|
7 f! S5 L Q9 y. y 仿生软体机器人,或许会像无人机颠覆空战格局一般,成为海洋探测领域超越传统深潜机器人的霸主。
7 `! L5 [4 m# G! o 仿生机器鱼:海底1万米深,就这?|编辑制图来源 | 科普研习社 微信公众号 , O6 B8 f1 w/ i( V# j3 R# h: ^
作者 | 郭菲 烟台大学
& [3 B% o0 I* E6 k# K6 b: x6 Y/ ~ 海洋的深处有什么?在幽深的海底,各种奇特的生物引人遐想。但对于人类,深海探索长期以来都是工程技术领域的难题,各种人造结构想要抵御深海压力,就不得不首先具备厚重的承压外壳。
3 {: ?! W, Y( T8 J. A 不过,一群来自浙江大学和之江实验室的中国科学家却反其道而行之,他们从一种神奇的深海鱼类身上汲取设计灵感,制作了以柔性结构作为主体的深海机器人,它成功克服1000个大气压的极端高压,在10900米的世界最深海沟底部自在游动。
6 I+ R/ ^$ g; u$ Q7 ]0 P* o+ q 这项成就以封面报道的形式登上了2021年3月的《自然》杂志。
7 C( }9 Q' x( Q/ v7 ? 难以企及的海底最深处
. h; [% T5 |$ w- V: P- C4 E) z' I 由于探索困难,人类对深海知之甚少,这片广阔的领域实际上仍然是尚待开发的处女地。海洋地理学上把6000米以下深度的海洋称为超深渊带,这里物种的数量与多样性都无法和浅海地区相提并论。
8 ~) u1 @/ L2 e z, Y! v 1960年,人类的足迹首次达到地球洋底最深处——距离海平面10900米的马里亚纳海沟底部。这里的水压大约为103兆帕,相当于海平面大气压的1000倍。形象一点说,这个数值下的压强好比是一头北极熊站在一张邮票上,或者相当于一个人背着50架波音737客机。
; |/ @$ n$ A4 U0 e6 } 如此巨大的压力对于人类现有的工程设备而言是一个严酷挑战,因此传统的深海机器人和载人深潜器都具有厚重的外壳,即便如此,也仍然要冒着因材料或者结构缺陷造成外壳溃破的风险。正因为难度如此之高,人类突破深海与进军太空的时间,基本处于同一年代。 3 {" z" Q6 y( Y0 @
深海的巨大压力,对传统机器人和深潜器是严苛的挑战。|图虫创意狮子鱼,机器人的灵感来源
" V2 b2 J# C$ |* i2 m( X 不过,对于人类而言至难的伟业,对于深海鱼类来说却是稀松平常的事。目前,鱼类捕获深度的世界纪录保持者是一只神女底鼬鳚,它于1970年在波多黎各海沟8370米深处通过拖网方式被捕获。神女底鼬鳚在全球深海海域都有分布,但科学家在那之后一直未在8000米海域发现它的生存迹象。因此,这位世界纪录保持者很可能生活在更浅的水域,只不过是当时恰好被拖网带到了8370米深。 $ O7 R& w; S. R) o9 {+ j
真正日常栖息在8000米深处的鱼类,于2014年首次现身于人类的视野,就是当下深海生物界的当红炸子鸡——深海狮子鱼。它通体呈现粉白色,通常长度约为30厘米,体重约160克,样子看上去像一只巨大的蝌蚪。在马里亚纳海沟部分8000米深处的洋底,深海狮子鱼是食物链顶端的猎食者,平时以生活在洋底的甲壳类为食,在其所栖息的海域并不算是稀有物种。
! P+ d* M( j& \# j) V0 O; F; z$ ` 深海脊椎动物头号“抗压王”——狮子鱼。|维基百科深海狮子鱼的极限抗压能力令人咋舌,经过研究,其体内存在大量的胶状物质,这对于它们平衡内外压力具有重要作用。另外,它们的骨骼进化出了一些适应于深海压力环境的特征。除了保护大脑的一部分头骨,它的绝大多数骨骼皆为软骨,且骨骼衔接位置留有大量空隙,这些空隙可以极大地中和施加到骨骼上的压力。
- E& p) x7 j9 x, T+ n 挑战深海高压,仿生机器人以柔制刚
) @9 j' W6 B3 H+ s8 ~% S+ t- q3 i2 O 深海狮子鱼这一物种被发现后,短短数年间就引发了科学家的强烈兴趣,这其中既有致力于揭示其解剖结构和起源演化的生物学家,也有致力于利用其作为灵感来进行深潜机器人设计的工程学家。
' D8 z1 z* m" o1 j, c 该物种最早的发现人之一就曾在2018年利用3D打印技术制造了一只硅胶机器人版的深海狮子鱼。但这只机器鱼功能十分单一,而且设计它的最初目的还是为了研究深海狮子鱼的生理结构。
; a7 H3 `% Q, `5 U7 H2 C- K# v 3D打印制成的机器狮子鱼|@STACY FARINA AND M. GERRINGER/FRIDAY HARBOR LABS/UNIV. OF WASH.不过,这次中国科学家更好地借鉴了深海狮子鱼的过人之处,发展出了一种全新的深海机器人。
# e! S+ L4 B/ E& Y4 r% ] 其核心设计思想正是参考了深海狮子鱼适应深海的两大特征:第一,摒弃了笨重的抗压外壳,采用软质有机硅材料作为主要躯干,以柔克刚;第二,将各种电子部件均匀分散到身体各处,以实现最大限度的压力平衡,同时防止各组件在受到外壳变形后相互挤压失效。 ( O% ? }% E% N5 Y5 ? E K
这个仿生机器人的另一大亮点是拥有一对鱼鳍状的推进翼,扇动推进翼就能让机器人在海中前行。虽然这一设计同样借鉴于深海狮子鱼的两片胸鳍,但必须指出,后者的胸鳍其实并非起推进作用,它们的运动方式其实非常类似于蝌蚪。
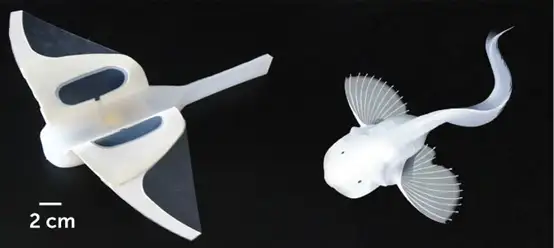
$ Q2 U2 h( _4 t2 P1 R* Z2 [. S9 H& O 仿生深潜机器人和其借鉴的对象(示意图)|LI ET AL/ NATURE 2021目前,该机器人已经在70米水深的湖中、3000米水深的南海,以及接近11000米的马里亚纳海沟底部进行了一系列实验。前两种情形下,机器人完成了仅依靠推进翼的自主游动,而在马里亚纳海沟完成的实验中,科学家们用深潜器的机械手将其进行了部分固定。
7 S, T4 {0 d$ |$ M A' j . L. F7 n& W' ^* R# `& z/ r
x# r8 A6 @$ @/ u3 ` W7 w
软体机器鱼和深海虾、硬质机械臂同框|LI ET AL/ NATURE 2021不过,该仿生机器人还存在至少两点尚待改进之处:首先,它的游速比同类深潜机器人慢的多;另外,它还没有足够的动力对抗激烈的海流。不过,学术界仍然对它的未来寄予厚望,作者总结称,“下一步的工作将专注于开发软体轻质的材料和结构,让用于极端条件下的装置具有更好的智能性、通用性、操纵性和效率”。 2 n, l- U$ Z3 r4 ]2 H$ W( e
未来,类似的仿生深海机器人不仅将拥有灵活运动的能力,还将具备多种本领,例如探测海水成分、拍摄深海生物照片及视频、收集样品并返回海面等。它们在成本上的显著优势,将很有可能像无人机颠覆空战格局一般,成为海洋探测领域超越传统深潜机器人的霸主。
1 l& A0 f9 B! \; f5 O/ c, ` 编辑 | 梁金 王晓非
) E$ i/ \' I2 x7 |. }* K$ V 责编 | 高佩雯
* G7 t4 t2 v5 h5 G5 k8 l& L- d! z 参考文献 # H4 l' b" M% w) u p
[1] https://www.nature.com/articles/d41586-021-00489-y 8 E- R) H# Q4 l7 N
[2] https://www.nature.com/articles/s41586-020-03153-z
: J( d, j5 w& g4 y' X: ?/ z w 文章由“科普研习社”(ID:cspbooks)公众号发布,转载请注明出处。
$ ^1 H, F4 a% L& B4 F
6 O+ x3 `4 P) a7 c/ e$ r& P# M; g( v: p
' h: I6 `/ j; p! L) ]
, J8 d5 o7 ~/ e0 ^
|