|
, Z9 U) s. O( u9 x
海洋测绘是测绘科学的一个重要分支,以高精度方式对海底和水体所包含的对象进行测量,如水深、重力、磁力、海底地质及水文资料,服务对象包括水面舰船、潜航器的安全航行、海洋工程作业、海洋科学研究等。此处的“高精度”包含两个层面的含义:一是对特定要素自身物理属性的测量精度,主要受传感器及数据处理算法性能的影响;二是测量位置的精度,此精度随测量对象自身属性和测量任务的要求而异,通常要素属性的空间变化性越强,或者对航行安全的影响越大,对定位精度的要求就越高,具体可参考各测量规范的要求。“位置是地理信息的核心要素”这一基本理念,也充分说明了位置准确性在测绘中的重要性。
" l8 b A3 B7 N( c 而海洋地球物理场导航的研究思路则是如何利用各种地球物理信息为海洋航行器提供最优的位置参照及改正信息。由于水上飞航器、水面舰船可以稳定的利用GNSS系统获得米级、亚米级甚至厘米级的定位服务,地球物理场的导航作用更多的体现在水下航行器(以下称作潜航器)上,应用场景包括海底测绘、目标探测、水文测量等。地形、地磁、重力是最常用于导航研究的三种地球物理场形式,在应用方式、导航原理及系统性能上既有共通之处,又有明显的差异。下面,我们从是否拥有导航区域先验测绘资料的角度对地球物理场导航方法展开讨论。
$ F! S; w1 b$ ?( ` 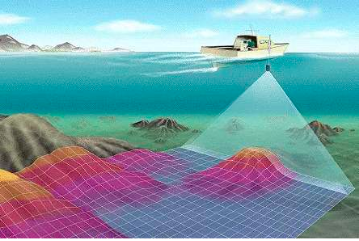
; P2 J! r( o& Z2 E2 @ 图1 图片来源(关于海底地形测量的认识) 一、基于海洋测绘资料的匹配导航匹配导航是最经典、最成熟的地球物理场导航方式,基本要求是要具备导航区域相应物理场的先验地图,包括海底地形图、重力图、地磁图等,又叫做基准图。由于这些先验数据是事先存储在导航计算机数据库内,因此又把匹配导航方式叫作数据库导航。而匹配导航的性能主要取决于三个方面:基准图及实时测量数据的质量、导航区域地球物理场的适配性、以及匹配定位算法的性能。1. 基准图海洋测绘资料是匹配导航基准图的主要数据来源。通常,海洋测绘工作的实施需要满足严格的国家或行业规范,如《GB∕T 17501-2017 海洋工程地形测量规范》、 《GJB 7537-2012 海洋磁力测量要求》、《GJB 890-1990 海洋重力测量规范》等。多波束是进行海底地形测量最重要的手段,理论上经水位改正可以得到WGS84(或CGCS2000,由GNSS系统决定)下各脚点的精确三维坐标,从而刻画海底地形的空间变化特征。海底地形的特征量相对单一,但其特征变化的空间尺度一般较小,空间特征相对于重磁场更加丰富。重力、地磁场是矢量场,其空间特征量远比地形特征更加多样。以地磁场为例,包含总磁场强度、磁倾角、磁偏角、平面分量、垂向分量、东向分量、北向分量,其中有三个是完全独立分量。此外,又可用梯度张量描述地磁场三个正交分量的空间变化性,包含5个独立分量。重磁场在空间结构上也更加复杂,重力场由正常重力场和重力异常场组成,地磁场则由地球主磁场和地磁异常场组成。异常场是由于地球内部质量及磁性物质分布不均匀所产生的,相比于主场或正常场空间变化特征更加丰富,是匹配导航的关键。基准图的表现形式主要有网格图和等值线图,分别应用于不同的匹配模式下。目前海洋重磁测量的直接对象是是重磁场总强度,或附加某些特定方向上的梯度信息,结合主场和正常场模型进行数据处理可以得到异常场信息。基准图的质量决定了匹配定位的最高精度。  图2 图片来源(百度百科、fund.cssn.cn)2. 地球物理场的适配性适配性是指导航区域内地球物理场适用于匹配定位的程度,主要取决于匹配特征量在该区域内的丰富程度,并且难以用某一个独立指标进行完备的表示。以地形特征为例,常用的适配性指标包括:地形粗糙度(表征区域内地形高程起伏的丰富程度)、地形坡度(表征高程起伏的剧烈程度)、地形相关系数(表征不同方向或子区域内地形特征的相似程度)等,这些指标也可以直接应用于重力、磁力特征量。单一某个指标具有较强的片面性,比如当地形在X轴不同位置处,均表现出相同且强烈的Y方向起伏特征,地形粗糙度将会很高,这表示有利于匹配,但不同位置的相关性太强,导致匹配结果出现多解甚至无解问题。因此,往往综合采用多个独立指标共同描述某一区域的场特征,比如可以设计模糊准则,利用模糊算法计算综合评价指标,进行尽量合理、完整的适配性表达。3. 匹配定位算法如何将实时测量的地球物理场数据序列匹配到基准图上,并找到尽量准确的唯一位置是匹配定位算法的目的。常用的匹配算法包括TERCOM(地形轮廓匹配算法)、ICP(最近点迭代算法)、ICCP(迭代最近等值线算法)等及各类改进算法。但匹配定位算法通常不是完全独立工作的,尤其在导航区域较大的情况下,匹配区域过大将导致搜索计算量的急剧上升,降低实时性,并容易导致错误匹配问题。因此通常将惯性导航系统(INS)或DVL推位系统作为主导航系统,以其直接输出的位置为中心,并基于概略误差确定匹配区域,进而开展匹配定位。将匹配结果作为当前准确位置,并为主导航系统提供位置校正信息。根据公开文献,国际上开展的水下地形匹配工作已较丰富,并且已经在某些AUV上实现了成熟的商业化应用。相关研究机构包括挪威防务研究中心、瑞典皇家理工学院、斯坦福大学和南安普顿大学等。挪威防务研究中心研制的HUGIN AUV在海洋工程领域取得了广泛的应用,并基于该AUV开展了一些地形匹配导航的理论和实验研究。在海试工作之前,他们研发了TerrLab用于海底地形和地形匹配导航仿真研究。为了验证实际效果,该机构在2009和2010年分别开展了两次海试实验。2009,在挪威海岸和白令岛之间的公开海域进行了50km的水下航行试验,该实验完全基于地形匹配导航系统进行定位,定位结果与水声定位之间仅有4m的差别;2010年5月在奥斯陆湾开展了第二次海试实验,在5个小时的航行之后,通过与GPS定位结果相比,定位误差在5米左右。
l. w3 U7 Q# y, q( Q 图2 图片来源(百度百科、fund.cssn.cn)2. 地球物理场的适配性适配性是指导航区域内地球物理场适用于匹配定位的程度,主要取决于匹配特征量在该区域内的丰富程度,并且难以用某一个独立指标进行完备的表示。以地形特征为例,常用的适配性指标包括:地形粗糙度(表征区域内地形高程起伏的丰富程度)、地形坡度(表征高程起伏的剧烈程度)、地形相关系数(表征不同方向或子区域内地形特征的相似程度)等,这些指标也可以直接应用于重力、磁力特征量。单一某个指标具有较强的片面性,比如当地形在X轴不同位置处,均表现出相同且强烈的Y方向起伏特征,地形粗糙度将会很高,这表示有利于匹配,但不同位置的相关性太强,导致匹配结果出现多解甚至无解问题。因此,往往综合采用多个独立指标共同描述某一区域的场特征,比如可以设计模糊准则,利用模糊算法计算综合评价指标,进行尽量合理、完整的适配性表达。3. 匹配定位算法如何将实时测量的地球物理场数据序列匹配到基准图上,并找到尽量准确的唯一位置是匹配定位算法的目的。常用的匹配算法包括TERCOM(地形轮廓匹配算法)、ICP(最近点迭代算法)、ICCP(迭代最近等值线算法)等及各类改进算法。但匹配定位算法通常不是完全独立工作的,尤其在导航区域较大的情况下,匹配区域过大将导致搜索计算量的急剧上升,降低实时性,并容易导致错误匹配问题。因此通常将惯性导航系统(INS)或DVL推位系统作为主导航系统,以其直接输出的位置为中心,并基于概略误差确定匹配区域,进而开展匹配定位。将匹配结果作为当前准确位置,并为主导航系统提供位置校正信息。根据公开文献,国际上开展的水下地形匹配工作已较丰富,并且已经在某些AUV上实现了成熟的商业化应用。相关研究机构包括挪威防务研究中心、瑞典皇家理工学院、斯坦福大学和南安普顿大学等。挪威防务研究中心研制的HUGIN AUV在海洋工程领域取得了广泛的应用,并基于该AUV开展了一些地形匹配导航的理论和实验研究。在海试工作之前,他们研发了TerrLab用于海底地形和地形匹配导航仿真研究。为了验证实际效果,该机构在2009和2010年分别开展了两次海试实验。2009,在挪威海岸和白令岛之间的公开海域进行了50km的水下航行试验,该实验完全基于地形匹配导航系统进行定位,定位结果与水声定位之间仅有4m的差别;2010年5月在奥斯陆湾开展了第二次海试实验,在5个小时的航行之后,通过与GPS定位结果相比,定位误差在5米左右。
l. w3 U7 Q# y, q( Q 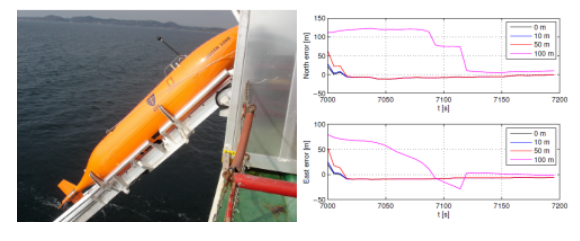
; T; |. E8 I, T, I
图3 图片来源(An Analysis of Real Time Terrain Aided Navigation Results from a HUGIN AUV) 二、无先验地图的同步定位与构图方法目前匹配算法的研究已经基本成熟,开展广泛应用的主要限制因素在于海洋地球物理场资料不够充分以及部分区域适配性不足。海洋占地球总面积的70.8%,目前我们所掌握的测绘资料与完整的海洋区域相比相去甚远。当潜航器需要到未知水下环境中执行测绘、目标搜寻等任务时,急需探索如何利用实时观测的地球物理场信息辅助自身提升导航性能。同步定位与构图方法(Simultaneous Localization and Mapping, SLAM)就是在这种需求下发展起来的。SLAM技术类似于我们在一个未曾到过的环境中寻找特定目标(比如一个书店、餐馆等)的过程,在搜寻过程中利用视觉观察环境信息,并逐渐在在脑中构建出该区域的地图,对同一事物的反复观测以及封闭的搜寻轨迹则是建立准确地图并判断自身位置的关键。因SLAM方法具备适应和利用未知环境的特性,因此表现出较强的智能性。SLAM主要分为基于滤波的和基于图优化的两种模式。
0 |; k& @2 o* @' Q 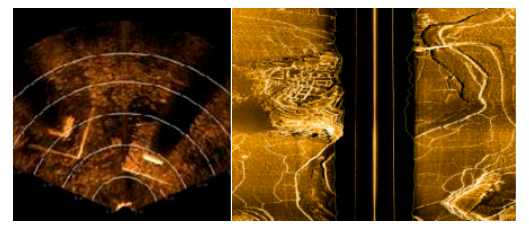
图4 图片来源(views.tuxi.com.cn、shark-s450u无人平台侧扫声呐)1. 基于滤波的SLAM方法同步定位与构图,即在运动过程中,利用实时观测的环境信息辅助提升导航状态的估计精度,并同步构建环境地图。最经典的SLAM系统是基于环境特征(feature-based SLAM),并采用滤波方式进行迭代估计。它本质上是一种组合导航系统,状态量包括航行器的二维或三维位姿变量以及被观测环境特征的位置。随着航行器不断观测到新的特征并将其补充到状态向量中,状态量的维度不断扩充,迭代滤波解算的效率逐渐下降,因此这种基于滤波的SLAM方式难以适用于大规模的导航环境中。SLAM系统中的核心在于有效的数据关联(即判断当前观测到的特征是否在之前被观测过,即是否已经存在于当前的地图中),在基于特征的SLAM系统中,数据关联的作用具体体现在两个方面:一是在相邻的时刻上,通过数据关联确定共同观测的特征,可以为连续的导航位姿估计提供约束;二是闭环检测,当航行器出现交叉时,通过数据关联可以确定出航迹的闭环,这是校准导航系统积累误差的最有效约束,可以在极大程度改正估计误差,提升导航状态和地图构建的精度。目前基于特征的水下SLAM方法研究基本是基于声呐传感器和光学摄像机来进行的。声呐传感器包括前视声呐、侧扫声呐、机械扫侧声呐等,通过从声呐图像中提取典型的海底目标特征,构建SLAM模型。不同的声呐有各自的优缺点,如前视声呐分辨率相对较低,侧扫声呐无法在连续位姿上构建数据关联等;由于水下光线较弱,光学摄像机只适合在小范围环境中使用,局限性较强,但准确性高。此外,将磁信标作为路标也是一种可行的方案,但是由于磁信标的磁场随空间距离迅速衰减,可探测距离有限,因此更适合用于小范围场景中。2. 基于图优化的SLAM方法 与滤波SLAM方法的迭代估计过程不同,图优化SLAM是对导航解算模式的一个变革。它将整个过程分为前端和后端,前端负责因子图构建,利用航行器运动过程中自身内部导航传感器的导航输出,以及传感器对环境特征的探测,完成图节点、图因子及其拓扑关系的构建,其中一个关键问题是通过数据关联进行闭环检测;后端则综合利用一段时间或空间范围内的约束因子集合,设计目标优化函数,对相应节点集合的位姿状态进行优化估计。当图因子与带求解参数是非线性关系时(如距离与位置的关系),需要用非线性优化算法进行解算。图优化解算的优势在于效率高、精度高,能够更好地应用于水下大规模导航环境中,这也是当前水下SLAM研究的主流方向。基于图优化的SLAM方法既可以基于特征(声、光探测目标),又可以基于物理场观测信息(包括地形、重力场、地磁场甚至无线电信号)。基于特征的图优化SLAM中,特征将成为因子图中的特征节点,与观测到它的位姿节点通过特征观测因子相关联。在优化解算时,航行器所有位姿节点的位姿和特征节点的位置构成完整的待解算参数,而特征观测因子以及闭环则构成优化解算时的约束条件。而当潜航器搭载多波束水深测量设备时,可以实时获得以航迹为中心的条带水深数据,当条带出现交叉或者部分重叠时,可以通过区域水深数据的高精度匹配实现闭环,进而进行优化解算。而由于航行器只能测量当前位置点的地磁场和重力场数据,因此要通过地磁或重力数据序列进行匹配建立闭环因子,需要航迹有很好的重复性,因此应用场景受限。
( `& I; u( C! f6 Z+ J( c2 b 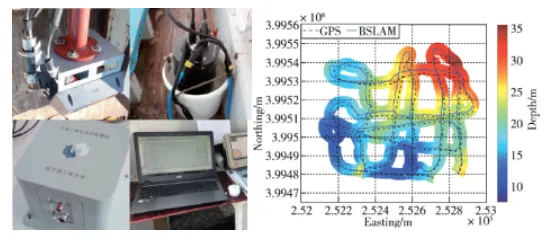
图5 图片来源(AUV图优化海底地形同步定位与建图方法)结束语:理论上,当惯性导航系统达到足够高的精度且成本较低时,其完全自主的导航方式就可以满足水下空间的所有导航需求。但是当精度和成本二者无法同时达到用户需求时,仍必须设计适当的组合导航方式提高相对于单一惯性系统的导航精度,而地球物理场的辅助方式是水下组合导航的重要方向之一。* g' p: ^2 H4 u, A& V5 N9 H [
作者简介:
. n: A. j$ p [: c 常帅,博士,天津大学海洋科学与技术学院讲师,硕士生导师,于2019年至2020年在美国里海大学做访问学者。研究方向为水下无人系统导航与控制技术,发表SCI、EI论文20余篇。   —END—信息来源:天津大学海洋科学与技术学院 常帅转载请注明信息来源及海洋知圈编排 —END—信息来源:天津大学海洋科学与技术学院 常帅转载请注明信息来源及海洋知圈编排 大家都在看
( T# i- G4 D; f 大家都在看
( T# i- G4 D; f 
" k4 z0 G' N( D& t {
►浮游生物数据共享平台EcoTaxa(中文版)正式上线 | 附网址 f5 H: b' j+ I3 Q, i$ ]2 r# l
►正式启动!大奖获得者可参加南极、北极、大洋科考活动!第12届全国海洋知识竞赛答题入口(大学生组、公众组)公布 ; H2 O5 V O; T$ _8 S
►《10000个科学难题(海洋卷)》全网独家首发
1 g! n" ^/ d$ L4 \. }1 w0 n ►《海洋环境分析监测技术》中科院烟台海岸带所陈令新研究院等编著
; G1 w. Y! j/ Q9 b4 q- Z# ^ ►《自主水下机器人》封锡盛院士等主编、徐会希高工等著
; T& e; f! z- v% l+ K( c+ `& O ►《渤黄东海生源要素的生物地球化学》中科院海洋所宋金明研究员等编撰
$ l1 I" j6 ~/ j4 R3 E ►《现代海底热液活动》栾锡武研究员 著 ; G% Z( W) i2 r q3 w& }4 _
►我国首部风暴潮数值预报专著《现代风暴潮预报技术及应用》正式出版发行! 7 g1 \0 l7 n# ^& m1 e3 I% E) E' K2 X
►《海洋和海岸环境塑料污染与治理》骆永明等编著
& M; a, F* q7 y1 a: k 海洋基础科学问题研究主要聚焦在?海洋科学的研究对象、知识体系、二级学科有哪些?| 《10000个科学难题(海洋卷)》全网独家首发
! T( {2 g5 F& l& c ►面向全球涉海专业研究生和青年学者开放申请!将于加拿大温哥华举办第7届IMBeR ‘ClimEco’系列暑期班 # l( |: G+ b- ^
►《地球系统与演变》白令海道开启和和北冰洋的演变 (附注:北冰洋大洋钻探 )| 汪品先院士:为地球系统科学正本清源 3 K- i) D0 A% x9 W! r$ T' i9 C* E0 F
►《10000个科学难题(海洋卷)》全网独家首发
, V& b' @' ]9 C: x ►我国西沙海域海洋浮标惨遭破坏,内部仪器丢失,基本确定是人为造成 | 何人所为?南海的 “黑洞”——越南海上民兵,需要提防…… 9 `2 E5 H1 |7 K

 8 ?. f/ ]/ w0 G" |8 [+ g% E
8 ?. f/ ]/ w0 G" |8 [+ g% E 海洋知圈
6 S8 B6 n% s8 {2 N v+ D" w 知晓海洋 | 探知海洋 2 l m; T2 N5 g, u
宣传海洋 | 服务海洋  ! f* i6 h2 F$ A: y; S% _
! f* i6 h2 F$ A: y; S% _ 
 C' s' c* D" q8 M# ` C' s' c* D" q8 M# `

9 T$ u" R" V i+ M, U/ t 如您喜欢,请点亮“在看” | 

