|
" G1 F" ~+ n! s; h( X3 Y
4 h$ M6 X& |/ T
《追风筝的人》
' T+ G y' f/ r' Z “为你,千千万万遍”
$ u* d f8 v4 j6 k) N: _5 _ 静静地蜷在床角捧着这本书。阿米尔终于有勇气追寻那只折射着人性光辉的风 % U& s; F" G1 \% _
李一平
7 m$ l- b8 h J# b; c' [# p7 X9 d 1. 中国科学院沈阳自动化研究所机器人学国家重点实验室;2. 中国科学院机器人与智能制造创新研究院;3.辽宁省水下机器人重点实验室 z+ r0 F Z) b( D3 t/ l- J
- b+ e; I4 d* {$ o' m& m% O' K . r/ r, |" z; G& L* a- o
; B* x3 M" p O3 A8 {" D* I : O1 z C, _( [1 C0 H0 z- ?
1.自主/遥控水下机器人 - ]4 P4 ? K: [: ~
海洋对人类而言是神秘和未知的领域,人类对它的探索从未停止过。水下机器人(UUV)作为人类认识和开发海洋的重要手段之一,其在海洋科学及工程中的应用日益受到广泛关注。通常我们说的水下机器人,是指“能在水中浮游或在海底行走、具有观察能力和使用机械手或其他工具进行水下作业的装置”。水下机器人分为两类,一类是遥控水下机器人(ROV),一类是自主水下机器人(AUV)。 + A2 Y3 |' W. `# q6 o* i3 ?, \
4 r' J$ k. Q( ~8 R! i 图1 水下机器人分类 6 }; `; z$ T% t
遥控和自主这两类水下机器人的主要差异在于操作模式,遥控水下机器人是操作者通过电缆进行操作,自主水下机器人则是用计算机代替操作者进行操作。
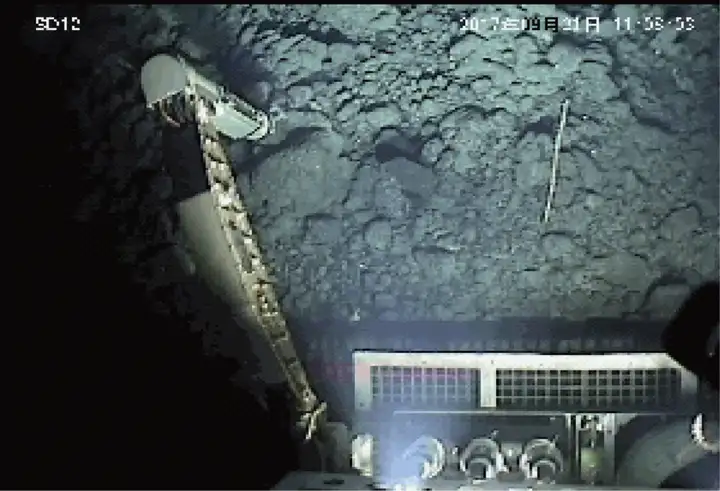
: ~+ Y7 v. O5 R7 U ROV携带有一根长电缆,通过这根电缆传送能源和信号,操作者通过这根电缆对机器人进行遥控操作。ROV的优点是可以在一个小范围内精细的观测,可以带机械手和作业工具在海底进行精细取样作业,比如采集岩石、海底沉积物,收集失落在海底的物体,取水样、泥样等。但由于电缆长度的限制,其航行的范围是有限的。
" |; e, B8 E# U- g
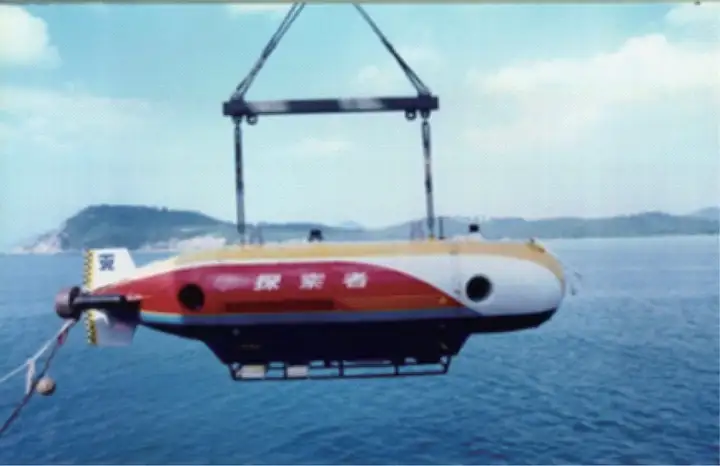
p% P9 s8 x6 C 图2 遥控水下机器人ROV
" ]# y# H7 z" k8 e7 R1 x+ f 1 v' u$ a) u9 K( o2 [1 m( a5 d% N; o. r
图3 ROV机械手在海底采集岩石样品
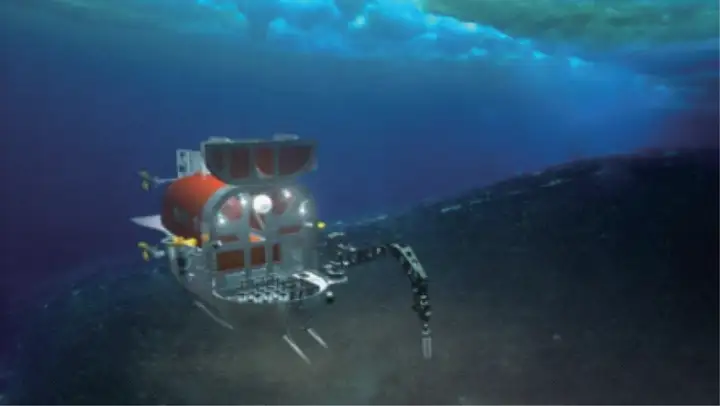
" q6 p# Q8 ~+ I AUV没有携带电缆,它的能源(电池)安装在机器人体内,其任务执行过程是由计算机控制的,机器人按照程序自主的完成任务。由于没有电缆的约束,它可以去更远的地方,返回后再对数据进行收取和分析。由于携带的能源有限,通常我们把AUV外形设计成流线型,以减小航行阻力,使它航行时间更长。AUV的特点是自主航行,可实现大范围观测(探测)。
& {+ A: [% g- k! F/ w
$ S6 X3 x$ U; h 图4 自主水下机器人AUV
) G% o( a H w 世界水下机器人发展的历史有60 年了,经历了从载人到无人,从遥控到自主的主要阶段。加拿大国际潜水器工程公司(ISE)总裁麦克·法兰将水下机器人的发展历史分为四个阶段,并将前三个阶段称为三次革命:第一次革命在20 世纪60年代,以载人潜水器为标志。第二次革命为70 年代,以遥控水下机器人的迅速发展成为一个成熟的产业为特征。第三次革命在20 世纪90 年代,以自主水下机器人的发展和走向成熟为标志。现在则是混合型水下机器人的时代。由于任何一类水下机器人都有其局限性,为了应对不同的使命要求,使用不同类型/技术构成新的水下机器人系统,是当前发展的主要趋势。 * E2 }% ?& `; R" r2 v5 S$ y5 Z
混合式水下机器人是近十几年来发展起来新型机器人系统,在国际上还没有一个统一的定义或名称。目前,有两种混合式水下机器人研制成功并得到应用:一种是AUV和水下滑翔机技术结合形成的,我们称之为混合式AUV或混合驱动的水下滑翔机。另一种是采用AUV和ROV技术结合形成的,叫自主/遥控水下机器人(ARV)。 * p# n- _( p4 @) n o5 `/ W
通常混合式水下机器人是两种机器人优势的组合,因此,它兼顾了二者的优点,以弥补一方的不足。ARV结合了AUV和ROV的特点,既可以作为AUV使用,进行较大范围的水下调查,也可以作为ROV使用,进行局部区域的精确调查和水下轻作业。 0 m. l- `$ s, E8 m' [3 c! T
典型的ARV系统自带能源,并携带光纤微缆,具有自主、遥控、半自主等不同作业模式,可实现区域搜索、定点观测以及水下轻作业,是一种理想的海洋探测和作业平台。
7 n+ K0 K( M$ E 与AUV相比,ARV不仅实现了实时数据交互,还可以完成水下轻作业,提升了机器人的作业能力;与ROV相比,由于其可携带长距离光纤微缆,不仅扩大了水下作业范围,降低了对支持母船的要求,也减少了水面支持系统的体积和重量。ARV的这些特性是单一AUV或ROV不能全部拥有的,二者的结合,使得一些复杂的海洋观测和作业应用成为可能。 / C* U d" d/ c7 N, l6 p( X9 n
ARV 技术可以看成是观测型AUV 向作业型AUV发展一个必然阶段,由于当前人工智能等技术的发展还远远不能使水下机器人具有较高的智能,研究这类混合式水下机器人,可以使人类利用机器人探索海洋的活动得以延伸。 7 ~5 @3 Y- t$ Q
$ t/ W" ]( T. l0 |6 R
2.自主/遥控水下机器人研究现状
! f- B5 [$ S+ [6 f 作为新一代混合作业模式的水下机器人,ARV凭借其独特的作业特点,近年来得到一定的发展,其潜在的应用前景更加广泛。尽管国际上对ARV还存在不同的定义,但与我们提出的ARV技术的内涵是一致的。
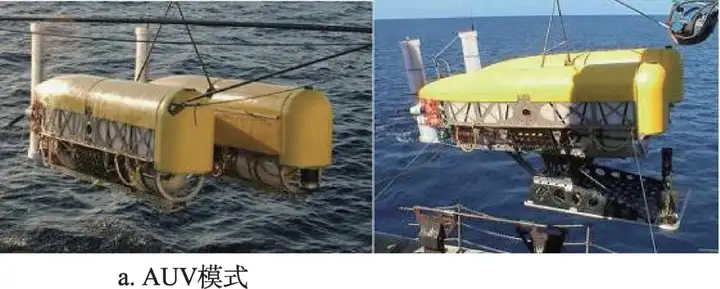
4 m& S' `' e; f; Q9 A2 N 国外最具代表性的混合式水下机器人是美国伍兹霍尔海洋研究所(WHOI)研制的混合式ROV—Nereus HROV(“海神”号),其最大工作水深为11000 米,主要用于地球、生命等科学探索。该水下机器人具有AUV、ROV两种作业模式,需要在机器人下水前现场改装。当采用AUV模式进行海底调查时,机器人不搭载机械手。当采用ROV模式时,可在现场加载机械手和取样单元,此时机器人通过光纤微缆与母船通信,完成取样作业。在“海神”号多次下潜中,主要以ROV作业为主。
m- C2 W; {5 ]# n9 C# Z: R$ c 3 k- S( ]5 |/ I+ C5 t/ B
图5 WHOI研制的Nereus
5 v. F! U3 E0 ], d9 t _ 伍兹霍尔海洋研究所研制的另一款混合型水下机器人是“Nereid-UI”HROV,它是在“海神”号的基础上研制的,主要用于极地科考和探测。该水下机器人最大工作水深为2000 米,携带20 千米的光纤微缆,并搭载多种生物、化学传感器,可进行大范围的冰下观测和取样作业。该机器人于2013 年完成了海上试验。
, _& C+ y: j3 h4 x$ f
2 @5 r( ?8 D& p% V 图6 WHOI研制的Nereid UI
. w& u; f4 l! b. l 法国海洋开发研究院(IFREMER)研制的“阿丽亚娜”号(Ariane HROV)也是一款混合式水下机器人,主要用于沿海冷水珊瑚礁、海底峡谷、海山、悬崖等特殊地形的勘察和生物多样性观测。“阿丽亚娜”号重1800 千克,最大下潜深度2500 米,搭载有高清摄像机、照相机、水声通信机和两个机械手。“阿丽亚娜”号具有缆控(遥控)和自主两种操作模式,可通过普通船舶布放和回收。当其以遥控(ROV)模式运行时,通过光纤与母船连接,实现数据实时传输,当其以自主(AUV)模式运行时,通过水声通信将采集到的数据传至水面。2015 年“阿丽亚娜”号进行了深海试验,最大下潜深度2011 米。
. G. c8 G8 Z7 T" a( T3 [1 H
9 {" x% ^5 R8 X! ]* x9 [9 h2 X 图7 法国IFREMER研制的HROV Ariane - x" A/ N9 z4 r" {7 J, N$ P* |
目前,国内在自主/遥控水下机器人研制方面,中科院沈阳自动化所(SIA)、中国船舶科学研究中心、上海交通大学等单位相继开展了相关研究,并取得了一定的进展,一些ARV系统开展了海上试验及应用。
- l4 [, q; t {8 [8 p8 l 中科院沈阳自动化所于2003 年在国内率先提出了自主/遥控水下机器人(ARV)的概念,2005 年至今,先后研制成功多型ARV并完成了湖试、海试及应用工作。以下针对极地、深渊两种应用场景进行介绍。 + |) g$ i: ~. @+ l: x
1 ]9 Q" `( ]% w3 v- A
3.自主/遥控水下机器人应用 + j- H5 U0 p5 P% T5 c5 }9 L- R! T
自主/遥控水下机器人凭借其独特的作业特点和技术优势,近年来得到了一定的发展,典型的应用领域包括复杂海区的勘探与调查作业、极地冰下调查、深渊调查及作业等。 4 B) z5 i* g! y! T9 E
在过去的十年中,我们研制的ARV 多次在深渊、极地开展试验应用,在人类难以到达的区域,进行调查及作业,帮助科学家探索海洋深处地球生命的起源、北极海冰变化及其影响等重大科学问题。
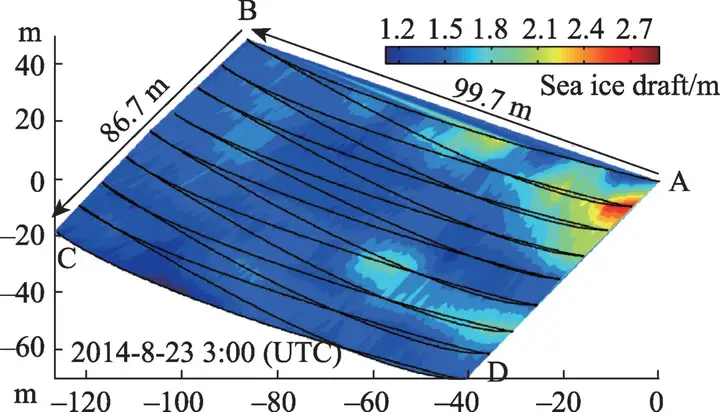
" B: A% @, l1 y7 Q9 H; \ 北极ARV是国家863 计划支持的,针对北极海冰连续观测需求而研制的混合式水下机器人,该机器人于2008 年研制成功。2008 年~2014 年间,北极ARV先后三次参加中国北极科考应用。在科考中,北极ARV多次从冰洞下潜,沿预定轨迹自主完成对指定海冰区的连续观测,通过其搭载的光通量测量仪、CTD、水下摄像机等设备,对海冰厚度、海冰底部形态、海冰及融池下光透射辐照度等进行了观测,获得了北极浮冰的多项观测数据。还拍摄到北极冰下的多种浮游生物,使科学家可以直接进行观测研究,这些都是传统科考设备所无法获取的。由于采用ARV进行观测,所获得的数据实时连续,且具有精确的位置信息。通过这些数据,科学家可定量计算出太阳辐射对北极海冰融化的影响,同时从动力学和热力学两方面分析出海水对北极海冰的影响。图8 为第四次北极科考期间,北极ARV从北纬87 度冰洞布放入水开始冰下作业。图9 为北极ARV获得的北极海冰空间分布图。 6 ^% ~7 ~& [8 U( T( ~; Y
. \) c& u/ ?9 d2 N 图8 北极ARV入水作业(2010 年)
; d$ e) f7 S0 q: U) M1 D. Q . n/ t) x' ~: x# _0 I; ~
图9 海冰空间分布 6 S2 i; o$ m2 I, z" ]. i) |1 y$ c
北极ARV在北极科考中的多次成功应用,刷新了我国水下机器人在高纬度下开展冰下调查的记录,也提升了我国水下机器人技术水平和国际影响力。 ) \, S6 X6 }5 y3 g$ r
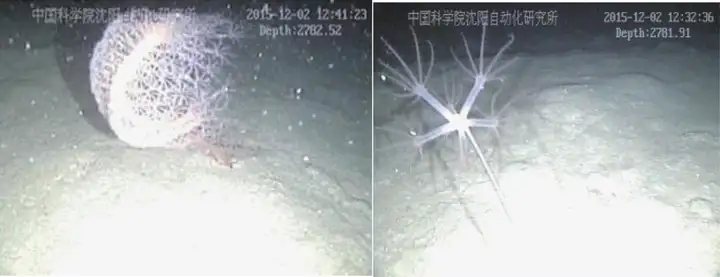
“海斗”号ARV是针对深渊科考需求研制的全海深(11000 米)ARV关键技术验证平台,在中科院先导专项的支持下,我们于2015 年完成了平台建造,同年开展浅海试验及3000 米级深海试验,试验中ARV最大下潜深度2784 米,在海底工作74 分钟,获得了全过程有效视频、海洋温盐剖面数据,同时也发现了有趣的海底生物。
3 n, z. _& y! m6 q3 K
) v5 b/ m/ L6 h6 s3 t" \. ~ 图10 “海斗”号ARV拍摄的海底生物
7 Q/ `5 l! [* S, Q& P5 a3 u5 _7 v 自2015 年起我们通过持续不断的测试及试验,对全海深ARV涉及的主要关键技术开展研究和试验验证。
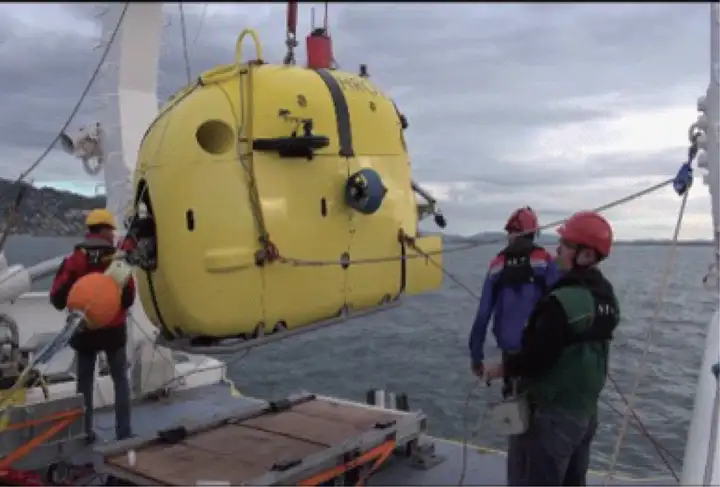
9 l6 F- @ q. x9 Q% @4 j 2016 年~2018 年的3 年中,“海斗”号ARV三次赴马里亚纳海沟挑战者深渊执行航次科考应用任务,共计完成11 次万米下潜,最大下潜深度10905米,刷新并创造了我国水下机器人最大下潜作业深度记录,获取了完整的深渊温盐深数据。在2018 年深渊航次中“海斗”号成功实现了万米海底着底,在深渊海底累计工作近6 小时,对挑战者深渊局部区域地形与深度进行了精确测量,在国内首次实现了全海深高清视频直播。通过多个航次的试验应用,对全海深ARV多项关键技术进行了验证。 ! n# X& y2 i3 R" m6 A# h! j
* f3 e+ y( A/ }, C* v
图11 “海斗”号ARV布放 & i7 p9 ~8 o5 @8 k# {
! g, P- c/ L) R6 x$ K" g" W ]
图12 “海斗”号拍摄的海底视频截图
' A5 Z: t3 R5 R+ T4 ^& A7 M* z1 K 在“海斗”号研制和应用的基础上,由科技部“十三五”国家重点研发计划支持,沈阳自动化所联合国内十余家优势单位研制了我国首台作业型全海深自主遥控水下机器人“海斗一号”。
9 T& x# l5 O! y+ ]" C% f
( K6 n4 I7 q7 m5 ?6 {$ @ 图13 “海斗一号”ARV
. ~& l+ @' J1 n8 b- q. i& h h7 p2 D3 ~ 2020 年5 月“海斗一号”在马里亚纳海沟完成首次万米海试与试验性应用,最大下潜深度10907米,创造了我国水下机器人最大下潜深度纪录。其携带的机械手完成了触发采水、沉积物取样、布放标志物等作业,实现了ARV全海深探测与作业。
, S8 _. ^8 g" g$ e9 k h 8 |' `; i/ h' j( Z3 C
4. 结论 2 F, k( B7 @! C* u# F) G. h
自主遥控水下机器人的研究已有十几年的历史,随着研究的不断深入,ARV在水下探测、极地冰下调查、深渊调查及作业等领域得到了一定的应用,实现了由观测型向作业型的发展历程。未来,随着人工智能等技术的发展,将使水下机器人具有较高的智能,实现其自主作业能力,并在更多的领域得到广泛的应用。 ; H$ v" A7 e' K. c6 j" P, \+ o
- c: t2 C v2 Y3 J 4 R9 B/ Z3 t( R: y3 I
* B) l/ y$ Y/ |3 Q" E' G# |' A
完 4 Y. Z. ]- B$ W" v
* Z1 E+ P1 t7 F3 b/ } 本文选自《现代物理知识》2021年第1期 YWA摘编 ! h. j2 _( {" D) u
《现代物理知识》
G* g2 `7 x8 M, l 搜索微信号 ! Q" @( ?1 V% w/ k" p
mpihep $ r9 k# O* d/ y
长按扫码关注我们
. U' D3 x0 \* U! v: G
) j- P! f4 h5 _- K9 D( o; D
2 H9 Y& x- I- V; C* T" ~
5 F- X0 Y& y3 N9 h D* H
7 [. j a, |2 H' ~/ ]/ V. R1 Q9 U |