   fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) % n1 Y% {0 G* b7 | A2 H, k I % n1 Y% {0 G* b7 | A2 H, k I
йЈҺйҮҢйӣЁйҮҢпјҢжҲ‘еңЁиҝҷйҮҢзӯүдҪ пҪһ + D1 ]+ I+ f0 @" p3 I
ж—Ҙжң¬дёңдә¬еӨ§еӯҰжҸҗеҮәдёҖз§Қиҝңи·қзҰ»гҖҒеӨ§иҢғеӣҙжө·еә•жөӢз»ҳжҠҖжңҜпјҢйҮҮз”ЁеӨҡеҸ°иҮӘдё»жҪңиҲӘеҷЁпјҲAUVпјүдәӨжӣҝйҷҚиҗҪеңЁжө·еә•е®һзҺ°й«ҳзІҫеәҰеҜјиҲӘе’ҢжөӢз»ҳгҖӮ
* `6 c7 B$ V5 P6 U з ”з©¶дәәе‘ҳд»ҘеӣӣдёӘAUVпјҲAгҖҒBгҖҒCгҖҒDпјүдёәдҫӢпјҢAдёәиҝҗеҠЁAUVпјҢBдёәең°ж ҮAUVпјҢCгҖҒDдёәйҷ„еұһAUVгҖӮжү§иЎҢд»»еҠЎж—¶пјҢBе…ҲеҮәеҸ‘пјҢдёӢжҪң并жҸҗдҫӣдҪҚзҪ®дҝЎжҒҜпјӣд№ӢеҗҺAеҮәеҸ‘пјҢж №жҚ®BжҸҗдҫӣзҡ„дҝЎжҒҜе®ҡдҪҚпјӣAеңЁе®ҢжҲҗBе‘Ёеӣҙзҡ„жөӢз»ҳд»»еҠЎеҗҺпјҢйҷҚиҗҪеңЁжө·еә•пјҢеҜ№иҮӘиә«е®ҡдҪҚдҝЎжҒҜиҝӣиЎҢеӨ„зҗҶпјҢеҲ©з”ЁзІ’еӯҗж»ӨжіўеҮҸе°‘дҪҚзҪ®дј°з®—зҡ„дёҚзЎ®е®ҡжҖ§пјҢз”ЁиҒҡзұ»з®—жі•еҺӢзј©дҝЎжҒҜпјҢеҮҸе°‘дј иҫ“ж•°жҚ®йҮҸпјӣд№ӢеҗҺжҠҠе®ҡдҪҚдҝЎжҒҜдј иҫ“з»ҷBгҖҒCгҖҒDпјӣжңҖеҗҺAгҖҒBдәӨжҚўи§’иүІпјҢAдҪңдёәзҡ„ең°ж ҮAUVпјҢBдҪңдёәиҝҗеҠЁAUVејҖе§Ӣи®°еҪ•дҪҚзҪ®дҝЎжҒҜгҖӮжҢүз…§иҝҷз§Қж–№ејҸпјҢAгҖҒBдәӨжӣҝдҪңдёәең°ж ҮпјҢе…¶д»–дёүдёӘAUVиҝӣиЎҢжөӢз»ҳгҖӮиҝҷз§Қж–№жі•дёҚеҸ—е®ҡдҪҚи·қзҰ»е’ҢиҢғеӣҙзҡ„йҷҗеҲ¶пјҢеҸӘиҰҒиғҪжәҗе……и¶іпјҢеҚіеҸҜеҜ№еӨ§иҢғеӣҙжө·еҹҹиҝӣиЎҢй«ҳзІҫеәҰжөӢз»ҳгҖӮ " I( H1 O. N0 d( I) }! f( n) w
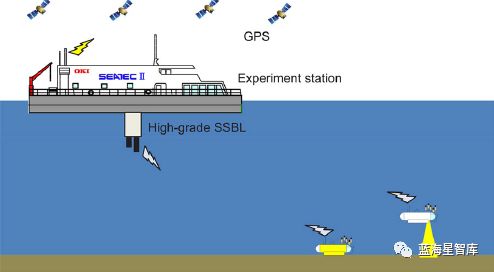
& z6 w% U1 z' r; U9 X+ V3 Z- O4 ` жөӢз»ҳиҜ•йӘҢи®ҫзҪ® * ?% [2 N$ M c q" _
иҝҷйЎ№з ”з©¶жҸҗеҮәзҡ„жөӢз»ҳж–№жі•пјҢиғҪдҪҝAUVеңЁжІЎжңүд»»дҪ•жө·йқўж”ҜжҢҒзҡ„жғ…еҶөдёӢпјҢејҖеұ•иҮӘдё»еӨ§иҢғеӣҙжө·еә•еӢҳжөӢпјҢеңЁжө·еә•жөӢз»ҳгҖҒиө„жәҗи°ғжҹҘгҖҒжҗңзҙўжІүиҲ№зӯүж–№йқўеә”з”Ёе№ҝжіӣгҖӮ 2 l6 g9 ?, Q# [
пјҲи“қжө·жҳҹпјү
( [2 \0 X1 ^) ^7 ~ ж–Үз« жҺЁиҚҗ 1 [+ v. `" G- J2 u& P0 A$ B% f
1 % s# ] _, v" Z: u" |! a7 U
иҜәж је…¬еҸёеұ•зӨәзҢҺйӣ·дёҺжө·еә•дҫҰеҜҹзі»з»ҹ : ^0 m. T: z, _, b6 |1 M: \8 @
2 $ u& I i1 k/ z& h6 T% U
д»ҝйҫҷиҷұеһӢи¶іејҸж°ҙдёӢжңәеҷЁдәәеҸҜе№ҝжіӣз”ЁдәҺжө·еә•зҺҜеўғеӢҳжҺўе’Ңжө…ж»©жҢҒз»ӯзӣ‘и§Ҷ
8 u' r0 m5 S7 t2 w2 [# P; t 3 % D. B6 R' w/ }* J3 w( \- U
DARPAжҺЁиҝӣвҖңе…ұдә«вҖқйЎ№зӣ®е’ҢвҖңжҲҳжңҜжө·еә•зҪ‘з»ңжһ¶жһ„вҖқйЎ№зӣ® " \$ {4 I' T) l$ S5 h' q' }
4
0 C) y. C* U! D. a' h дҝ„вҖңжіўеЎһеҶ¬вҖқж— дәәжҪңиҲӘеҷЁжөӢиҜ•е‘Ёжңҹе°Ҷдёә2е№ҙе·ҰеҸі
) k; t! A& V4 |5 h4 k. Z0 M 5 ; ]+ n, l/ P u9 M* k; O" {
зӢјзҫӨеҚіжқҘпјҢжү“зӢјжЈ’дҪ•еңЁпјҹвҖ”жө…жһҗж— дәәжҪңиҲӘеҷЁеҸ‘еұ•еҪұе“Қ
2 u- G' h& X2 f жғідәҶи§ЈжӣҙеӨҡеӣҪеӨ–еӣҪйҳІжҲҳз•ҘгҖҒеҶӣдәӢе·ҘдёҡгҖҒиЈ…еӨҮеҸ‘еұ•гҖҒеүҚжІҝжҠҖжңҜзӣёе…із ”究пјҢиҜ·е…іжіЁи“қжө·жҳҹжҷәеә“еҫ®дҝЎе…¬дј—еҸ·пјҡSICC_LHX 9 K8 o) W2 r7 B$ Y, W
ж¬ўиҝҺиҪ¬иҪҪпјҢиҪ¬иҪҪиҜ·жіЁжҳҺеҮәеӨ„гҖӮ 2 m* K5 A3 s, u- X1 b/ Z
q8 i. }1 K3 j9 N6 u
W5 W- Z, g- _
- V5 _8 }( Y& ]* b& h& S( D
& \; h$ j3 S4 H- Y+ ]" P1 a9 R3 O& W. [' O0 l0 P
| 

