|
# ~$ r' L3 W; z7 \5 @0 w* k3 \
原标题:UB115无人船完成江西某水库灾后水下地形测量
& P0 ]5 H A- B3 w
: E# j8 l! `& k9 x1 B 水库概况:
0 S0 F, e/ t- D8 j7 X 藏于山谷之中,湖面露出点点山岛。山谷两侧青山翠绿,山水连天。春夏漫山鲜花怒放,百鸟鸣唱;秋季红枫似彩霞,泛舟湖面犹入画中。 & R% t9 K0 s, R k+ c
该水库不仅是当地重要的饮水水源地,巨大的蓄水量使它兼具防洪、灌溉、生态等功能。水库距县城6.5公里,水坝长146米,高32米,溢流面宽43米,湖面1.5平方公里。 0 d( j: r* k5 S/ `
2019年,江西某县遭遇了有水文记录以来最大洪灾,三年来水库库底淤泥及树木的大量沉积导致河道水位升高、有效库容减少。为清理淤积物,水库管理部门借助合众思壮UB115无人船进行了水下地形地貌测绘,为后续水库库底清淤工作提供了数据支撑,确保人民生产生活用水质量和安全。 3 A& R5 X5 I9 Q V, z
到达现场后,合众思壮工作人员首先与水库人员确定了测区,明确了测量的坐标系以及相关参数设置。成功完成下水试航、检查无人船各项指标无误后开始作业。由于测区位于水库库区,连日降雨,水电站机组泄洪发电,导致水位线变化很大,利用无人船“电子围栏”功能:航行过程中自动记录轨迹,生成测区边线,确保测量范围安全准确。 8 k( o- W) c z5 t

4 F: y8 A2 x6 t n
根据测绘要求,按照航线间距为10米、5米采集一组数据点规划好航线,给无人船发送航行指令,无人船按照预先设置好的航线开始采集作业。 ' P! g8 ]% V, d% ~# \4 |6 t1 I! S
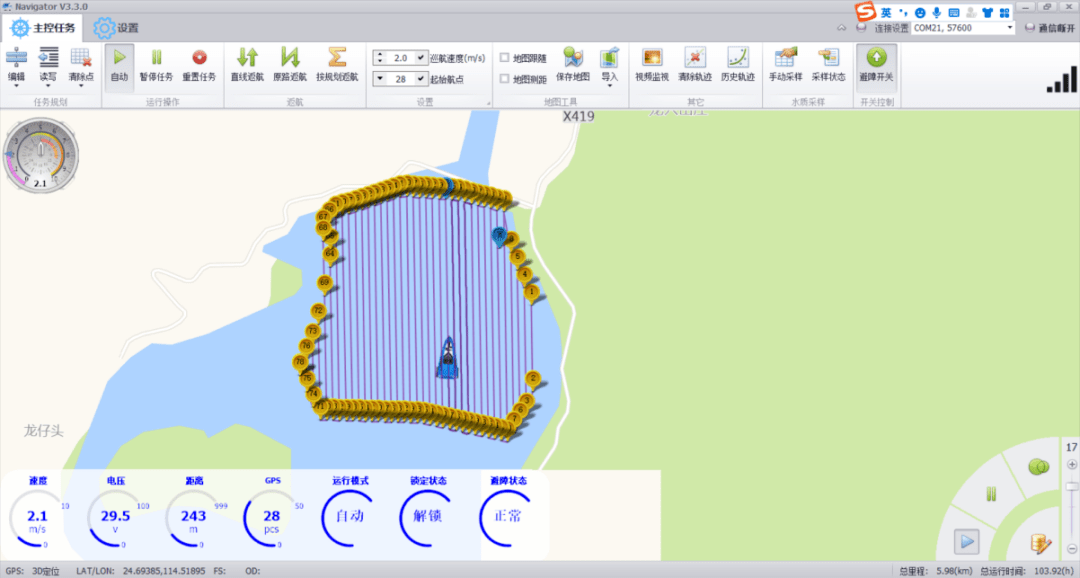 规划航线 规划航线
- I- f: s" Y% Y7 f 防弹材质 防水防撞
4 A. n: U- o5 O: B- H2 c 作业过程中,雨量较大,对于无人船的防水性是一个巨大的考验。UB115船体为凯夫拉+碳纤维复合材料,闭孔泡沫填充和全封闭隔舱防沉设计,防撞耐磨性强,防水性好。独立舱室设计,无惧雨水拍打与浪花飞溅,始终按照预设航线航行作业。
' [# Y6 Q6 r: }- p0 v 动力强 防缠绕 1 E0 q" B( }# p& v3 W
库区内不少漂浮的树木及当地居民的渔网,UB115无人船搭载的避障模块及时规避航行过程中的障碍物,采用的涵道式推进器采用吸水泵喷的推进方式,桨叶安装在涵道内部,推进器安装位置与船体齐平,轻松通过渔网放置的水域,避免了缠绕。 . u6 T8 b1 U( Q% q& N
机动灵活 “360调头” , T" N0 [* {+ ~5 Z- y
在一些狭窄,漂浮物较多的区域,采用人工操控的方式进行作业,利用UB115小巧灵活的特点,可原地“360调头”的特性,结合遥控器上高清的视频图传实时回传现场画面,应对各种复杂作业环境,保证了作业安全与作业进度。
8 m8 } u( B, F; H* c+ ^7 \" V4 K7 b 高效数据处理 现场打包发送
: k' C L4 ~* j 测量完成后,数据后处理简便快捷,现场即将原始数据处理完发送给客户,为后续清淤治理提供坚实的数据支撑,为百姓饮水安全贡献了一份力量。此次水下测量,UB115无人船表现高效稳定,受到客户多次称赞“科技让水下测量更简单”。
( q& R' z1 G5 Z: X/ c9 k Q 成果展示
4 ~- |& k# B: s* Z$ j" a/ S1 L8 {. i  数据采集软件页面 数据采集软件页面
- X1 ?2 q$ ]& c  数据成果 数据成果
/ d* d; m+ q5 y8 x0 H 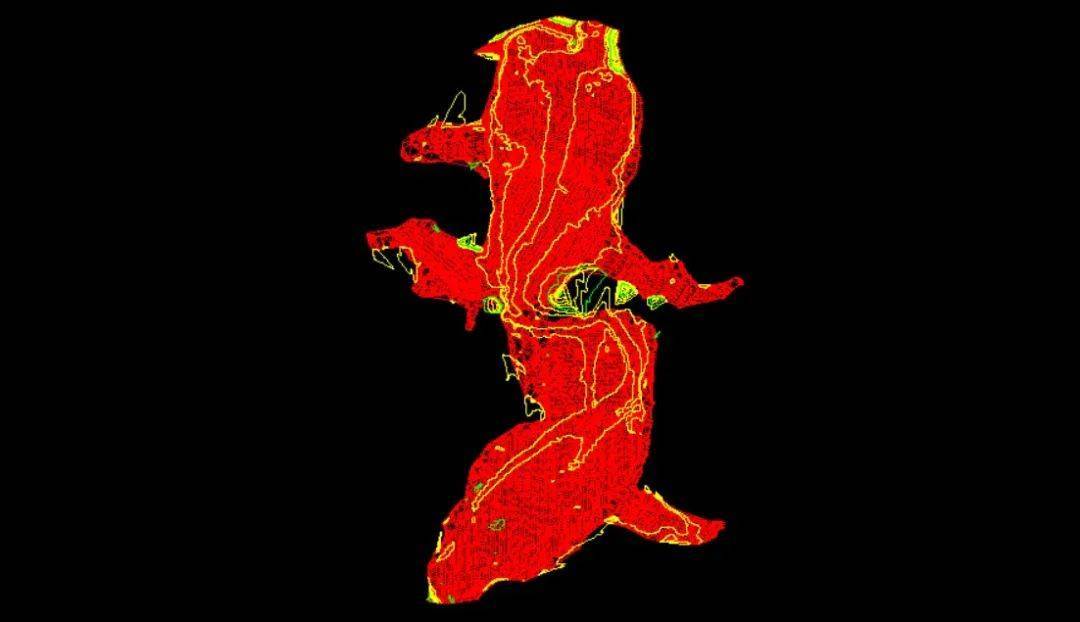 成果图(水下等高线) 成果图(水下等高线)
9 x& u; }7 @* o  水底高程及等高线返回搜狐,查看更多 水底高程及等高线返回搜狐,查看更多
; P' b2 F0 z! O {9 L
7 T5 {0 I, R0 S9 j5 J/ h 责任编辑: % w" ?& G: ?5 i1 z+ ]
% f5 j" V2 A, d1 B3 ?) n u
, T) L' N8 |0 L- ^' u/ A; I/ L- R! C0 \ b) X
# ^2 {7 _4 D- e- L! v* H, V | 







