|
5 A( x3 ^4 k* ~4 l 
! E) b1 b" w3 Q

# H; O& Q) P; r* t ж‘ҳ иҰҒпјҡеңЁж·ұж°ҙжІ№з”°жө·еә•йҮҮжІ№ж ‘зҡ„е®үиЈ…иҝҮзЁӢдёӯпјҢROV йҖҡиҝҮзӣ®и§ҶжЈҖжөӢгҖҒејҖ/е…ідә•еҸЈзӣ–гҖҒи·ҹиёӘ/зӣ‘и§ҶйҮҮжІ№ж ‘гҖҒеҚҸеҠ©йҮҮжІ№ж ‘дёҺдә•еҸЈжҲ–йҮҮжІ№ж ‘еӣһ收е·Ҙе…·дёҺйҮҮжІ№ж ‘еҜ№жҺҘгҖҒи°ғж•ҙйҮҮжІ№ж ‘ж–№дҪҚгҖҒй”Ғзҙ§/и§Јй”ҒгҖҒеҺӢеҠӣжөӢиҜ•зӯүеҮ дёӘжӯҘйӘӨпјҢе®үе…Ёеҝ«йҖҹзҡ„е®ҢжҲҗж·ұжө·жө·еә•йҮҮжІ№ж ‘зҡ„е®үиЈ…гҖӮеҜ№дәҺе®үиЈ…иҝҮзЁӢдёӯзҡ„зј з»•е’ҢиҜҜж“ҚдҪңйЈҺйҷ©з»ҷеҮәдәҶи§ЈеҶіж–№жі•гҖӮ
/ p. D2 z9 Y6 V0 D9 b% ~ йҡҸзқҖжө·дёҠзҹіжІ№ејҖеҸ‘зҡ„йҖҗжӯҘж·ұе…ҘпјҢжө·дёҠжІ№ж°”з”°зҡ„ејҖеҸ‘гҖҒе»әи®ҫе·Із»Ҹд»Һжө…ж°ҙеҢәжү©еұ•еҲ°дәҶ 3000m зҡ„ж·ұж°ҙеҢәгҖӮжҪңж°ҙе‘ҳз”ұдәҺеҸ—еҲ°дҪңдёҡж°ҙж·ұзҡ„йҷҗеҲ¶пјҢеңЁж·ұж°ҙж°ҙдёӢе®үиЈ…дҪңдёҡдёӯйҡҫд»ҘеҸ‘жҢҘдҪңз”ЁпјҢиҖҢж°ҙдёӢйҒҘжҺ§жңәеҷЁдәәпјҲROVпјүд»Ҙе…¶дҪңдёҡж°ҙж·ұеӨ§гҖҒе®үе…ЁгҖҒй«ҳж•Ҳзӯүзү№зӮ№еңЁжө·жҙӢзҹіжІ№ејҖеҸ‘йўҶеҹҹеҫ—еҲ°е№ҝжіӣеә”з”ЁпјҢ并еҸ‘еұ•иҝ…зҢӣпјҢROV е·Із»ҸжҲҗдёәж·ұжө·жІ№ж°”з”°ејҖеҸ‘дёҚеҸҜжҲ–зјәзҡ„е·Ҙе…·гҖӮж·ұжө·жІ№ж°”з”°зҡ„ејҖеҸ‘жЁЎејҸдёҖиҲ¬йҮҮз”Ёж°ҙдёӢз”ҹдә§зі»з»ҹпјҲSubsea Production SystemпјүеӨ–еҠ жө®ејҸз”ҹдә§еӮЁжІ№и®ҫж–ҪпјҲFPSOпјүиҝӣиЎҢејҖеҸ‘гҖӮиҖҢж°ҙдёӢйҮҮжІ№ж ‘жҳҜжІ№з”°ж°ҙдёӢз”ҹдә§зі»з»ҹзҡ„ж ёеҝғиЈ…еӨҮгҖӮз”ұдәҺжө·еә•зҺҜеўғжҜ”иҫғеӨҚжқӮпјҢеҰӮдҪ•е®үе…Ёеҝ«йҖҹзҡ„е®ҢжҲҗйҮҮжІ№ж ‘зҡ„е®үиЈ…жҳҜйңҖиҰҒи§ЈеҶізҡ„й—®йўҳпјҢжң¬ж–ҮеҹәдәҺеҚ—жө·ж·ұж°ҙжІ№з”°ејҖеҸ‘зҡ„е·ҘзЁӢе®һи·өпјҢз®ҖиҰҒз»ҷеҮәдәҶ ROV еҚҸеҠ©йҮҮжІ№ж ‘е®үиЈ…зҡ„ж–№жі•е’ҢжӯҘйӘӨгҖӮ + J; h7 n* I; q8 Q: I1 r. p
1 ROVеҸҠйҮҮжІ№ж ‘з®Җд»Ӣ ! i; G: j9 H" ]
ROV зі»з»ҹеҸҜз®ҖеҚ•еҲҶжҲҗ ROV жҺ§еҲ¶зі»з»ҹгҖҒ收ж”ҫзі»з»ҹгҖҒROV жҪңеҷЁдёүйғЁеҲҶгҖӮдҫқз…§ IMCAпјҲеӣҪйҷ…жө·дәӢжүҝеҢ…е•ҶеҚҸдјҡпјүж ҮеҮҶпјҢROVжҢүе…¶дҪңдёҡиғҪеҠӣеҸҜеҲҶжҲҗи§ӮеҜҹзә§гҖҒеҮҶе·ҘдҪңзә§гҖҒе·ҘдҪңзә§гҖҒжӢ–жӣіеһӢеҸҠе…¶е®ғзү№з§Қз”ЁйҖ” ROV зӯүдә”дёӘзә§еҲ«гҖӮеңЁж°ҙдёӢйҮҮжІ№ж ‘е®үиЈ…гҖҒз»ҙжҠӨиҝҮзЁӢдёӯпјҢйҖҡеёёдҪҝз”Ёзҡ„жҳҜе·ҘдҪңзә§ ROVгҖӮиҜҘзұ»еһӢ ROV еҠҹзҺҮиҫғеӨ§гҖҒиҙҹиҪҪиғҪеҠӣиҫғејәпјҢеҸҜж №жҚ®дҪңдёҡйңҖиҰҒжҗӯиҪҪеҗ„зұ»дё“з”Ёж°ҙдёӢи®ҫеӨҮе’Ңе·Ҙе…·гҖӮ常规зҡ„ ROV зі»з»ҹи§ҒдёӢеӣҫ 1. 0 e- Y- H1 p" j1 `

6 s6 O1 Q2 @. y) H# D3 O! H3 | ж°ҙдёӢйҒҘжҺ§жңәеҷЁдәәдёҺжҪңж°ҙе‘ҳзӣёжҜ”пјҢеңЁж·ұж°ҙдҪңдёҡж–№йқўдҪңдёҡж—¶й—ҙдёҚеҸ—йҷҗеҲ¶пјӣеңЁж°ҙйқўжҺ§еҲ¶еҚ•е…ғйҒҘжҺ§ж“ҚдҪңпјҢдҪңдёҡзҺҜеўғе®үе…ЁпјӣдҪңдёҡж·ұеәҰеҸҜиҫҫ 3000m д»ҘдёҠпјӣж°ҙдёӢдҪңдёҡеҠҹзҺҮеӨ§пјҢеҸҜд»Ҙе®ҢжҲҗжҪңж°ҙе‘ҳж— жі•е®ҢжҲҗзҡ„е·ҘдҪңпјӣж°ҙдёӢдҪңдёҡиҢғеӣҙеӨ§пјӣж”ҜжҢҒи®ҫеӨҮе°‘пјҢж“ҚдҪңз»ҙжҠӨиҫғйҘұе’ҢжҪңж°ҙз®ҖдҫҝгҖӮ
, c% z3 _. `+ }! s& F* Q) r8 L* a ж°ҙдёӢйҮҮжІ№ж ‘жҳҜдёҖз§Қз”ЁдәҺжҺ§еҲ¶е’Ңи°ғиҠӮжІ№дә•з”ҹдә§пјҢ并дёәй’ўдёқпјҢз”өзјҶпјҢиҝһз»ӯжІ№з®Ўзӯүдҝ®дә•дҪңдёҡжҸҗдҫӣжқЎд»¶зҡ„дёҖз§ҚиЈ…зҪ®гҖӮж°ҙдёӢйҮҮжІ№ж ‘жҢүз…§е…¶з»“жһ„еҪўејҸеҸҜеҲҶдёәдёӨзұ»пјҡеһӮзӣҙеһӢе’Ңж°ҙе№іеһӢгҖӮеңЁж·ұж°ҙжө·еҹҹдҪҝз”Ёзҡ„йғҪжҳҜж°ҙе№іеһӢж°ҙдёӢйҮҮжІ№ж ‘пјҢи§ҒдёӢеӣҫ 2гҖӮиҜҘзұ»еһӢйҮҮжІ№ж ‘зҡ„з»“жһ„и®ҫи®ЎеҜ№дәҺ ROV дҪңдёҡжқҘиҜҙиҫғдёәеҸӢеҘҪпјҢж–№дҫҝ ROV йҖҡиҝҮжңәжў°жүӢжҲ–иҖ…жүӯеҠӣе·Ҙе…·е®һзҺ°еҜ№йҮҮжІ№ж ‘зҡ„йҳҖй—Ёзҡ„жҺ§еҲ¶гҖӮ
& o+ ~' C2 }) F' ~% N6 i$ L 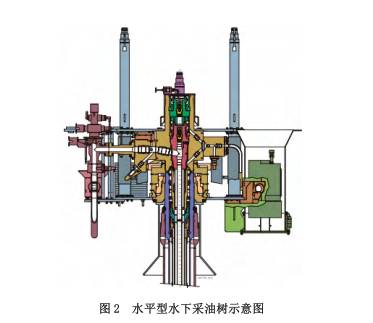
9 v1 j: g1 S7 T+ [" W. p1 b
2 ROVе®үиЈ…йҮҮжІ№ж ‘ж–№жі• 3 f0 n/ r3 B7 ~( p) Z) M4 N# V
еңЁйҮҮжІ№ж ‘зҡ„е®үиЈ…иҝҮзЁӢдёӯпјҢROV е·ҘдҪңжөҒзЁӢеҸҜд»ҘеҲҶдёәзӣ®и§ҶжЈҖжөӢгҖҒејҖ/е…ідә•еҸЈзӣ–гҖҒи·ҹиёӘ/зӣ‘и§ҶйҮҮжІ№ж ‘гҖҒеҚҸеҠ©йҮҮжІ№ж ‘дёҺдә•еҸЈжҲ–йҮҮжІ№ж ‘еӣһ收е·Ҙе…·дёҺйҮҮжІ№ж ‘еҜ№жҺҘгҖҒи°ғж•ҙйҮҮжІ№ж ‘ж–№дҪҚгҖҒй”Ғзҙ§/и§Јй”ҒгҖҒеҺӢеҠӣжөӢиҜ•зӯүеҮ дёӘжӯҘйӘӨгҖӮеҜ№е·ҘдҪңиҝҮзЁӢдёӯеҸҜиғҪеӯҳеңЁзҡ„йЈҺйҷ©иҝӣиЎҢдәҶиҫЁиҜҶпјҢ并з»ҷеҮәдәҶи§ЈеҶіж–№жі•гҖӮ
6 u& q; ?& s+ Y; @7 p 2.1 зӣ®и§ҶжЈҖжөӢ 5 B; V/ F4 Z9 e! g* i
ROV жҢүз…§иҰҒжұӮеҜ№ж°ҙдёӢйҮҮжІ№ж ‘жҲ–дә•еҸЈз»“жһ„иҝӣиЎҢзӣ®и§ҶжЈҖжөӢпјҢд»ҘзЎ®е®ҡзӣ®ж ҮеҜ№иұЎеҸҠе…¶йҷ„иҝ‘жө·еә•жІЎжңүйҡңзўҚзү©пјҢиӢҘжңүеҸҜиғҪеҪұе“ҚеҲ°йҮҮжІ№ж ‘еӣһ收жҲ–е®үиЈ…зҡ„йҡңзўҚзү©пјҢеҲҷдҪҝз”Ё ROV жңәжў°жүӢжҲ–иҖ…иҲ№иҲ¶еҗҠжңәе°ҶйҡңзўҚзү©жё…йҷӨпјӣеңЁжүҖжңүе®үиЈ…йЎ№зӣ®з»“жқҹеҗҺпјҢROV д№ҹе°ҶеҜ№йҮҮжІ№ж ‘еҒҡдёҖдёӘе…Ёйқўзҡ„зӣ®и§ҶжЈҖжҹҘ并еҪ•еғҸпјҢд»ҘзЎ®и®ӨйҮҮжІ№ж ‘зҠ¶жҖҒиүҜеҘҪпјҢ并且дҝқиҜҒйҷ„иҝ‘жө·еә•жІЎжңүжқӮзү©йҒ—з•ҷгҖӮ 0 K5 w; f& ^8 Z6 k1 o
2.2 ејҖ/е…ідә•еҸЈзӣ–
$ P" {) B4 V+ _: e йҮҮжІ№ж ‘е®үиЈ…еүҚпјҢROV дҪҝз”Ёжңәжў°жүӢе°Ҷдә•еҸЈзӣ–еҸ–дёӢпјҢж”ҫзҪ®еңЁдә•еҸЈеҹәзӣҳйҷ„иҝ‘пјӣйҮҮжІ№ж ‘е®үиЈ…е®ҢжҲҗеҗҺпјҢROV еҶҚе°Ҷдә•еҸЈзӣ–移иҮійҮҮжІ№ж ‘дә•еҸЈеӨ„гҖӮ / m3 k7 A$ U( [6 s
2.3 и·ҹиёӘ/зӣ‘и§ҶйҮҮжІ№ж ‘жҲ–еҗҠй’©
( L5 A6 `$ u( A9 R йҮҮжІ№ж ‘еңЁж°ҙдёӢиө·еҚҮгҖҒдёӢж”ҫе’Ңе®үиЈ…иҝҮзЁӢдёӯпјҢдёәдҝқйҡңйҮҮжІ№ж ‘зҡ„е®үе…ЁпјҢROV йңҖиҰҒеҖҹеҠ©дәҺж‘„еғҸеӨҙжҲ–еЈ°зәіе…ЁзЁӢеҜ№зӣ®ж Үзү©иҝӣиЎҢи·ҹиёӘгҖҒи§ӮеҜҹгҖӮ 3 v5 [0 t* T/ T6 w: H
2.4 еҚҸеҠ©йҮҮжІ№ж ‘дёҺдә•еҸЈеҜ№жҺҘ - a1 Z' l4 d) D. t4 [
TRT дёҺйҮҮжІ№ж ‘еҜ№жҺҘгҖҒйҮҮжІ№ж ‘дёҺдә•еҸЈеҜ№жҺҘиҝҮзЁӢдёӯпјҢеҗҠжңәзҡ„еҗҠиҮӮдҪҚзҪ®дҝқжҢҒдёҚеҸҳпјҢдёҖиҲ¬йҖҡиҝҮи°ғж•ҙиҲ№дҪҚе’Ң收ж”ҫеҗҠжңәй’ўдёқе®һзҺ°дәҢиҖ…зҡ„еҜ№жҺҘгҖӮеҜ№жҺҘдҪңдёҡж—¶еҖҹеҠ© ROV д»ҺдёҚеҗҢи§’еәҰи§ӮеҜҹдәҢиҖ…д№Ӣй—ҙзҡ„зӣёеҜ№дҪҚзҪ®пјҢиҲ№иҲ¶ж“Қзәөдәәе‘ҳдҫқжҚ® ROV ж“ҚдҪңдәәе‘ҳжҸҗдҫӣзҡ„дҪҚзҪ®еҸӮж•°еҜ№и°ғж•ҙиҲ№дҪҚпјҢзӣҙиҮідәҢиҖ…йЎәеҲ©еҜ№жҺҘгҖӮдёәеҮҸе°‘еҜ№жҺҘж—¶й—ҙгҖҒжҸҗй«ҳе·ҘдҪңж•ҲзҺҮгҖҒйҷҚдҪҺзў°ж’һйЈҺйҷ©пјҢйҖҡеёёдҪҝз”ЁдёӨеҸ° ROV еҗҢж—¶дҪңдёҡгҖӮ 0 T1 o+ z: i! @
2.5 и°ғж•ҙйҮҮжІ№ж ‘ж–№дҪҚ 7 h7 p% P2 h& d, I1 O2 r
йҮҮжІ№ж ‘дёҺдә•еҸЈеҜ№жҺҘд№ӢеҗҺпјҢеңЁе…¶еӣәе®ҡеүҚйңҖиҰҒжҢүз…§и®ҫи®ЎиҰҒжұӮи°ғж•ҙйҮҮжІ№ж ‘зҡ„ж–№еҗ‘пјҢд»Ҙж–№дҫҝе®үиЈ…йҮҮжІ№ж ‘дёҺе…¶д»–жө·еә•з»“жһ„зү©д№Ӣй—ҙзҡ„иҝһжҺҘз®ЎжұҮгҖӮROV дёҠжҗӯиҪҪжңүдёҖдёӘдё“з”Ёзҡ„ж¶ІеҺӢй©ұеҠЁиЈ…зҪ®пјҢеҸҜ
; ^; h- b1 R, _ д»ҘдҪҝ ROV дёҺйҮҮжІ№ж ‘е®һзҺ°еҲҡжҖ§еҜ№жҺҘпјҢROV е’ҢйҮҮжІ№ж ‘еҜ№жҺҘеҘҪд№ӢеҗҺдҪҝз”Ё ROV жҺЁеҠЁйҮҮжІ№ж ‘еңЁдә•еҸЈдёҠиҪ¬еҠЁиҮіиҰҒжұӮзҡ„ж–№еҗ‘гҖӮеңЁдҪңдёҡиҝҮзЁӢдёӯеҸҰеӨ–дёҖеҸ° ROV еңЁйҷ„иҝ‘и§ӮеҜҹ ROV дёҺйҮҮжІ№ж ‘зҡ„дҪҚзҪ®еҸҳеҢ–жғ…еҶөгҖӮ ; O7 x; o: [( k; v: }; a
2.6 й”Ғзҙ§/и§Јй”Ғ
5 m3 s( j+ ? ?4 A& ] йҮҮжІ№ж ‘и°ғж•ҙеҲ°дҪҚд№ӢеҗҺпјҢROV дҪҝз”ЁеўһеҺӢжіөе’ҢжіЁж¶ІеҷЁеҫҖйҮҮжІ№ж ‘е’ҢйҮҮжІ№ж ‘еӣһ收系з»ҹзҡ„й”Ғзҙ§иЈ…зҪ®еҶ…жіЁе…Ҙж¶ІдҪ“пјҢжҺ§еҲ¶йҮҮжІ№ж ‘й”Ғзҙ§иЈ…зҪ®пјҢе°ҶйҮҮжІ№ж ‘е’ҢйҮҮжІ№ж ‘еӣһ收系з»ҹй”Ғзҙ§жҲ–и§Јй”ҒгҖӮ l7 H+ s/ K+ K8 ~
2.7 еҺӢеҠӣжөӢиҜ• % \& P- v0 Z4 D& }+ s" q& w
йҮҮжІ№ж ‘е®үиЈ…е®ҢжҲҗеҗҺпјҢйңҖеҜ№йҮҮжІ№ж ‘еҶ…йғЁз®ЎжұҮиҝӣиЎҢеҺӢеҠӣжөӢиҜ•гҖӮROV дҪҝз”ЁеўһеҺӢжіөе’ҢжіЁж¶ІеҷЁеҫҖйҮҮжІ№ж ‘еҶ…еҠ еҺӢпјҢжөӢиҜ•еҺӢеҠӣйҖҡеёёдёә 5000psiгҖӮжөӢиҜ•иҝҮзЁӢдёӯпјҢROV и§ӮеҜҹеҺӢеҠӣиЎЁзӣ‘и§ҶеҺӢеҠӣеҸҳеҢ–жғ…еҶөпјҢиӢҘ规е®ҡж—¶й—ҙеҶ…еҺӢеҠӣжІЎжңүеҮәзҺ°жҳҺжҳҫдёӢйҷҚеҚіиЎЁзӨәеҺӢеҠӣжөӢиҜ•жҲҗеҠҹпјҢйҮҮжІ№ж ‘е®үиЈ…д№ҹеҹәжң¬е®ҢжҲҗгҖӮ ' z+ R. _) z# A! x: {8 M# o
2.8 йЈҺйҷ©иҫЁиҜҶ : q V( S; r1 G+ i7 ^0 I. V K {3 `% y
ROV еңЁйҮҮжІ№ж ‘е®үиЈ…ж”ҜжҢҒдҪңдёҡж—¶пјҢеӯҳеңЁзқҖеӨҡз§ҚйЈҺйҷ©пјҢеҰӮдҪ•и®ӨиҜҶе’Ң规йҒҝиҝҷдәӣйЈҺйҷ©е°ӨдёәйҮҚиҰҒпјҢдёҚд»…еҸҜд»ҘйҷҚдҪҺ ROV и®ҫеӨҮжҚҹеқҸзҺҮпјҢиҝҳеҸҜд»ҘзӣҙжҺҘжҸҗй«ҳйҮҮжІ№ж ‘е®үиЈ…е·ҘдҪңзҡ„дҪңдёҡж•ҲзҺҮгҖӮ ; ]: v) t, i9 o; q# A j+ v9 n
2.8.1 зј з»•
" Q, L2 f1 L* P: D8 b2 P йҮҮжІ№ж ‘е®үиЈ…дҪңдёҡж—¶пјҢдёәжҸҗй«ҳе·ҘдҪңж•ҲзҺҮгҖҒзј©зҹӯжө·дёҠдҪңдёҡж—¶й—ҙпјҢжңүж—¶дјҡдҪҝз”ЁдёӨеҸ° ROV еҗҢж—¶дёӢж°ҙдҪңдёҡпјҢеӨ§еӨ§жҸҗй«ҳдәҶ ROVи„җеёҰзјҶд№Ӣй—ҙзј з»•зҡ„йЈҺйҷ©гҖӮ
- y4 R; e3 D: n дёәйҷҚдҪҺи„җеёҰзјҶзј з»•зҡ„йЈҺйҷ©пјҢROV ж“ҚдҪңдәәе‘ҳдёҚд»…иҰҒжё…жҘҡиҮӘе·ұжүҖжҺ§еҲ¶ ROV е’Ң TMS зҡ„дҪҚзҪ®пјҢиҝҳиҰҒжё…жҘҡеҸҰеӨ–дёҖеҸ° ROV е’Ң TMSзҡ„дҪҚзҪ®гҖӮжӯӨеӨ–пјҢдҝқжҢҒдёӨдёӘ ROV дҪңдёҡе°Ҹз»„д№Ӣй—ҙйҖҡи®Ҝз•…йҖҡгҖҒеҸҠж—¶д№ҹеҸҜд»Ҙжңүж•ҲеҮҸе°‘зј з»•йЈҺйҷ©гҖӮ ! |0 H6 e2 Q0 W7 [, D
2.8.2 иҜҜж“ҚдҪң
, y3 G- l* {2 E0 l A( i' j ж°ҙдёӢйҮҮжІ№ж ‘з»“жһ„иҫғдёәеӨҚжқӮпјҢROV дҪңдёҡдәәе‘ҳеҸҜиғҪз”ұдәҺеҜ№йҮҮжІ№ж ‘з»“жһ„дёҚзҶҹиҖҢеҜјиҮҙиҜҜејҖе…іжҲ–ејҖй”ҷйҳҖй—Ёзӯүй”ҷиҜҜж“ҚдҪңпјҢеҸҜиғҪеј•еҸ‘йҮҚеӨ§дәӢж•…гҖӮ 2 V( k0 ?: e" W, J
дҪңдёҡеүҚеҠ ејә ROV дҪңдёҡдәәе‘ҳдҪңдёҡеүҚзҡ„еҹ№и®ӯе·ҘдҪңпјҢдҪҝд№ӢдәҶи§ЈйҮҮжІ№ж ‘зҡ„еҹәжң¬з»“жһ„е’Ңзү№зӮ№еҸҠж–Ҫе·ҘжөҒзЁӢпјӣдҪңдёҡиҝҮзЁӢдёӯпјҢеҗ¬д»ҺзҺ°еңәйҮҮжІ№ж ‘е·ҘзЁӢеёҲзҡ„жҢҮжҢҘпјҢдёҘж јжҢүжҢҮд»Өж“ҚдҪңеҸҜд»Ҙ规йҒҝиҜҜж“ҚдҪңгҖӮ
% `8 n7 G# g/ _) V) ]1 _( @ 3 жҖ»з»“ 2 K5 \8 k3 B0 i7 ~! c
йҡҸзқҖж·ұжө·жІ№ж°”з”°ејҖйҮҮдёҡеҠЎзҡ„йҖҗжӯҘж·ұе…Ҙе’Ң ROV жҠҖжңҜзҡ„еҸ‘еұ•пјҢROV еңЁж·ұж°ҙжІ№ж°”з”°ејҖеҸ‘е’ҢеҗҺжңҹз»ҙжҠӨз®ЎзҗҶдёӯзҡ„еә”з”Ёд№ҹж„ҲеҠ е№ҝжіӣгҖӮжң¬ж–ҮжүҖжҸҗеҮәзҡ„ ROV дҪҝз”Ёж–№жі•д№ҹеҸҜд»Ҙдёәе…¶д»–ж°ҙдёӢз»“жһ„зү©зҡ„е®үиЈ…жҸҗдҫӣеҸӮиҖғгҖӮпјҲдҪңиҖ…пјҡ дёӯжө·жІ№з”°жңҚеҠЎиӮЎд»Ҫжңүйҷҗе…¬еҸё жұӘйӣ· | жө·жҙӢжІ№ж°”зҪ‘ж•ҙзҗҶеҸ‘еёғпјү
. p* o* _& L" `. U8 F# ~" U  е…ідәҺж°ҙдёӢз”ҹдә§зі»з»ҹжҠҘе‘ҠпјҲ е…ідәҺж°ҙдёӢз”ҹдә§зі»з»ҹжҠҘе‘ҠпјҲ
' ~4 ~7 P4 P2 i: t еҗ‘дёҠж»‘еҠЁйҳ…и§Ҳпјү
: g1 w6 C; w% K. v. x( N8 f иҮӘ5жңҲеә•жҲ‘们еҜ№еӨ–еҸ‘еёғжӢҹзј–еҲ¶гҖҠ2017жө·дёҠжІ№ж°”з”°ж°ҙдёӢз”ҹдә§зі»з»ҹе…ій”®и®ҫеӨҮе’ҢжҠҖжңҜжҠҘе‘ҠгҖӢзҡ„ж¶ҲжҒҜд»ҘжқҘпјҢйҷҶз»ӯ收еҲ°еӨҡж–№зҡ„е’ЁиҜўе’ҢеҸҚйҰҲгҖӮеҰӮд»ҠпјҢиҝҷд»ҪеҺҶж—¶еӣӣдёӘжңҲгҖҒз”ұзҫҺеӣҪзҡ„е’ЁиҜўеӣўйҳҹд»ҘеҸҠеӨҡдҪҚзү№йӮҖиЎҢдёҡ专家зІҫеҝғжү“йҖ зҡ„еӣҪеҶ…е”ҜдёҖзҡ„е…ідәҺж°ҙдёӢз”ҹдә§зі»з»ҹдё“дёҡжҠҘе‘ҠеҚіе°Ҷй—®дё–гҖӮзӣ®еүҚиҜҘжҠҘе‘Ҡзҡ„еҶ…е®№зј–еҲ¶е·Із»Ҹе®ҢжҲҗпјҢе°ҶеңЁеӣҪеәҶиҠӮеҗҺдёҖе‘ЁеҶ…жӯЈејҸеҮәзүҲеҸ‘иЎҢгҖӮе·Ійў„и®ўзҡ„жңӢеҸӢжҲ‘们е°ҶеңЁеҮәзүҲеҗҺзҡ„第дёҖж—¶й—ҙе®үжҺ’йӮ®еҜ„пјҢиҝҳжңүжғійў„е®ҡзҡ„жңӢеҸӢиҜ·зӮ№еҮ»д»ҘдёӢй“ҫжҺҘиҺ·еҸ–йў„е®ҡж–№ејҸпјҡ ) h0 S" `9 Q) ]% F/ P8 q
йҷҗйҮҸеҸ‘е”® | иҝҷд»ҪжҠҘе‘ҠеҮӯд»Җд№Ҳз§°дёәиЎҢдёҡеҶ…第дёҖжүӢжқҗж–ҷпјҹ
2 G* c, C; z h- S# _* z( s иҜҘж¬ҫжҠҘе‘Ҡжңүиҝ‘дә”дёҮеӯ—пјҢдёҚд»…иҜҰз»Ҷйҳҗиҝ°дәҶж°ҙдёӢз”ҹдә§зі»з»ҹе…ій”®и®ҫеӨҮе’ҢжҠҖжңҜзҡ„зӣёе…ізҹҘиҜҶпјҢе°ұзҺ°йҳ¶ж®өе…Ёзҗғдё»иҰҒж°ҙдёӢйЎ№зӣ®иҝӣиЎҢд»Ӣз»ҚпјҢжӣҙй’ҲеҜ№дёҚеҗҢең°еҢәзҡ„ж°ҙдёӢз”ҹдә§и®ҫеӨҮеёӮеңәжңӘжқҘзҡ„еҸ‘еұ•и¶ӢеҠҝиҝӣиЎҢдәҶеҲҶжһҗгҖӮзңҹиҜҡеёҢжңӣиҝҷд»ҪжҠҘе‘ҠиғҪж»Ўи¶іеӨ§е®¶зҡ„жңҹеҫ…пјҒ
8 G# ]6 m3 a+ {1 t 
; n/ g; }. S {1 ^! l. k4 N e
( ~" P/ U" V& h* u% f7 d- r. f* W+ p
( \8 }4 T( h" r, e( {6 l! b0 a7 S
! L) P$ v# u3 A
7 W* k Y9 r: Y% _+ L) |2 f | 

