|
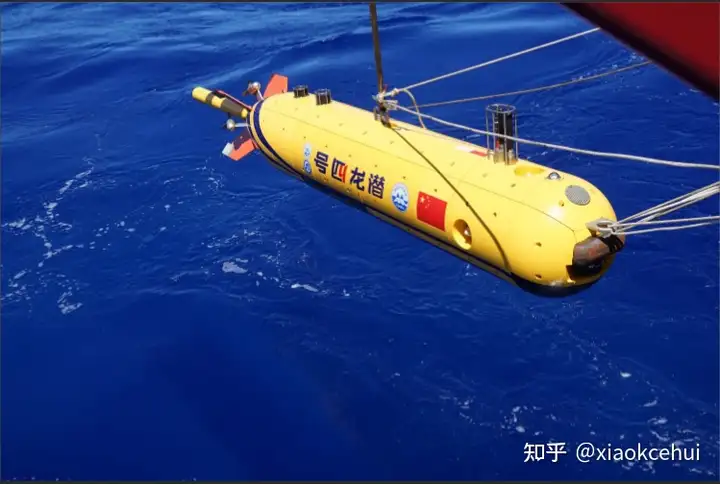
7 m/ k/ a$ d: u# A% U# ^- I “潜龙”系列目前包括“潜龙一号”、“潜龙二 号”、“潜龙三号”和“潜龙四号”。“潜龙一号”是由我国与俄罗斯共同研制的“CR-01”系列改造而成的6000米级无人自治式潜水器,采用回转体形式,可完成海底微地形地貌精细探测、海底水文参数测量和海底多金属结核丰度测定等任务;“潜龙二号”和“潜龙三号”是完全由我国自主研制的4500米级无人自治式潜水器,采用鱼型仿生形式,具有 更 好的运动灵活性和水中状态,并集成海底热液异常探测、海底微地形地貌探测和海底磁力探测等技术。“潜龙四号”是中国大洋协会采购的产品化6000米自主水下机器人,是一款面向用户应用需求的定制化自主水下机器人产品,其主要技术指标较“潜龙一号”有较大幅度提升,可靠性更好。2020年,“潜龙四号”首次执行大洋调查任务。 1 Y, M4 j0 N, C
6 000 m AUV“潜龙一号”浮力调节系统开发及试验研究_武建国2014年 $ D8 n) z& W1 F6 L: ~
为延长水下探测的时间和提高探测安全性,“潜龙一号”采用无动力方式进行下潜和上浮,即下潜和上浮过程不需要螺旋桨推进和控制,而是通过加载下潜压铁和抛除上浮压铁的方式实现快速下潜和上浮。由于航行深度大,下潜和上浮操作过程实施周期长且相对困难,减少航行器下潜配平次数和提高配平质量有着重要的实际意义。 9 b: t% O% G# {" o
一般情况下随着下潜深度的增加,水下航行器浮力会不断的增加。由于大潜深水下航行器组成材料繁多且耐压舱的形式各不相同,以及不同航行水域水文环境的不确定性,精确计算不同航行深度配平量很困难,故需要在试验前针对不同下潜深度进行配平,而在大洋深海环境下,配平过程非常耗时且困难,且一般需要 2~3 次下潜才可以实现预定深度的优化配平。为减少配平次数,针对“潜龙一号”的具体情况设计了一套单向浮力调节系统。
. f" `5 ^$ J5 _, f" _( l
) \" b9 V; ]$ j3 k6 i/ R O7 Y, g Q 浮力调节最先用在海洋潜标系统,用于驱动潜标系统实现海洋剖面的垂直上浮和下潜。再随后,浮力调节系统成功地应用于水下滑翔机上,实现了滑翔机在浮力驱动下的大范围可控航行。
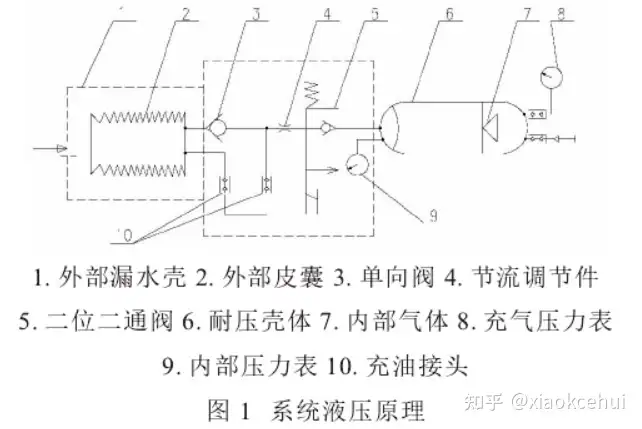
2 S( O) c! Y8 E) V' N; H0 ~ “潜龙一号”浮力调节系统液压原理如下图所示。 " p# y$ l0 R% f# z- c7 B9 y# G T
- D c5 g$ \/ g5 P# t& k 系统以外部海水压力为初始驱动力,当航行器需要在一定深度下减小浮力时,开启二位二通阀,海水压迫外部油囊中的油液经单向阀、节流调节件和二位二通阀流入耐压舱内部皮囊,浮力调节系统整体浮力减小。 ) H7 @: w/ z2 c* R, l% f: g
潜龙二号和潜龙三号 2016年3月22日,4500m级深海资源自主系统“潜龙二号”在西南印度洋实验性应用中表现良好,获得了断桥、龙旂热液区的近海底精细三维地形地貌数据和磁力数据,同时发现了断桥、龙旂热液区多处热液异常点,获得了洋中脊近海底高分辨率照片。: B- W% D; a( s$ d- J8 G. \6 v
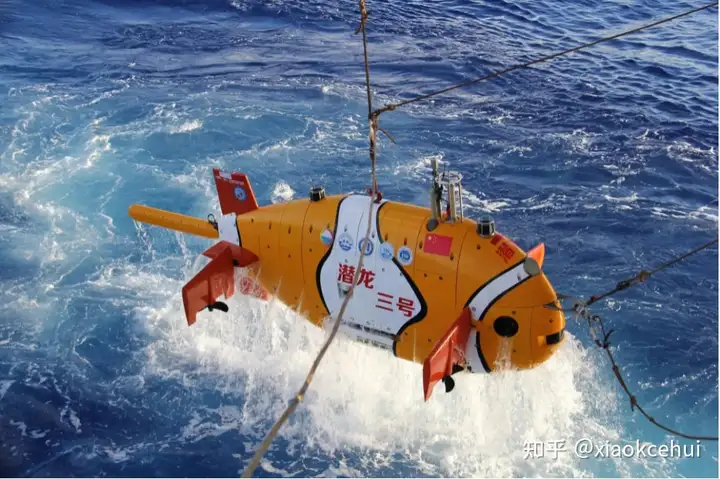
潜龙三号”长3.5米、高1.5米、重1.5吨。配备有许多高科技设备,在深海复杂地形进行资源环境勘查时,具备微地形地貌成图、甲烷探测、海底高清照相以及磁力探测等热液异常探测,主要用于深海复杂地形条件下资源环境勘查。它能在水下工作40多个小时,,国产化程度高、续航能力长,综合性能强是它的特点。它的这种像“小丑鱼”样的仿生设计能有效减少阻力,利于应对海底复杂的地形,使其能够航行稳定,规避障碍。 2 K! R, a* ?" H8 H
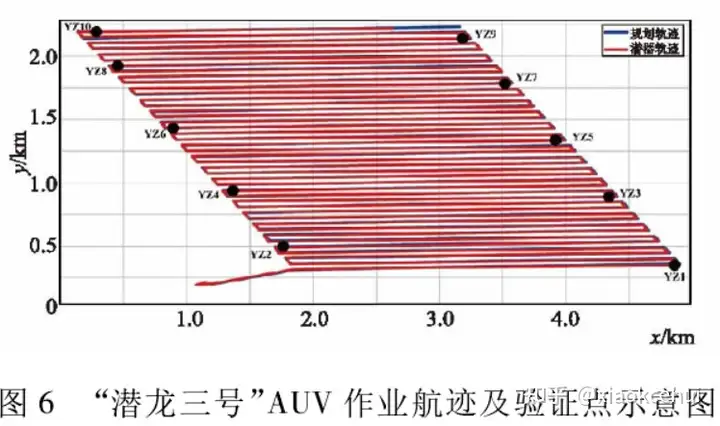
水下导航定位技术在大洋科考调查中的应用_王轲 “潜龙三号”AUV 在近底作业时,采用了惯导+多普勒声纳系统组合导航模式,同时融合了超短基线定位信息和深度信息。运用该组合导航模式,“潜龙三号”AUV 能沿设定测线进行航行作业,取得所需要的科学调查内容。下图 为“潜龙三号”AUV某潜次作业的航迹及验证点图。; w& m2 Q. e' q g5 w8 F I. U# Q6 W
* e0 c' p& U8 `' z- q5 b
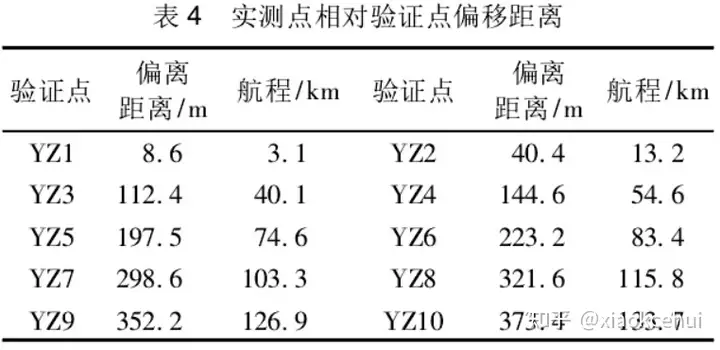
本潜次“潜龙三号”AUV 近底航程约 135 km,经解算,实测点相对于验证点的偏离距离见下表。
: }6 @) a0 a1 u; _6 K* q4 v
8 {: ?; S1 }) Z- K 从表 4 中可得到,实测点相对于验证点的最大偏离距离 Smax为 373. 4 m,定位精度优于 3‰×D( D为 AUV 近底航程) ,能够满足 AUV 近底精细化地形扫测的需要。 多普勒声纳系统( doppler velocity log,DVL) 是利用发射波和反射波之间的多普勒频移测量得到航行器相对于海底的航速和累计航程,主要为航行器提供纵向和横向移动数据。其优点是在很低的速度下仍有较高的测速精度,定位精度一般优于 1%×D,其中 D 为航行距离; 缺点是在海底需要采取较低频率才能跟踪较大深度,从而导致系统基阵尺寸过大。/ g, o6 b- o. S
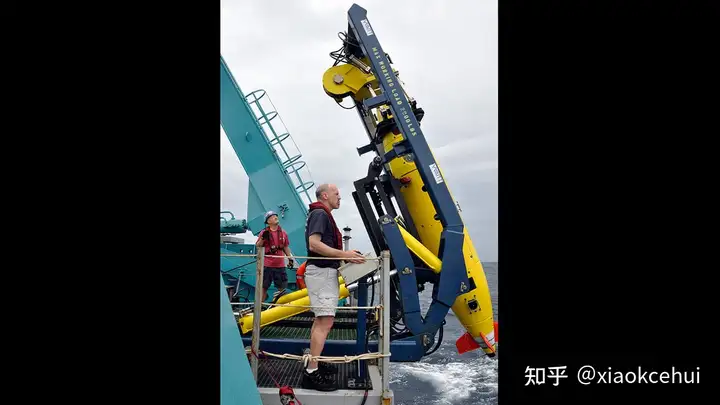
潜龙AUV专用收放技术研究进展_张洪彬 吊放式专用收放系统,于 2020 年 9 月随“大洋号”母船赴太平洋完成近海底专项航次调查期间,完成了海试验收并交付用户。吊放式专用收放系统性能稳定,表现优异,实现可借助 3 人完成对“潜龙四号”AUV 的布放和回收操作,该系统的成功研制可为后续大洋科考节约宝贵船时,并减少航次保障队伍的人员规模。该系统的成功应用实现了对 AUV 的自动化、少人化和高效化运维。) o6 m7 m. v- `: x- I
" j7 e4 N, e* w 滑道式专用收放系统,于 2019 年 11 月在千岛湖新安江试验场,完成了只依赖 3 人对 AUV 模拟器的布放和回收试验。顺利完成了湖试验收大纲的所有验收项,全面验证了各项功能指标,并择机开展海上验收试验。 : Y) E- o% [4 Z5 Y* {
( v7 r& [/ u. | E
9 |; V! a" I# C% }: C
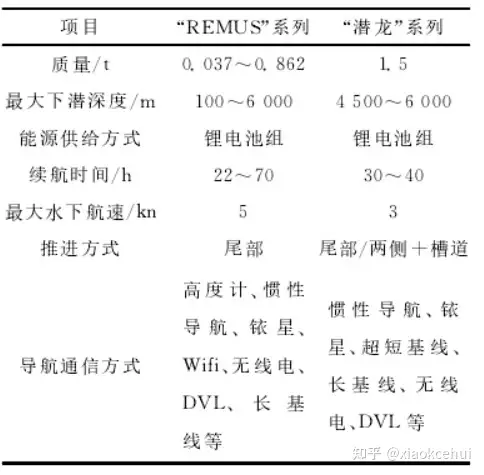
与美国 伍 兹 霍 尔 海 洋 研 究 所 (WHOI)“REMUS”系列的对比
0 k) Y7 v7 `. K! w3 f0 E, T “REMUS”系列已形成下潜深度为100~6 000 m 的谱系化产品,其中“REMUS-6000”曾被应用于打捞法航失事客机的黑匣子,其在水下利用声呐与母船互通以确定所处位置,利用高分辨率侧扫雷达扫描海底地形并绘图,利用磁力探测器探测 金属物体,利用摄像机进行光学成像,从而便于人员观察和分析目标。 5 Z5 f" T% k- S4 @: }5 \
' a% L. T2 Y" t& C' F" T- o
8 H* D3 e) P4 P* Q T 下面是潜龙与REMUS的技术参数对比表
- m$ L7 `9 i/ X0 L: y
) I' p( ?) o$ l/ t" I 由上表可以看出,“潜龙”系列与“REMUS”系列差距不大。近年来美国在该领域的研制重点为“REMUS”系列,并积极发展潜水器集群化作业;我国天津大学、中国科 学 院沈阳自动化研究所和哈尔滨工程大学等也在研制小型无人自治式潜水器,但在潜水器协同化作业和系列化生产等方面还有不足。
2 h$ i4 C0 }1 R. p8 \* E 文末展示一下“潜龙一号”、“潜龙二号”、“潜龙三号”和“潜龙四号”的图像。特别是“潜龙二号”、“潜龙三号”萌得让人无法自拔。
7 }. a. c: w- ~0 O8 l
8 D$ {7 j; d! r ; }& X+ L7 }# i, T# o; N6 I' k8 l
5 d; b Z) o5 d( S
. E+ H* k5 m7 l1 j. y+ \( x: |9 U/ l
& E5 Q5 t) v8 N% x/ R$ m3 }$ A) {( a" k9 B6 i% g5 K* ?' T$ ]- s% _
2 L) Y# Q+ E6 S9 j) A
; b0 }( L6 P5 y' K& I |