|
( g4 G7 y# {/ P5 g# G+ q4 ^
иҝҷзҜҮеҺҹжқҘжҳҜзӯ”вҖңж№–зҡ„ж°ҙйҮҸжҳҜжҖҺд№ҲжөӢеҮәжқҘзҡ„вҖқ иҝҷдёӘй—®йўҳзҡ„пјҢжңҖиҝ‘еҲҡеҘҪеҒҡдәҶзӮ№е®һд№ пјҢжқҘжҖ»з»“дёӢе“Ҳ
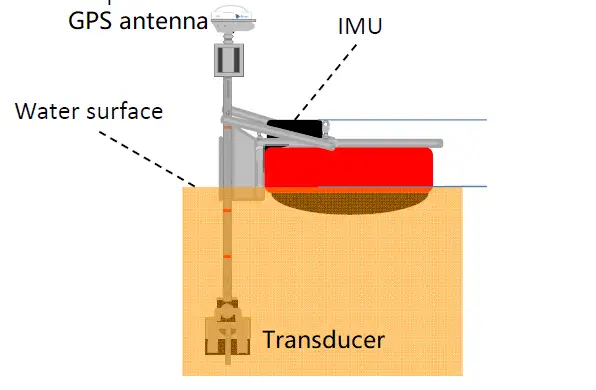
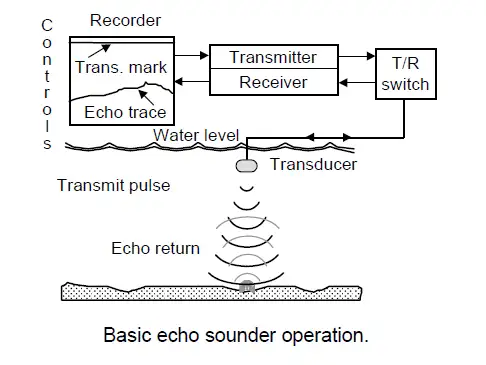
# y1 ^. Y5 f) o; Z еӣҫ1 жө·жҙӢжөӢз»ҳж•ҙдҪ“иҝҮзЁӢ йӮЈдёӢйқўе°ұз»“еҗҲеӣҫ1и®Іи®Іж°ҙж–ҮжөӢйҮҸпјҲHydrographic surveyпјүгҖҗеңЁжҲ‘еӣҪдё“з§°жө·жҙӢжөӢз»ҳиҫғеӨҡгҖ‘пјҢе…¶ж ёеҝғеҚіеҰӮдҪ•иҺ·еҫ—ж°ҙеә•зӮ№дёүз»ҙеқҗж Ү并д»ҘжӯӨе»әжЁЎгҖӮд»ҘдёӢд»Ӣз»ҚжҲ‘зҹҘйҒ“зҡ„еҮ з§Қж–№жі•пјҡ
5 ~) S% T2 ^. w% y- W# I# m; w2 ]! h0 a* F) |4 M" {/ p" `; Z6 Q ]
йҰ–е…ҲпјҢжҲ‘们йңҖиҰҒдёҖиүҳиҲ№пјҢиҝҷиүҳиҲ№йңҖиҰҒжҗӯиҪҪеҸҜд»ҘжөӢж°ҙе№іеқҗж Үе’ҢжөӢж°ҙж·ұзҡ„иЈ…еӨҮпјҢжңҖеҘҪиҝҳжңүдёӘжөӢе§ҝжҖҒзҡ„иЈ…еӨҮгҖӮпјҲеҰӮеӣҫ2пјүгҖҗзҺ°еңЁд№ҹжңүдёҚе°‘з”Ёж— дәәиҲ№зҡ„гҖ‘
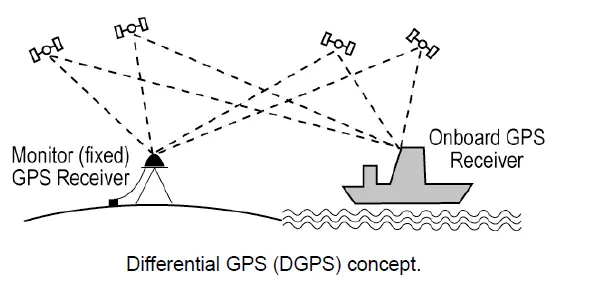
% B; w5 b. p3 S$ D( Y0 {' u! A еӣҫ2 иҲ№йңҖжҗӯиҪҪзҡ„иЈ…еӨҮ ж°ҙе№іеқҗж ҮXYеҜ№жҲ‘们жқҘиҜҙжҜ”иҫғз®ҖеҚ•пјҢе’Ңең°йқўдёҠдёҖж ·пјҢз”ЁGPSе°ұиЎҢпјҢзІҫеәҰиҰҒй«ҳзҡ„иҜқз”ЁDGPS(дјӘи·қжі•е·®еҲҶ)гҖҗеҰӮеӣҫ3гҖ‘жҲ–RTK(иҪҪжіўзӣёдҪҚжі•е·®еҲҶ)пјҢиҝҷж ·еҹәжң¬иғҪеҫ—еҲ°еҲҶзұізә§д»ҘдёҠзІҫеәҰдәҶгҖӮгҖҗеңЁGPSеҮәжқҘд№ӢеүҚдҪҝз”ЁLoran-CеҸҢжӣІе®ҡдҪҚиҫғеӨҡгҖ‘ ' n3 N; v+ H( [5 a6 t
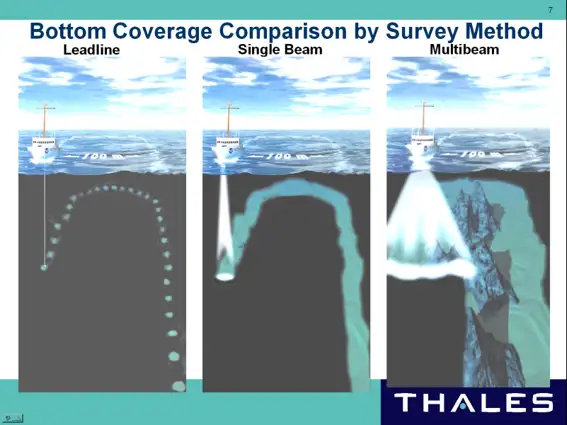
 йӮЈж°ҙж·ұжҖҺд№ҲжөӢе‘ўпјҢжҲ‘们дјҡжғіеҲ°з”ЁжөӢи·қзҡ„дј з»ҹеҠһжі•з”өзЈҒжіўпјҢеҸҜжғңз”өзЈҒжіўеңЁж°ҙдёӯиЎ°еҮҸеӨӘеҝ«дәҶпјҢдәҺжҳҜйҖүжӢ©йҮҮз”ЁеЈ°жіўдәҶпјҢдҫқ然жҳҜз”ЁйҖҹеәҰ*еҸ‘е°„жҺҘеҸ—时延/2иҝҷз§Қж–№жі•жқҘжөӢи·қгҖӮжңүдёӨз§Қеёёз”ЁиЈ…еӨҮеҸҜдҫӣдҪҝз”ЁпјҢеҚ•жіўжқҹе’ҢеӨҡжіўжқҹжөӢж·ұд»ӘпјҢеҰӮеӣҫ4жүҖзӨәгҖӮеҚ•жіўжқҹиҰҶзӣ–йқўз§Ҝе°ҸпјҢжҜ”иҫғдҫҝе®ңпјҢеӨҡжіўжқҹзәҝйҳөжҺЁжү«пјҢиҰҶзӣ–йқўз§ҜеӨ§пјҢиҰҶзӣ–еҢәиҫ№з•ҢдёҠзІҫеәҰдёҚеҰӮеҚ•жіўжқҹпјҢжҜ”иҫғиҙөгҖӮеҜ№дәҺжөӢж·ұеЈ°зәіпјҢе’ҢGPSдёҚеҗҢпјҢ时延дёҚеҶҚжҳҜиҜҜе·®зҡ„йҮҚзӮ№[жҜ•з«ҹе…үйҖҹиҝҳжҳҜжҜ”еЈ°йҖҹй«ҳдәҶеҘҪеӨҡж•°йҮҸзә§]пјҢиҖҢйңҖиҰҒжӣҙеӨҡең°е…іжіЁеЈ°йҖҹгҖӮеЈ°йҖҹеңЁж°ҙдёӯйҡҸзқҖжё©еәҰпјҢзӣҗеәҰпјҢеҺӢејәзҡ„еҸҳеҢ–иҖҢеҸҳеҢ–пјҢжңүдёҖдәӣйҡҸж·ұеәҰеҸҳеҢ–зҡ„з»ҸйӘҢе…¬ејҸдҪҶд№ҹдёҚеҮҶпјҢжүҖд»ҘдёҖиҲ¬дјҡеңЁе®һең°ж Үе®ҡдёҖдёӘе№іеқҮеЈ°йҖҹгҖӮ(ж°ҙеЈ°еӯҰиҝҷеқ—е„ҝжҲ‘д№ҹдёҚжҮӮпјҢиІҢдјје“Ҳе·ҘеӨ§еҫҲеҺүе®і)гҖӮ[жӯӨеӨ–пјҢд№ҹеҸҜд»Ҙз”ЁжңәиҪҪжҝҖе…үд№Ӣзұ»зҡ„йҖҡиҝҮж°ҙйқўеҸҚе°„дёҺж°ҙеә•еҸҚ射时延жқҘжөӢж·ұпјҢдёҚиҝҮзІҫеәҰиҫғдҪҺдё”еҸӘиғҪйҖӮз”ЁдәҺеҮ еҚҒзұід»ҘеҶ…зҡ„жө…ж°ҙеҢә,жң¬ж–ҮдёҚдҪңи®Ёи®ә] , N$ |1 F/ R" w
еӣҫ4 дёҚеҗҢжөӢж·ұж–№жі•жҜ”иҫғcopyrightпјҡhttp://www.fugro-pelagos.com/papers/newdevinmulitbeambackscatter/images/Bottom%20Coverage%20Comparison.jpg
8 V2 a9 r3 D( R) Y" O дёҚиҝҮз”ұеӣһеЈ°жөӢж·ұд»ӘechosounderжөӢеҫ—зҡ„并дёҚжҳҜжҲ‘们жүҖжғіиҰҒзҡ„ж°ҙж·ұгҖӮеҰӮеӣҫдёҖжүҖзӨәпјҢжҲ‘们иҝҳйңҖеҒҡжҪ®жұҗж”№жӯЈtide correctionпјҢеЈ°жіўеҸ‘е°„жҺҘеҸ—еҷЁе®үж”ҫдҪҚзҪ®ж”№жӯЈdraftпјҢеЈ°йҖҹж”№жӯЈsound velocity correctionиҝҳжңүиҲ№зҡ„дҫ§еҖҫдҝҜд»°дёҠдёӢжө®еҠЁж”№жӯЈroll,pitch,heave correction. ! @+ q/ ^$ w8 e
дёӢйқўдё»иҰҒд»Ӣз»ҚжҪ®жұҗж”№жӯЈгҖӮжҪ®жұҗ(зү№жҢҮеһӮзӣҙж–№еҗ‘)дё»иҰҒз”ұжңҲзҗғеҸҠеӨӘйҳіеј•еҠӣеј•иө·пјҢе…·дҪ“еҺҹзҗҶпјҢжҖ§иҙЁеңЁжӯӨдёҚдҪңд»Ӣз»ҚгҖӮз”ұдәҺжҜҸж—¶жҜҸеҲ»жҪ®жұҗйғҪеңЁеҸҳеҢ–пјҢжҲ‘们иҰҒеҫ—еҲ°еӣәе®ҡзҡ„з»қеҜ№ж°ҙж·ұпјҢйңҖиҰҒдёҖдёӘеҹәеҮҶгҖӮ 7 P/ R8 e) l* e) F, v
дёҖиҲ¬жҲ‘们еҸ–еӨ©ж–ҮжҪ®жұҗжңҖдҪҺжҪ®дҪңдёәиҝҷдёӘеҹәеҮҶChart DatumпјҢиҝҷдёӘеңЁеҗ„ең°ж–№д№ҹдјҡдёҚдёҖж ·пјҢйңҖиҰҒең°ж–№йӘҢжҪ®з«ҷз»Ҹе№ҙзҙҜжңҲзҡ„и§ӮжөӢгҖӮдёҖиҲ¬пјҢе®ғдёҺеӨҡе№ҙе№іеқҮжө·ж°ҙйқўй«ҳеәҰй—ҙзҡ„е·®ејӮдјҡжҳҜдёҖдёӘеёёж•°пјҢиҖҢеӨҡе№ҙе№іеқҮжө·ж°ҙйқўеҚіиҜҘеӨ„зҡ„еӨ§ең°ж°ҙеҮҶйқўgeoidпјҢжҳҜеӨ§ең°жөӢйҮҸеӨ–дёҡзҡ„еҹәеҮҶйқўгҖӮгҖҗеҸҰеӨ–пјҢеҰӮжһңиҰҒжөӢйҮҸж°ҙе№іж–№еҗ‘зҡ„жө·жөҒж–№еҗ‘еҸҠйҖҹеәҰпјҢжҲ‘们еҸҜд»Ҙз”ЁADCP(еЈ°еӯҰеӨҡжҷ®еӢ’жөҒйҖҹеү–йқўд»Ә)жқҘжөӢйҮҸгҖ‘ жҪ®жұҗж”№жӯЈе°ұжҳҜеҪ“еүҚж°ҙйқўеҲ°иҝҷдёӘChart DatumеҹәеҮҶзҡ„еһӮи·қгҖӮе®һйҷ…жөӢйҮҸдёӯжңүдёӨз§Қж–№жі•и®Ўз®—жҪ®жұҗж”№жӯЈгҖӮ
2 O& o5 \, b- [4 {1 H' D 第дёҖз§ҚеҰӮеӣҫ1е·Ұдҫ§жүҖзӨәпјҢеңЁеІёиҫ№ж°ҙйҮҢз«ӢдёҖж°ҙеҮҶе°ә(жҜ”еҰӮиҜҙ5зұі)пјҢ然еҗҺйҖҡиҝҮж°ҙеҮҶд»Әй«ҳзЁӢдј йҖ’еҲ°дёҙиҝ‘зҡ„ж°ҙеҮҶзӮ№Benchmark(д№ҹеҸҜд»ҘжҳҜеӨҡдёӘпјҢ然еҗҺдҪңе№іе·®)пјҢиҝҷж ·еІёиҫ№жөӢжҪ®ж°ҙеҮҶе°әtide staffйЎ¶з«Ҝзҡ„й«ҳзЁӢ(зӣёеҜ№дәҺgeoid)еҸҜзҹҘгҖӮеҸҲеҸҜеңЁжөӢжҪ®ж°ҙеҮҶе°әtide staffдёҠиҜ»еҮәеҪ“еүҚж°ҙйқўй«ҳеәҰobserved levelпјҢйӮЈд№ҲжҲ‘们еҸҜд»Ҙз”ұдёӢејҸи®Ўз®—жҪ®жұҗж”№жӯЈпјҡ 5 |; |, F, t* }$ X
# ^0 }, V% g9 w3 ~8 j Tide correction= Staff top level+known constant-(staff height-observed level)
3 `. n% v; U6 v4 ^ жҪ®жұҗж”№жӯЈ=жөӢжҪ®ж°ҙеҮҶе°әйЎ¶з«Ҝй«ҳзЁӢ+еӨ§ең°ж°ҙеҮҶйқўдёҺжө·еӣҫеҹәеҮҶеёёж•°е·®-пјҲжөӢжҪ®ж°ҙеҮҶе°әй«ҳ-еҪ“еүҚж°ҙдҪҚиҜ»ж•°пјү % ~2 ~+ ?5 V7 Z3 U4 f2 q4 B
known constant еҚідёәжүҖз”ЁChart Datum дёҺеӨ§ең°ж°ҙеҮҶйқўд№Ӣй—ҙзҡ„е·ІзҹҘеёёж•°гҖӮ
3 A3 n/ O; c$ a9 s- {2 w
/ W# _7 K4 P- f4 N7 [ 第дәҢз§Қж–№жі•жҳҜзӣҙжҺҘз”ЁGPS RTK жөӢеҫ—зӣёеҜ№дәҺWGS84жӨӯзҗғйқўзҡ„й«ҳпјҢеҶҚйҖҡиҝҮеӨ§ең°ж°ҙеҮҶйқўзІҫеҢ–
- Z& E7 G! h0 j) S4 H) A* j жЁЎеһӢеҫ—еӨ§ең°ж°ҙеҮҶйқўе·®и·қgeoid gap然еҗҺжңүеҰӮдёӢиЎЁиҫҫејҸпјҡ . F, d8 j* k7 e: }6 P! u+ N8 \& J
4 V) s: @7 e) I3 N5 X' P Tide correction= GPS height-geoid gap+known constant-antenna height
( ^& x( O. |$ F3 Z9 R9 {5 r( N, z жҪ®жұҗж”№жӯЈ=GPSй«ҳ-иҜҘеӨ„еӨ§ең°ж°ҙеҮҶйқўе·®и·қ+еӨ§ең°ж°ҙеҮҶйқўдёҺжө·еӣҫеҹәеҮҶеёёж•°е·®-GPSеӨ©зәҝеҲ°ж°ҙйқўй«ҳ : ?7 @ z0 E' P b, i6 q* W
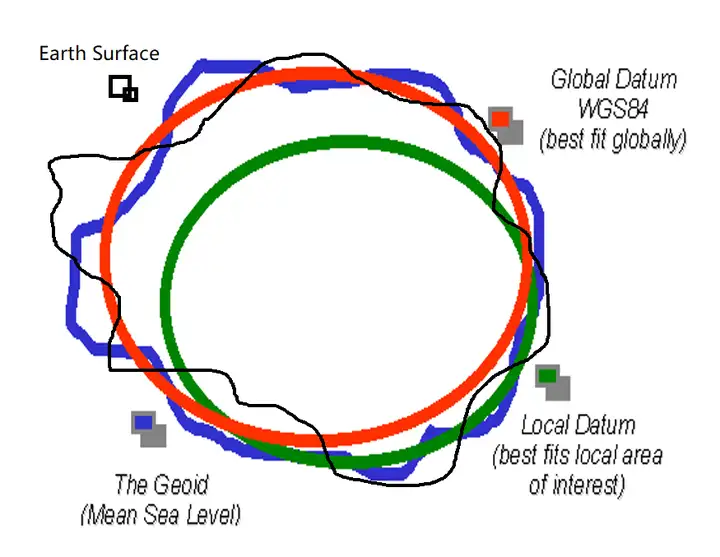
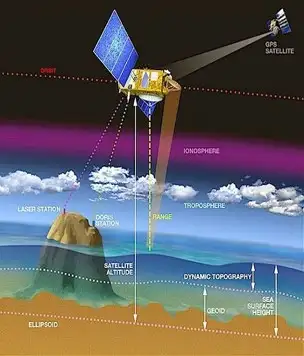
第дәҢз§Қж–№жі•жҜ”иҫғж–№дҫҝпјҢдҪҶеӨ§ең°ж°ҙеҮҶйқўзІҫеҢ–жҜ•з«ҹиҝҳдёҚжҲҗзҶҹпјҢRTK Zж–№еҗ‘иҜҜе·®д№ҹиҰҒеҺҳзұізә§дәҶпјҢзІҫеәҰдјҡдҪҺзӮ№пјҢиҝҷе°ұе’Ңең°йқўдёҠдј з»ҹж°ҙеҮҶжөӢйҮҸиҝҳжІЎиў«GPSй«ҳзЁӢжөӢйҮҸеҸ–д»ЈжҳҜдёҖдёӘйҒ“зҗҶгҖӮпјҲеҰӮеӣҫ5пјү
0 [/ T( q' g# ]3 z9 b# Y еӣҫ5 иҮӘ然表йқўпјҢеӨ§ең°ж°ҙеҮҶйқўпјҢеҸӮиҖғжӨӯзҗғйқўпјҢжҖ»жӨӯзҗғйқўжҜ”иҫғ еҸӮз…§еӣҫ1дёӯй—ҙпјҢеҫ—еҲ°жҪ®жұҗж”№жӯЈеҗҺпјҢжҲ‘们еҶҚз”ұжөӢе§ҝжҖҒзҡ„IMUеҫ—еҲ°roll,pitch,heave ж”№жӯЈпјҢз”ұж°ҙеЈ°еӯҰжЁЎеһӢеҫ—еҲ°еЈ°йҖҹж”№жӯЈпјҢжҳ“жөӢеҫ—draft(ж°ҙйқўеҲ°transducerеә•)然еҗҺжҲ‘们жүҖиҰҒжұӮзҡ„ж°ҙж·ұchart depthе°ұеҸҜд»ҘжҢүеҰӮдёӢиЎЁиҫҫејҸеҫ—еҲ°дәҶпјҡ
. y+ p7 c _ I( y6 B: F* D( |" _, R2 ]. S) w
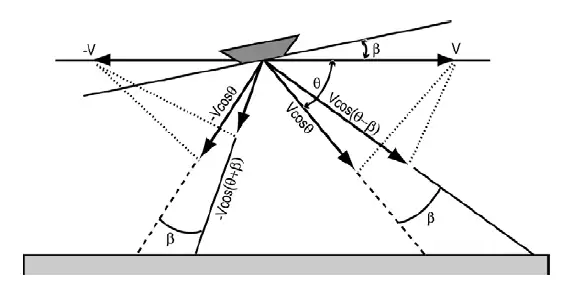
chart depth=observed depth+draft+roll pitch heave correction+sound velocity correction-tide correction 0 Z& x8 y- g: ~5 W9 P
жө·еӣҫж·ұеәҰ=и§ӮжөӢж·ұеәҰ+еЈ°жіўеҸ‘е°„жҺҘеҸ—еҷЁе®үж”ҫдҪҚзҪ®ж”№жӯЈ+иҲ№зҡ„дҫ§еҖҫдҝҜд»°дёҠдёӢжө®еҠЁж”№жӯЈ+еЈ°йҖҹж”№жӯЈ-жҪ®жұҗж”№жӯЈ
! P8 a6 s/ x" R" W. [; f# b" |) j) A1 S7 G0 p( s
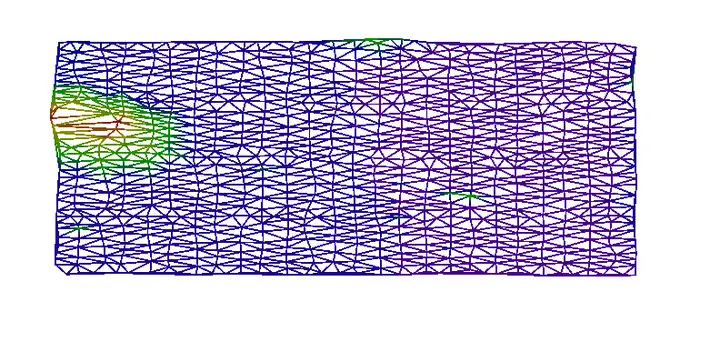
еӣҫ6 еҖҫдҫ§еҜ№жөӢж·ұзҡ„еҪұе“Қ иҝҷж ·жҲ‘们е°ұеҫ—еҲ°дәҶжө·еӣҫж·ұеәҰZ еқҗж ҮпјҢз”ұдәҺGPSе’Ңtransducerзҡ„е®үиЈ…ж°ҙе№ідҪҚзҪ®дёҖиҲ¬дёҚдёҖж ·пјҢжҲ‘们иҝҳиҰҒдҪңдёҖдёӘ平移пјҢиҝҳжңүиҲ№е§ҝжҖҒзҡ„ж—ӢиҪ¬еҸҳжҚўжүҚиғҪеҫ—еҲ°transducerдҪҚзҪ®зҡ„зІҫзЎ®XYеқҗж ҮгҖӮ иҮіжӯӨпјҢжҲ‘们жөӢж°ҙеә•зӮ№дёүз»ҙеқҗж Үзҡ„д»»еҠЎе°ұе®ҢжҲҗе•ҰгҖӮз”ұдәҺеҚ•жіўжқҹеЈ°е‘җеңЁиҲӘзәҝдёҠд№ҹжҳҜд»ҘжҹҗдёҖйў‘зҺҮжөӢзҰ»ж•ЈзӮ№зҡ„пјҢжҢүZеӯ—жҠҳиҝ”жөӢеҫ—еҲ°зҡ„д№ҹжҳҜжөӢеҢәзҡ„зҰ»ж•ЈзӮ№еқҗж ҮпјҢж•…йңҖжҸ’еҖје»әз«ӢDEMпјҢиҝҷе’Ңең°йқўжөӢйҮҸд№ҹжҰӮеҝөе·®дёҚеӨҡгҖӮ
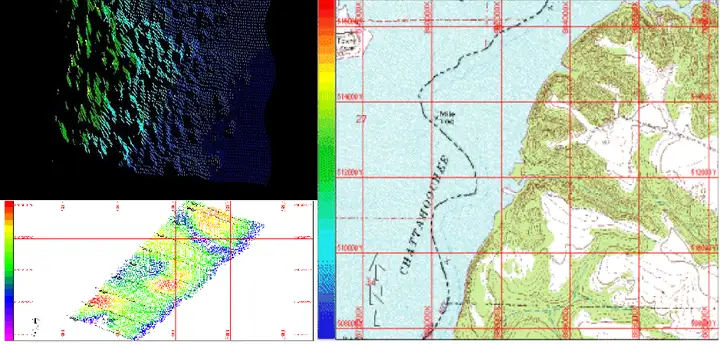
* U( l$ [$ G0 k- W еӣҫ7 еЈ°зәіе·ҘдҪңзӨәж„Ҹ ж•°еӯ—ең°еҪўе»әжЁЎе®ҢжҲҗеҗҺз”ЁдёҖдәӣGISз®—жі•е°ұеҸҜд»ҘиҝӣиЎҢеҗ„з§ҚжҹҘиҜўдёҺеҲҶжһҗпјҢжңүжұӮеҢәеҹҹж°ҙйҮҸпјҢиҲӘиЎҢжө·еӣҫпјҢжө·жҙӢзӣ‘жөӢпјҢиҫ…еҠ©жө·еә•е·ҘзЁӢзӯүеӨҡз§Қеә”з”ЁгҖӮи§Ғеӣҫ8 6 @! O# Z3 ~* y- `; [3 U2 B
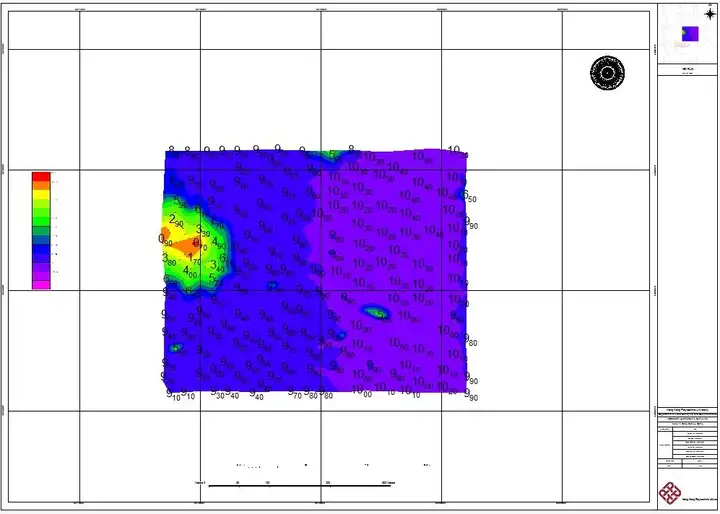
еӣҫ8 жө·жҙӢжөӢз»ҳжҲҗжһң[з”ұдәҺиҝҷй—ЁиҜҫжҳҜз”ЁиӢұиҜӯеӯҰзҡ„пјҢйӮЈдәӣжңҜиҜӯзңҹдёҚзҹҘжҖҺд№Ҳзҝ»иҜ‘пјҢи§Ғи°…] 6 _6 Y0 z, v. d" W
еҸҰпјҢд№ӢеүҚзңӢеҲ°жңүзӯ”жЎҲиҜҙеҸҜд»Ҙз”ЁеҚ«жҳҹжөӢж°ҙж·ұпјҢжөӢжө·еә•ең°еҪўпјҢиЎЁзӨәдёҚеӨӘи®ӨеҸҜпјҢеҰӮдёӢеӣҫ
! ?" }/ O$ W% J. C; f2 m- o/ i, o& m
# ~ Z* ^* l9 c" c" E1 ]9 T8 X йҖҡиҝҮиҝҷз§Қж–№жі•пјҢжҲ‘们еҸӘиғҪеҫ—еҲ°еҚ«жҳҹеҲ°ж°ҙйқўи·қзҰ»пјҢеҚ«жҳҹеҲ°WGS84жӨӯзҗғйқўзҡ„и·қзҰ»пјҢ然иҖҢжӨӯзҗғйқўеҲ°зңҹе®һжө·еә•ең°иЎЁиҝҳе·®дәҶеӨӘеӨҡеӨӘеӨҡгҖӮж•…иҝҷз§Қж–№жі•еҸӘиғҪз”ЁжқҘзӣ‘жҺ§ж°ҙйқўзӣёеҜ№жӨӯзҗғйқўзҡ„еҸҳеҢ–пјҢеҰӮзӣ‘жҺ§жө·е№ійқўдёҠеҚҮд№Ӣзұ»зҡ„й—®йўҳпјҢжөӢжө·еә•ең°еҪўжҳҜдёҚиЎҢе“’гҖӮиҝҳжңүз”ЁйҒҘж„ҹжқҘеҒҡзҡ„иҜқпјҢжңҖеҘҪзҡ„жіўж®өд№ҹе°ұиғҪз©ҝдёӘ60зұіеҗ§пјҢеӨ§жө·еҸҜдёҚжӯў60зұіж·ұпјҢеңЁжө·еІёиҫ№иҝҳиғҪзңӢеҮәдёӘйўңиүІеҸҳеҢ–жқҘеҲҶжһҗдёӢж°ҙж·ұпјҢеңЁж·ұжө·еҢәе°ұйғҪдёҖж ·гҖӮдёҚиҝҮ,еҚ«жҳҹжөӢй«ҳеҸҜд»Ҙй—ҙжҺҘжұӮеҸ–жө·жҙӢйҮҚеҠӣејӮеёёпјҢеҸҜеҸҚжј”еҮәжө·еә•ең°еҪўгҖӮиҷҪ然жөӢйҮҸж•ҲзҺҮжҸҗеҚҮжҳҫи‘—дҪҶзІҫеәҰиҫғдҪҺпјҢеңЁеҮ еҚҒзұізҡ„ж•°йҮҸзә§пјҢеңЁеҫҲеӨҡеә”з”ЁдёҠжҳҜдёҚж»Ўи¶іиҰҒжұӮзҡ„гҖӮ
% {# e4 @ I1 o% H& L8 o Reference: 9 z2 F9 b6 _4 b& f$ V3 }& S9 U
[1]C.D. de Jong, G. Lachapelle,S. Skone,I.A. Elema(2010), Hydrography,DelftUniversity PressThe Netherlands, pp.366 : X: K2 @% N+ O/ \" P
[2]DEPARTMENT OF THE ARMY U.S. Army,Corps of Engineers (2002), HYDROGRAPHIC SURVEYING, published by American Society of Civil Engineering Press.
8 q# |4 U* t& A, z* o& J [3]PolyU George,Liu PPT
7 X4 A' Y8 W& s0 s$ `' d: n- Z0 X PoеҮ еј жңҖиҝ‘жө·жөӢе®һд№ зҡ„еӣҫпјҢеҚ—жө·
* q7 n) L! P9 b% L4 ?
8 q! Q: D" J. M& ^
5 C5 h" X" ?% C0 v7 K/ D ( s; ~! B, f4 b2 v
" L2 S% ~9 e6 z( l: `
% l# j. J- R; c! h
(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)(в—ҸвҖ”в—Ҹ)
) W7 E3 G" z: E- N0 m+ P- J жңҖеҗҺжҠ’еҸ‘зӮ№ж— з”Ёзҡ„жғ…з»Ә - X2 `; s2 P8 ]( k
дәӨжҚўзҡ„еӯҰж Ўзҡ„жөӢз»ҳдёҺең°дҝЎзі»зҡ„sloganжҳҜGeomatics expresses our world. дёӘдәәж„ҹи§үиҝҳжҳҜжҢәиҙҙеҲҮзҡ„пјҢжөӢз»ҳдёҚжҳҜдёҖй—Ёж— з”Ёзҡ„еӯҰ科пјҢе®ғд№ҹи®ёдёҚиғҪеҲҮе®һзҡ„ж”№еҸҳжҲ‘们зҡ„дё–з•ҢпјҢжһҒеӨ§ең°ж”№е–„жҲ‘们зҡ„з”ҹжҙ»пјҢд№ҹи®ёжІЎжңүиү°ж·ұзҡ„зҗҶи®әпјҢжІЎжңүзӢ¬ж ‘дёҖеёңзҡ„дҪ“зі»пјҢдҪҶз»Ҹз”ұжөӢз»ҳпјҢиҝҷдёӘдё–з•Ңзҡ„зЎ®иў«жӣҙеҘҪең°пјҢжӣҙзІҫзЎ®ең°еұ•зҺ°еңЁжҲ‘们йқўеүҚгҖӮе®ғе°ұеғҸLOLйҮҢзҡ„иҫ…еҠ©дҪҚпјҢжҸ’жҸ’зңјпјҢжҺ’жҺ’и§ҶйҮҺпјҢеё®ADCпјҲе»әзӯ‘еңҹжңЁе·ҘзЁӢпјүжҺўи·Ҝж–ӯеҗҺпјҢеңЁAPпјҲCSпјҢEEпјүзҡ„carryдёӢйҖҒдёҠиҮӘе·ұеҫ®е°Ҹзҡ„иҙЎзҢ®пјҢиҷҪ然没е•Ҙиҫ“еҮәпјҢзјәе®ғд№ҹжҳҜдёҚиЎҢзҡ„гҖӮжҲ‘жғіиҝҷеӨ§жҰӮе·Із»ҸжҳҜжҲ‘иҝҷж ·зҡ„ж°‘е·ҘжңҖеӨ§зҡ„ж¬Јж…°е•ҰгҖӮ
; X/ F( u- i! h9 F+ q9 E- C- b( Y7 Q
! [" F5 {0 r4 u; v1 G8 Z5 s k ]! U
" l! m* t+ W5 j- _% O" l$ w$ e6 o/ j! e* z9 k! S- p
|