. ]3 {! | 采用漂浮式测风设备,虽然可以降低成本,但任何替代旧技术的方法只有达到开发者期望的准确性标准才可行。一般来说,所测风资源数据不确定性降低1%就会导致能源不确定性降低约3%,所以即使是一个微小的偏差也会给开发商及其融资伙伴带来巨大的成本。 6 T6 S0 x0 `3 ~% R0 A" v& G# ]
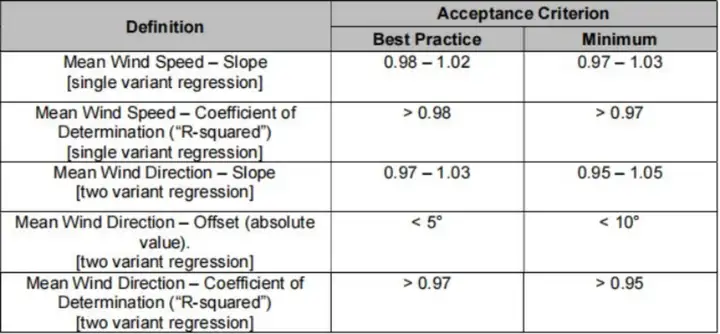
$ j/ C7 ]6 b, \; I" f 为了确保漂浮式激光雷达达到要求标准,供应商通常需要将其投放至一个传统的固定测风塔旁进行对比测风来量化他们的性能。目前在国际相关标准还未颁布的情况下,国际上通常要求漂浮式激光雷达所测数据满足OWA规划图中的最佳实践标准,如下图所示:
4 B: g+ Y9 l3 m 1 Z* J. [* j( f- {
通过精确的运动补偿算法(从采集的数据中消除浮标运动对数据的影响)以及较低浮体重心的结构设计(在99%以上的时间内保持倾斜角度15度以内,确保收集到的原始数据仍然是算法的有效输入)来实现这些结果。
9 D) G1 h/ U8 r0 E( e; p* R- m s( H (2)可靠性原则1 z a% L/ h& x6 O4 \
作为一款需要在海上长期无人值守的设备,收集的数据必须是全年连续的,为了确保数据的有效性和完整性,必须遵循可靠性原则。 + v! R* `# {2 c6 T7 k
采用以下多冗余设计方案,可以大幅提高设备在海上的稳定性和可靠性:
' R+ V; L j9 j0 `+ w ▶️ 双激光雷达,在供能充足的情况下,同时开启两个激光雷达可有效的提高设备的数据完整率。
. \, U( ~8 E) Y5 t* R4 A ▶️ 为所有测量传感器进行冗余备份,包括运动、方向、温度、气压等传感器; # U3 ^/ {9 F0 ?0 @# B" @; t
▶️ 冗余能源供应,包括电池组、燃料电池、太阳能电池板和风力发电机等 0 l+ V6 U: ? \4 ^! E+ j, l$ L& N$ ~
▶️ 现场附近岸上长期准备备件,以便在必要时可以快速更换; : ]8 Q5 O# t( w+ j) T/ W
(3)安全性原则
) z. i7 x2 X% H* _ 当然,除了要确保数据质量,设备的安全性也极其重要,在为期24个月的风资源测量项目中,漂浮式激光雷达测风系统暴露于各种危险中,包括恶劣天气、巨浪以及渔业和其他从事离岸活动船只的碰撞。在难以到达或者出海成本高的远距离项目中,这个问题更为突出。因此,要实现客户期望的数据可用性,需要仔细地做设计决策,以降低风险,并确保测量全年持续稳定进行。一般需要在事故发生前预防事故,并在事故发生时将损害最小化。目前有以下几个措施能保障漂浮式测风设备安全稳定的运行:
) \0 Z, l- Q1 b8 H+ |5 h( F* F ▶️ 船舶自动识别系统(AIS); $ B4 o; l5 J5 S- W
▶️ 雷达反射器; - T- z+ r3 r6 r7 g% [" y; n# C
▶️ 支持安装符合国际航道标志协会(IALA)要求的航标灯;
: l4 ]/ o% Q9 p; I, ? ▶️ 配置保护护栏,以便在意外碰撞时吸收能量并保护系统安全;
: v9 T7 I* k/ s8 T: ` ▶️ 提供本地语言及可见警告信息,提醒附近船设备有监控及其他安全措施;
) B4 \( p* d6 `6 H7 I. y" D+ l. f ▶️ 充沛的剩余净浮力,以确保即使在事故发生后可能进水,系统仍将漂浮,可以更快、更容易地修复和重新部署系统。 : ?' z, \) _" N' F- u' i
四、前景展望
) M$ Q' \- Z, U) b ( P1 b- `7 S- Z0 ~) {" u$ p
未来,漂浮式激光雷达测风设备将朝着追求更精确的湍流数据、再跃升的测量高程、更深远的海域应用的发展目标高歌猛进。
- b4 `" m0 y& b( H (1)更精确的湍流数据
$ k/ U% E' z Z$ H4 |5 u# T- _ 目前国内外漂浮式激光雷达测风系统在平均风速、平均风向、切变指数方面和测风塔已经几无差异,并且不存在塔影干扰。而湍流测量精度和测风塔存在一定差异,一般需要修正。国际上针对漂浮式激光雷达的湍流测量近期研究加速,国内厂家也在积极跟进,相信在不久的将来,湍流数据精度也将达到和测风塔相近水平。 2 ^; G' X8 i+ j: I2 D. R
(2)再跃升的测量高程# D# L& J& z* d0 N
早期固定式激光雷达测量高度在200米以内,随着海上风电机组往大机组发展,叶轮直径将超过250米,将来漂浮式激光雷达测量高度将至少要求300米。如果气象领域实现批量应用,测量高度要求将可能进一步提高 " x5 _2 M. O* h5 d4 f% e
(3)更深远的海域应用 t9 T" l% L6 o0 s' t7 L) l* T: w
目前国际漂浮雷达已经开始应用于150米以上水深,尤其日本、韩国,离岸水深随着距离快速增长,均需在150-300米水深海域进行风资源测量,漂浮式激光雷达测风系统需要针对此类场景进行锚系迭代设计,确保系统安全运行。 $ R5 H+ A, W0 n4 K" _ b4 P
(来源:中国能建江苏院)
* _3 T, U$ ~7 c
% p! _' y# W" H$ h
9 `1 C4 ]. \ ~, w4 M) |9 [
3 t6 T9 q# B R/ d- {- Y/ q
. x9 \! Z1 }' A |