3 z- Z, B- p0 [, C7 p
近日,哈尔滨工程大学研发了国内首套海洋结构物水下无损检测机器人,并通过了国家科技部组织的验收,实现了国内水下无损检测的工程化示范应用。记者从哈尔滨工程大学获悉,该水下检测机器人可在水下500米完成各类海洋结构物的无损检测,填补了国内在该领域的空白。
9 j* j5 n+ z( L' C5 w# x$ u- K a

9 H6 j# v+ y: ` J. o0 w% h
国内首套海洋结构物水下无损检测机器人。哈尔滨工程大学供图
1 a$ S" A4 ?( {& H# B
机器人可在水深500米内的海洋结构物上稳定精准操作
* d4 |% v7 c& G8 A 海洋钻井船、海洋钻井、采油平台、海上风电塔桩等海洋装备大都采用钢结构桁架式结构,钢管对接、相贯线焊缝质量直接关系到结构安全。而受到风浪水流冲击和长年累月海水侵蚀等因素作用,结构物会形成裂纹,为了避免构件断裂,影响海洋装备的运营安全,就需要进行周期性的焊缝检测,提前发现潜在安全隐患。
7 G u7 A! x4 X0 s0 m 据不完全统计,我国海上风电塔有4300个,但能完成60米以下的专业水下结构物检测人员却不到200人。作业水域较深时,人工下水检测过于危险且成本过高,许多因素取决于探伤人员的经验和技术。国外已经研制了一系列的水下检测机器人,然而国内在该领域仍处于起步阶段。
# |, }$ Q% v: `) d/ _: v" d5 u
面对这一痛点,哈尔滨工程大学船舶工程学院副教授王刚带领学生们在5年前开展水下检测机器人的研发任务。水下作业不同于陆地,不仅面临水深的影响,而且存在扰流复杂,如何保证检测过程中机器人和探头的稳定,是极具挑战性的难题。
2 w5 o4 h9 w0 R! T; j

! B5 m$ I, g! I! T1 `
机器人下水操控检测。哈尔滨工程大学供图
& v+ f% _& s- \% w" S8 s- [
王刚称,该校船舶学院一直致力于培养行业创新型新工科人才,注重学生的实践能力,很多大二的学生研发的相关技术已经运用于水下检测机器人。
; G- h, C# B- E$ m" s
“目前,市场上运用的检测工具需要两位检测人员分别在水上和水下密切配合,而我们的技术给机器人增加了辅助定位系统,降低了检测人员的操作复杂度,从而使其能够更专注于检测数据的判断,提高作业效率,整个操作过程岸上一人就可以完成。”来自研发团队的陈思文表示。
' u$ f# i6 | W ]+ \5 H 据介绍,水下焊缝辅助定位系统已经获得国家软件著作权,该技术也让研发团队的陈思文与其同学赢得了“挑战杯”黑龙江省大学生创业计划竞赛金奖。
5 o. b8 w9 U, L+ D- u
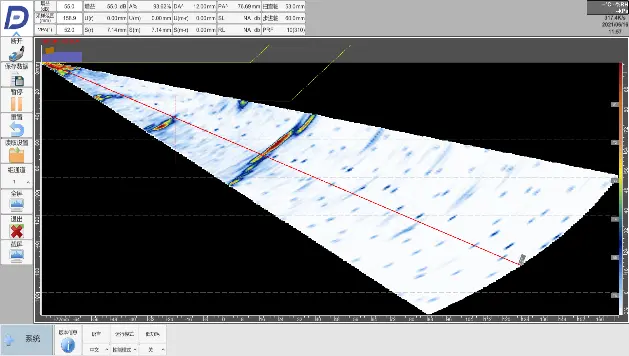
2 \" W% I8 ^. y1 U5 r 机器人检测信号图像。哈尔滨工程大学供图
) I1 B* z- R" z8 l
机器人可自主跟踪焊缝,简化检测人员操作
( K- t' ~1 A! v; X% k$ h3 x
据了解,团队通过多年攻关,还相继突破了水下扰流环境下可靠吸附、海洋结构物构型差异大、TKY型节点焊缝不易检测等难题。
6 u2 ^4 ]4 ^! M, ?7 |+ d; V 检测作业过程中水流扰动是无法回避的问题,在这种环境中如何保证机器人的稳定吸附与灵活运动是一大挑战。对此,研究团队设计了一套非接触式吸附系统,通过流速计感知检测机器人的流场情况,进而实时调整吸附力大小,找到检测过程中吸附牢靠与灵活运动之间的平衡点。
2 w& B6 A, M. u$ E 此外,海洋结构物管径最小是0.5米,而最大的可达8米左右,面对管径差距如此悬殊的海洋结构物钢桩,如何兼容各种形式的海洋结构物的管径也是一大难题。团队成员巧妙地将机器人的结构设计成可重构的三段铰接形状,通过改变铰接处的角度即可调整内切圆直径,满足了机器人兼容不同管径的检测任务。
4 ?' G' m3 @3 b
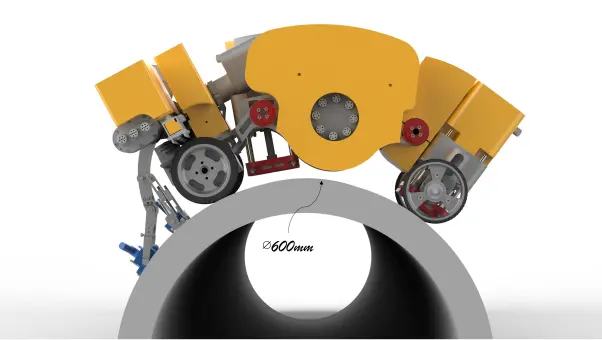
1 w/ P- G; J8 W! Z a: d) ~ 机器人进行小管径检测。哈尔滨工程大学供图
! J! J0 V& Q" V& v: m1 | 为了把岸上检测人员从复杂的空间相贯焊缝操作中解放出来,团队研究开发了人在环中的半自主检测技术,机器人可以自主跟踪焊缝,在检测到疑似缺陷时,操作人员可以专注操作探头角度,其他的运动操作则由机器人自动解算完成,极大降低了检测人员的操作难度。
r* I/ W; k# r" P# _ 去年,团队携带机器人先后在渤海锦州25-1油气田和中广核如东海上风电场进行了实际检测,机器人表现出色,完成了国内的首次风电塔桩水下机器人无损检测示范应用。海洋结构物水下机器人检测,不但避免了人工潜水检测的安全风险,还能提高检测效率,降低运维成本,有利于海洋各类资源的高效开发,为我国海洋能源安全提供了强有力的保障。
6 C$ n5 P( b& y" z( J
据悉,该团队还将继续改善水下检测机器人环境感知和智能决策能力,为水下机器人全自主作业技术贡献力量。
% ]4 d& Q) L# ?9 g) K& Z
新京报记者 张建林
9 Y5 W- B2 Q1 M7 F5 H 编辑 刘茜贤 校对 刘越
- X, O- H. h+ g+ h$ N 




