|
' p: n6 S% v) Z* Z" w

' n1 r4 |, R1 F* I4 k, p
【作者简介】文章作者丁巍伟,浙江义乌人,博士,研究员,主要从事大陆边缘动力学研究工作。本篇文章节选自论文《一种新型潜标式海洋地震仪及在海洋地震探测中的应用》,发表于《地球物理学进展》,2019年第34卷第1期。
' Q/ {" ?4 E+ q 声明:文章仅供学习与交流,不做商业用途,若需转载请注明由“水声之家”微信公众号平台编辑与整理。版权归媒体、原作者所有,文章观点不代表本机构立场。
! _- [0 {4 [1 h1 Y 【摘要】本文介绍了一种面向全球海洋地震P波长期探测的新型潜标式海洋地震仪.该地震仪不同于传统的固定式陆地地震台站或者坐底式海底地震仪,而是漂浮在海水中一定深度接收天然地震信号,并随着洋流运动.当接收到地震P波信号后,该地震仪可以自动上浮至海面,并通过卫星将数据传回岸基中心,然后下沉到指定深度继续工作.该潜标式海洋地震仪主要由水听器模块、浮力调节模块、通信与传输模块、能源模块以及中央控制模块组成,同时有安全监测功能,以实现准实时、大范围的天然地震P波信号长期监测.该海洋地震仪将突破现有海洋地震观测技术局限,拓展海洋地震监测的时空覆盖范围及监测尺度,为海洋地震研究和地球深部构造提供准确可靠的数据. 9 A) h1 P- y2 I" L
【关键词】潜标式海洋地震仪;天然地震 波;模块化设计;长周期监测 波;模块化设计;长周期监测
, z& q2 D2 N# y" ~# O 0.引言
' F7 y) E$ D1 x' x# t 地震学是研究固体地球的重要地球物理学科,目前对于地球内部圈层结构(地壳、地幔、地核)的认识主要来自于地震学的认识,也即对源于地震产生经地球内部传播到达地表并被观测到的地震波的认识.自20世纪30年代反射地震学形成一门学科分支以来,它已经成为地球内部结构研究和其他地学研究的重要方法,其应用学科-勘探地震学在油气勘探等领域作用巨大,发展迅猛.反射地震学的成功应用和发展与现代科技总体水平密切结合,也与信息科学及相关地质学科发展相互促进. & M& D1 i% Q; a$ ] R
现代数字化宽频地震仪为我们研究更精细、更深层的地球结构提供了可能.目前全球已经布设了大量的数字化宽频地震台网,但是相对于陆上布设非常密集的台站,占全球面积近2/3的海域缺少地震台站,尤其是南半球.这种分布不均匀的台站对于全球规模的构造和结构研究带来了很大的困难.
* }# {4 q% @) w$ c$ o8 f6 q 目前对于海洋区域的地震观测主要是使用海底地震仪(Ocean Bottom Seismometer,简称OBS),这是一种将检波器直接放置在海底的地震观测系统,既可以用于海洋的主动源地震观测,也可以用于被动源天然地震的观测(胡昊等,2016;万奎元等,2016).但由于海底地震仪仪器本身的价格较高,以及必须配套与OBS投放、震源激发和回收等相关的地球物理航次,使得其调查成本很高.同时虽然近几十年来利用海底地震仪的二维和三维深地震勘测取得了极大的进展,但相对于广袤的海域来说射线覆盖率依然很低.因此亟需研制一种新型的潜标式海洋地震仪.这种地震仪不同于传统的固定式陆地地震台站和坐底式海底地震仪,而是悬浮在海水一定深度,并随着洋流运动,不仅可以长时间记录地震传达的信息,而且可以记录不同地点接收到的地震信号.由此可以形成覆盖较大海洋面积的地震台网,解决了海洋(除岛屿外)没有地震台网的难题,特别适合对较大面积海域开展层析成像工作.
( K$ j( t. [" C 1.潜标式海洋地震仪的技术特点
5 Q$ d& W# ^) c7 Q 潜标式海洋地震仪系统主要用于海洋地震P波长期监测,平时可以潜在SOFAR (Sound fixing and ranging channel,800~1200m)声道工作,接收到地震信号后可以自动上浮到海面上,通过卫星(北斗、铱星等)把数据传回岸基中心,然后再下沉到设定深度继续工作(图1).该地震仪可以设定工作水深(0~1200m,设计最大水深3000m),并随着洋流作浮游运动,这样可以准实时、大范围、长时间记录不同地点传来的天然地震信息.当接收到天然地震信息后,对多个潜标式海洋地震仪进行动态组网规划控制,并加快系统的工作频率,以便最高效率、最大限度地获得海洋地震波的时空数据,这也是与现有海洋地震观测设备(如海底地震仪)不同的工作方式.
; x4 J! ~. g1 f, K- } 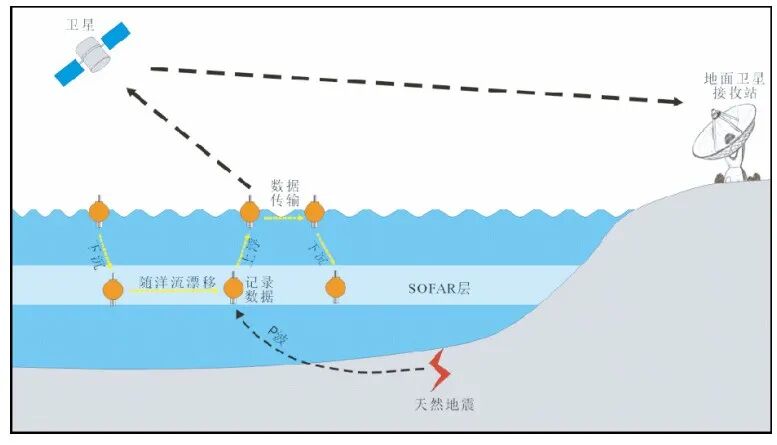
7 F2 G8 O, K' D' x- b 图1 潜标式海洋地震仪工作示意图 z: C0 i. b+ z/ F3 X
2.潜标式海洋地震仪的模块化设计 & D! t {; ?; j( `
潜标式海洋地震仪系统采用模块化设计.各模块之间的接口均采用标准化设计,不仅可以化繁为简,确保在机械、电子、通信等标准下的兼容性,而且有利于发现系统的瓶颈问题和关键技术的攻关.该系统主要由水听器模块、通信与定位模块、能源模块、浮力调节模块和中央控制模块组成,并通过系统集成及实现技术有机的集成在一起,同时设计安全监测功能. + y. R. u; H1 i5 a1 t2 m+ o
2.1 水听器模块 * R# @1 q& x8 e; z# c ]& `+ W/ G
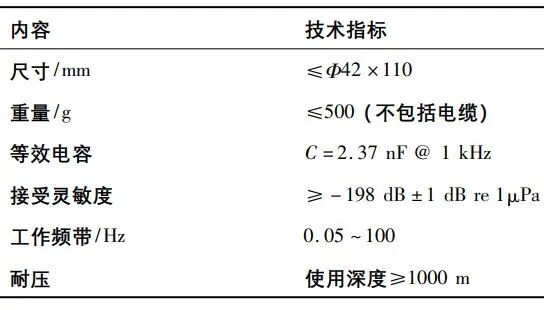
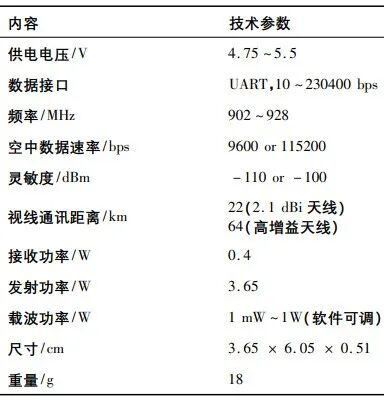
水听器模块是潜标式海洋地震仪的“耳朵”,用于天然地震P波信号的接收和记录.鉴于天然地震P波的频率较低,水听器模块采用甚低频、低功耗和高灵敏度技术,结构上为耐压圆管.由于压电陶瓷球和压电陶瓷管具有对压力敏感的固有特性,因此深水水听器的设计难点在于提高水听器耐压特性的同时,还要保证其接收灵敏度不受损失.水听器模块采用高灵敏度压电陶瓷圆管作为接收灵敏器件,通过结构创新设计,采用高强度应力释放杆解决了整体结构耐大静水压力问题(图2).整个结构采用水密橡胶硫化工艺作为外包覆层,不但可解决水密问题,同时橡胶的良好低渗透性也可确保水听器能够长时间在深海中工作,生存时间一般不小于8年.水听器整体结构保持良好的空气背衬式,所以此类深水水听器具有较高接收灵敏度.水听器的主要技术指标如表1所示.
8 h! w/ n. b9 d1 z+ i! I6 n5 |0 n 表1 水听器主要技术指标 + X/ ?, {0 M4 Q; f' e# ?
{, {) i: e1 `; S; e/ a
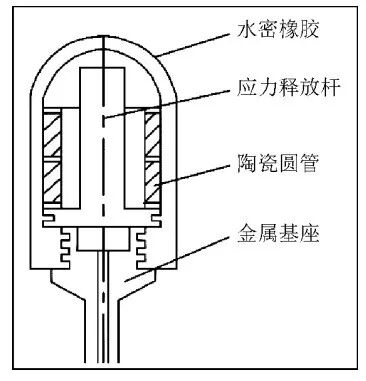
8 {6 Q5 X; q& F2 S 图2 耐压圆管压电陶瓷水听器设计图 0 h6 z4 e9 w9 J9 A1 c, s: Y* D
2.2 浮力调节模块 * u2 x; i& O& l$ s& y/ n; U
浮力调节模块采用低功耗的液压式油囊浮力调节装置实现潜标式海洋地震仪的自动浮沉.在实际设计中采用柱塞泵式结构,其构成包括直流电极驱动机构、齿轮减速和由其驱动的滚珠丝杠副组成,其中套筒套装在滚珠丝杠的螺母上,两者固结(设计图见图3a,样机见图3b).潜标式海洋地震仪需要下沉时,控制模块控制电源模块给减速电机正向供电,减速电机转动,同时驱动滚珠丝杆螺旋转动,滚珠丝杆的轴向运动驱动活塞在缸体内滑动,将油囊里的液压油吸入缸体,减小潜标式海洋地震仪的体积和浮力,当重力超过浮力时,潜标式海洋地震仪则会自动下沉,达到一定深度后,即当重力和浮力重新平衡后,潜标式海洋地震仪会停止下沉,并始终保持在该深度(等密度面)上漂移.反之,潜标式海洋地震仪需要上升时,控制模块控制电源模块给减速电机反向供电,将缸体里的液压油推入油囊,增加地震仪的体积和浮力. ; s& S* A. g) O5 c3 s3 j" G
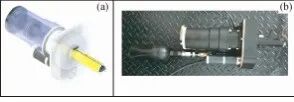
& ]; I. h% c0 c# j4 r+ \: h V4 e8 D 图3 浮力调节模块设计图(a)及样机(b)
5 W1 H; S2 L5 ?) @# U) W 潜标式海洋地震仪的浮力调节模块采用了各种方法保证仪器能可靠、高效、长时间工作.与液压油接触的各元件均采用了专用的密封件,保证在油气囊受到水深2000m外压时油囊和缸体里的液压油不会外泄,地震仪能长时间停留在指定的深度.高品质的减速电机、滚珠丝杆和各种精密加工可靠性高,摩擦力小,能保证升降装置耗电较小,延长地震仪的寿命,提高地震仪的可靠性.专用的制动结构设计和转速测量设计,能保证电机随时停止工作,实现油量(浮标体积)的精确控制,保证地震仪停留在指定深度上. ' H% B( y+ A. C- O+ n$ Q
2.3 通讯与传输模块
# g3 H2 K% f+ q1 ?. L, q. X* a) Q* l 通信与传输模块采用透明传输技术,以解决多功能海底地震仪与监控中心的通信链路问题.天线的封装采用环氧树脂封装技术,并进行安装结构设计和试验验证等研究工作.通讯系统采用无线电和铱星两种通信方式,前者用于调试阶段,后者用于正式作业阶段. 4 o. L) ?" m2 J; E( L6 z
无线电采用美国DIGI公司的9Xtend OEM无线通讯模块,该通讯模块具有较高的接收灵敏度、可靠的数据链、传输距离远等特点.9Xtend OEM无线通讯模块主要参数如表2所示.多功能海底地震仪载体上安装的无线电通讯天线为小型小增益天线,增益为2.1dBi;支持母船上安装的天线为高增益天线,增益为8.1dBi,且可以安装在母船的较高位置处,以改善无线电通讯效果. & b) w _' j& ]; k
表2 9Xtend OEM无线通讯模块主要参数 1 O( m8 Y4 u- l) E+ e( R
- r) I/ C- m7 y, e- p
卫星通信主要特点是不受通信距离限制,但是通信费用高,数据传输速率低.目前能够提供卫星通信的有多家单位,国内有北斗系统,国外有铱星系统、ORBCOMM系统、全球星系统等.北斗系统的发射模块相对较大,功耗大,通信速率低,每次最多能发送120B,发送间隔60s,并且服务区域有限;国外的商业卫星通信系统从数据终端、通信资费、通信速率、覆盖范围综合考虑,铱星系统具备较高性价比.铱星9523模块具备短报文发送、点对点拨号实时传输功能,同时可集成GPS定位功能.多功能海底地震仪系统利用9523数据通信模块,采用点对点实时通信,同时预留北斗卫星模块的扩张借口,作为备用系统.铱星与北斗系统性能比较见表3. # K% K9 h" Y5 N& O8 d) J: C7 E% K
表3 铱星系统与北斗系统性能比较
8 J: s! H" S4 H 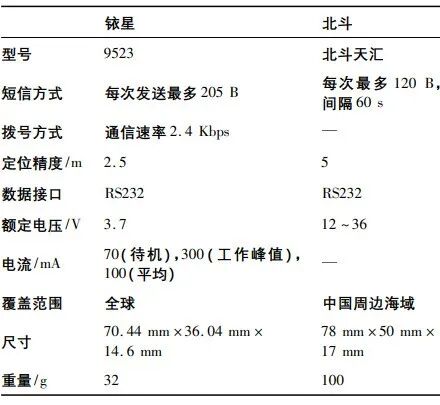
5 o+ ?% V6 ^7 W* W$ S 2.4 能源模块
: |% L$ O6 o! x: J" f; u' I# w5 J 能源模块直接决定了潜标式海洋地震仪的工作时间.其核心的电池模块选用一次性且能量密度高的锂亚硫酰氯电池,该锂电池和其他一次性电池相比具有以下主要特性:能量密度高、电压稳定、温度适应范围广、保质期长,具有低温防护功能,低温电池容量影响小.为提高电池模块的安全性,并延长电池的使用寿命,在电池组外围加装安全保护和存储电路. % h: I: ?0 G7 g7 }* z
集成后的电池组由控制系统的电源管理模块对其进行管理,依据潜标式海洋地震仪的工作流程,可分时、分段对不同电池组分别进行管理,使其既能稳定工作,又能保证工作过程中有足够的功耗,维持较长的使用寿命.海洋地震仪系统最大功耗主要集中在浮力调节机构运行、主控系统这两能耗设备上,且电机运行时会产生较大的电流.为避免电机运行时对其他系统产生干扰,本地震仪在设计时采用两套相互独立的电池组供电系统,其中一套专用于浮力调节机构,另一套为其余能耗设备供电.同时,应急处理系统再额外单独采用一组供电电源.
) H' y6 C6 }" Y2 u% B* T 一些驱动模块、通讯模块等大功率模块在不需要运行的时间处于休眠、或者断电状态,以保证设备在海中进行长期的作业.
! G2 F0 P1 [+ Y* J0 X7 G 2.5 中央控制模块
* _( x; d; A8 d9 P 中央控制模块是整个潜标式海洋地震仪的大脑,不仅控制着其他4个模块,同时控制安全监测功能.除了接收甚低频水听器信号之外,还可接入温、盐、深等传感器信号(需外加相应传感器),可在线分析信号,也能存在SD卡和内存中,通过串口与网口输出数据.为了尽可能低功耗,除了选择低功耗芯片等器件外,细化中断功能,开启睡眠功能,尽可能降低功耗开支,确保海上足够的值守自持能力. ; Z% g7 }5 `8 v) r8 f3 Y- [
该控制单元采用ARM Cortex M4处理器,该处理器是基于一个支持实施仿真和嵌入式跟踪的32位CPU.与通常采用的PC104嵌入式处理器相比,ARM Cortex M4处理器的功耗要低超过2个数量级.为了提供系统可靠性,选用ARM Cortex M4成熟工控板作为核心控制板. 8 f; G" j$ ^/ g5 p* Q
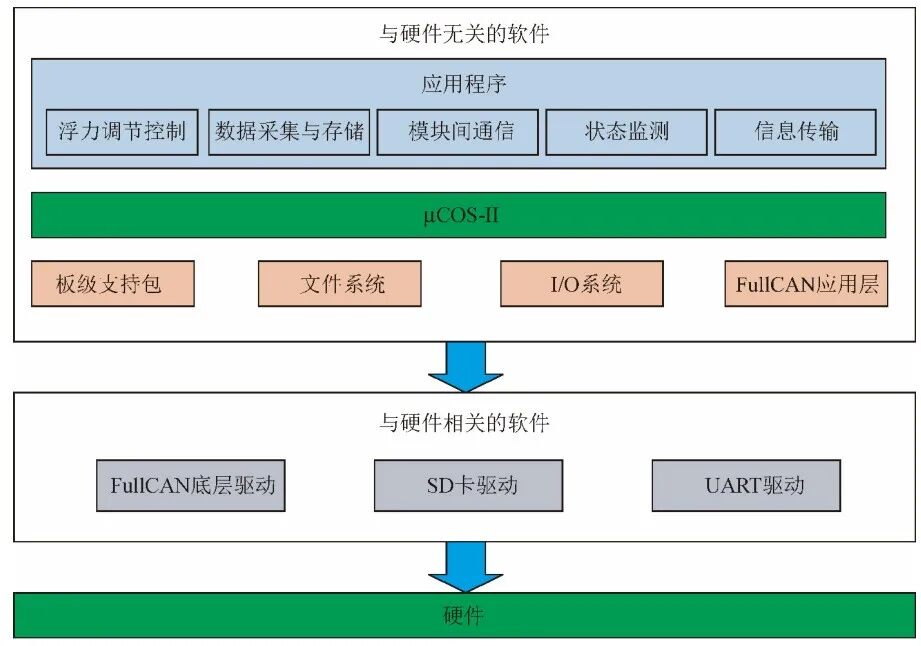
潜标式海洋地震仪中央控制单元的软件部分基于μCOS-II嵌入式多任务操作系统开发,实现多功能地震仪的浮力调节、数据采集与存储、信息传输、状态监测及其他模块之间的通信等功能,如图4所示. 1 C$ H% \ @" l' x5 x5 p# c
8 n5 K6 t' N1 s$ p
图4 中央控制模块软件结构图
: J( N$ M Z- @0 @% s% ?; j6 `9 e 2.6 监控系统
( q( c5 U# h! f# `( O 多功能海底地震仪监控系统由监控软件和硬件通信单元组成.监控软件采用可视化编程软件设计(Visual C语言),主要功能有任务规划和制定、运动轨迹显示、系统故障报警、通信状态指示、数据存储、任务指令发送、数据接收等(图5).硬件通信单元主要功能是建立监控中心与多功能地震仪之间的通信链路,进行数据的上传和命令的下达.
7 j# V* G8 F4 _3 j, X0 t% { 
) p7 o3 o+ k+ B 图5 潜标式海洋地震仪监控系统 ) |. k9 m0 R. Z9 |: k: i9 X
监控系统拥有多台海洋地震仪协同作业分配与调度功能.当某一台潜标式海洋地震仪检测到地震信号时,控制该台地震仪快速地上升、下降,记录地震信号;当浮出水面时,监控系统根据回传数据,控制其他的潜标式海洋地震仪组网快速地上升、下降,以记录地震波的时空信息;当潜标式海洋地震仪检测到风暴潮等恶劣天气时,控制所有的潜标式海洋地震仪停留在深海里,以保护潜标式海洋地震仪。 0 G8 \) a R* m
3.性能测试与验证 ; h% p9 ]0 k8 i! f7 z
潜标式海洋地震仪目前仍属于海洋地震学领域的最前沿,目前只有法国尼斯大学和美国普林斯顿大学等极少数科研单位掌握这方面的技术和研发能力,并有实际应用的案例(Lubik,2011;张树良和鲁景亮,2016; Cormier and Berenguer,2017).自2003年以来法国尼斯大学科学家及部分工程师合作创建了OSEAN公司进行美人鱼系统(Mobile Earth quake Recordingin Marine Areasby Independent Divers,简称MERMAID)的研制与开发,并在2012年生产出批量化成品进行了一系列的海试工作,包括2012年地中海的海试工作,2013年印度洋的海试工作,以及2015年开始在加拉帕格斯群岛的海试工作.其中在加拉帕格斯群岛的海试中一共投放了21台美人鱼系统,并一直工作至今,并已获取了大量的天然地震P波数据(Sukhovich et al.,2015). 3 `* v: K; r- y+ F
国内相关的研究工作尚处于起步阶段,截止目前未有实际的海试及实际应用的案例.国家海洋局第二海洋研究所与浙江大学在2015年开始进行相关的设备及模块研制工作,目前已研制并组装出一台原理样机,并已获得实用新型专利(黄豪彩等,2017).海上实验工作将于2018年4月在浙江大学摘箬山岛实验基地进行。 9 o, H7 Q k9 m6 k6 R
4.潜标式海洋地震仪的前景
# y1 K+ l% S: m: { 研制潜标式海洋地震仪系统,实现准实时、大范围的海底地震信号长期观测,不仅可以为海洋地震研究和地球构造、活动与过程研究奠定坚实基础,同时也支撑中国地震监测走入深海,大大提升我国主持或参与全球大型海洋国际合作计划的能力和机会.2013年开始法国尼斯大学地球物理学者开始提出了Mari Scope计划(Joubert et al.,2013; Nolet et al.,2014; Hello et al.,2015),计划在全球布放至少1000个MERMAID系统,形成类似ARGO的观测网,弥补占地球2/3面积海洋区域地震射线的空白.目前已经有欧洲海洋研究署、美国WHOI海洋研究所,日本JAMSTEC等在内的海洋研究机构提出了合作意向.进行我国主导的潜标式海洋地震仪的研制与应用工作,可以使得中国在MariScope国际计划中占据先导地位. ( N" T9 X" l/ ~- Z# H9 R- \
【参考文献】
" k, v: _) }& K2 c [1] 胡昊,阮爱国,游庆瑜,等.2016.海底地震仪远震记录接收函数反演———以南海西南次海盆为例[J].地球物理学报,59(4):1426-1434,doi:10.6038 /cjg20160423. 4 f, y+ K& K8 ?- O' d7 W
[2] 黄豪彩,丁巍伟,阮爱国,等.2017.漫游式海洋地震仪[I]. 实用新型专利,中国,授权公告号CN206321805U.
n$ S) O8 z( C [3] 万奎元,曹敬贺,夏少红. 2016. OBS广角地震探测中二次反射Pg震相特征及在地壳结构成像中的作用[J].地球物理学报,59(8):2818-2832,doi:10.6038/cjg20160809. 5 y0 e; m2 s6 V9 r. V
[4] 张树良,鲁景亮.2016.普林斯顿大学成功开发新的海底地震监测设备[J]. 国际地震动态,12:3-4. : l) P P0 j; g5 z( O+ [) d- c: d
 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
# N! O+ @1 O5 n v6 v+ v7 y+ F2 C 声明:版权归媒体、原作者所有。
& a- h, i+ a6 u) E1 p 文章观点不代表本机构立场。
2 G: R; T" m3 K$ ^6 X0 c7 q0 d: E; h8 S& O7 u2 W$ d
1 ^( l( V$ e4 F: |+ e7 x2 r% |: K% s8 t
5 Z' V3 }2 R5 x$ E | 

