+ A. K, q- I4 P, E$ B2 h0 D. O: k, J, E+ @% ]) b4 |* m
 $ g2 `% H0 ]: P
$ g2 `% H0 ]: P
E6 u! H& Z' K& ?& l* f зӮ№еҮ»иҝӣе…ҘпјҢжӢӣеӢҹing......
2 d) @0 C! X( m/ t1 s5 O# ~
 V2 X* C2 W( }: s; u" K
V2 X* C2 W( }: s; u" K
. W0 W8 u2 N2 c- |, Y  ( ^3 R' v1 M( L' y* E4 m4 A/ W
( ^3 R' v1 M( L' y* E4 m4 A/ W
$ a8 j- |- }2 C; b! {' a. {- q5 R- c дҪңиҖ…пјҡйҷҲз»ғгҖҒиӢҸејәгҖҒеҲҳй•ҝиҸҠгҖҒиө–йёЈпјҢдёӯеӣҪиҲ№иҲ¶йӣҶеӣўжңүйҷҗе…¬еҸёз¬¬дёғдёҖеӣӣз ”з©¶жүҖ
$ r: j: S+ ?( Z* v* a; N дё–з•ҢиҢғеӣҙеҶ…ејҖеұ•ж°ҙдёӢж— дәәиҲӘиЎҢеҷЁз ”еҸ‘зҡ„еӣҪ家主иҰҒдёәзҫҺгҖҒдҝ„гҖҒ欧дәҡеҗ„еӣҪзӯүпјҢе…¶дёӯд»ҘзҫҺеӣҪеңЁеҪ№ж•°йҮҸжңҖеӨҡпјҢеңЁиғҪжәҗеҠЁеҠӣгҖҒиҮӘдё»жҺ§еҲ¶гҖҒеҜјиҲӘзІҫеәҰеҸҠж°ҙеЈ°йҖҡдҝЎзӯүе…ій”®жҠҖжңҜеқҮеӨ„дәҺйўҶе…Ҳж°ҙе№іпјҢе·ІеҪўжҲҗзі»еҲ—еҢ–дә§е“ҒжҲ–иЈ…еӨҮпјҢе№ҝжіӣеә”з”ЁдәҺеҶӣж°‘еҗ„йўҶеҹҹгҖӮжҚ®е…°еҫ·е…¬еҸё2019е№ҙз»ҹи®Ўж•°жҚ®жҳҫзӨәпјҢе…Ёзҗғе·Із ”еҲ¶е®ҢжҲҗиҲӘиЎҢеҷЁи¶…иҝҮ160еһӢпјҢе…¶дёӯйҮҚйҮҸеңЁ2tд»ҘдёӢзҡ„ж•°йҮҸжҜ”дҫӢи¶…иҝҮ50%гҖӮ
0 K+ y! V5 ?5 m: Y3 }$ l k/ p 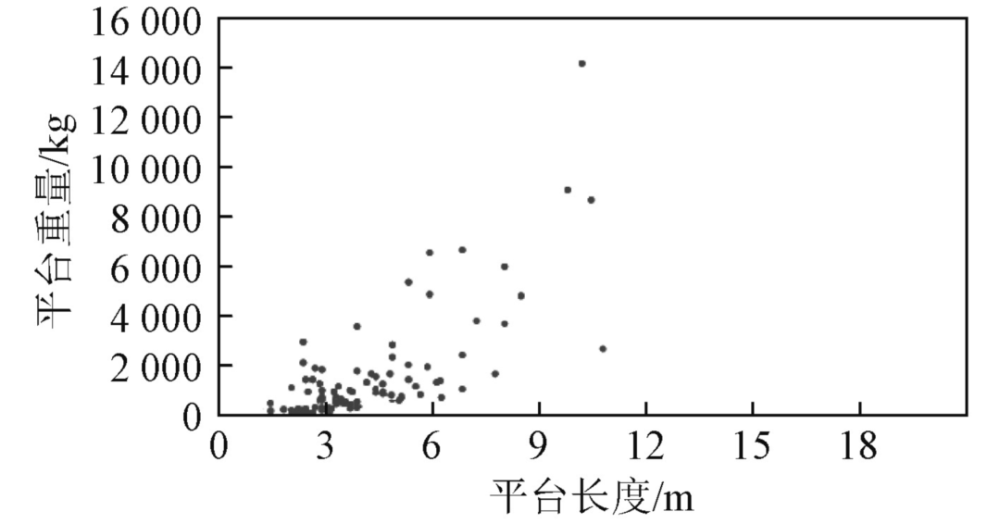 , B o- W/ ]- C1 U* K5 I
, B o- W/ ]- C1 U* K5 I
1 i( w0 U8 }' s8 p8 z
еӣҫ1 еӣҪеӨ–ж°ҙдёӢж— дәәиҲӘиЎҢеҷЁе°әеҜёйҮҚйҮҸеҲҶеёғ
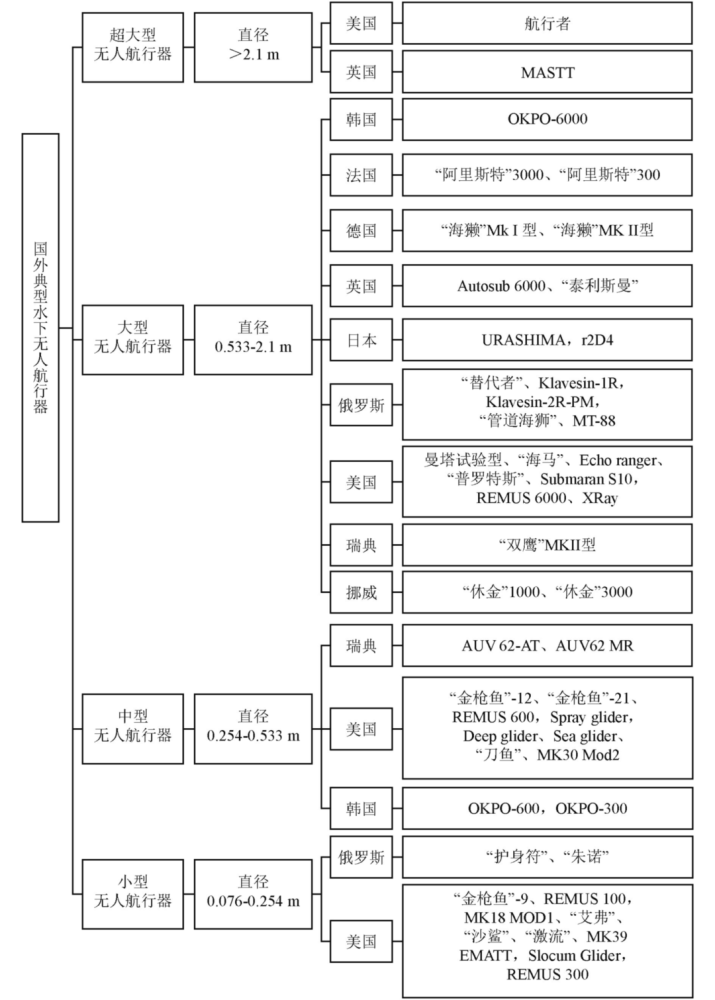
) [9 w! U6 \- f4 F3 ? еҶӣз”Ёж°ҙдёӢж— дәәиҲӘиЎҢеҷЁе…Ёзҗғе·ІеҲ—иЈ…е’ҢеңЁз ”зәҰ50еһӢпјҢжҢүз…§зҫҺжө·еҶӣеҲ’еҲҶж ҮеҮҶз»ҹи®ЎпјҢеҸҜеҲҶдёәи¶…еӨ§еһӢ2еһӢгҖҒеӨ§еһӢ22еһӢгҖҒдёӯеһӢ20еһӢгҖҒе°ҸеһӢ11еһӢгҖӮе…¶дёӯпјҢдёӯе°ҸеһӢдё»иҰҒз”ЁдәҺжғ…жҠҘзӣ‘и§ҶдҫҰеҜҹгҖҒеҸҚж°ҙйӣ·гҖҒиҜұйҘөж¬әйӘ—гҖҒжө·жҙӢи°ғжҹҘзӯүпјҢеӨ§еһӢе…је…·иҝҗиҪҪгҖҒеҸҚжҪңеҸҚиҲ°гҖҒз”өеӯҗжҲҳзӯүиғҪеҠӣпјҢи¶…еӨ§еһӢе°ҶиҝӣдёҖжӯҘе…·еӨҮзӣҙжҺҘжү“еҮ»дёҺеҜ№жҠ—зӯүдҪңжҲҳиғҪеҠӣгҖӮ
9 a5 P8 z+ \! i& i2 A
дёҖгҖҒеӣҪеӨ–еҸ‘еұ•зҺ°зҠ¶
( v) Y4 ~& C0 P* N( a( U7 b
зҺ°йҳ¶ж®өпјҢзҫҺеӣҪеҶӣз”Ёж°ҙдёӢж— дәәиҲӘиЎҢеҷЁд»Ҙе°ҸеһӢгҖҒдёӯеһӢгҖҒеӨ§еһӢе’Ңи¶…еӨ§еһӢдёәеҸ‘еұ•еәҸеҲ—пјҢе…¶дёӯеӨ§еһӢгҖҒи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁе°ҡеӨ„дәҺз ”еҲ¶йӘҢиҜҒйҳ¶ж®өпјҢжңӘжқҘе°ҶйҮҚзӮ№жӢ“еұ•дҪңжҲҳиғҪеҠӣгҖҒжҺўзҙўдҪңжҲҳеҪўејҸпјӣдёӯе°ҸеһӢж— дәәиҲӘиЎҢеҷЁе·Іе®ҢжҲҗMK18зі»еҲ—дёӯе°ҸеһӢеҸҚж°ҙйӣ·иҲӘиЎҢеҷЁгҖҒвҖңеҲҖйұјвҖқдёӯеһӢеҸҚж°ҙйӣ·иҲӘиЎҢеҷЁгҖҒLBS-GдёӯеһӢжҲҳеңәж„ҹзҹҘж°ҙдёӢж»‘зҝ”жңәзӯүиЈ…еӨҮзҡ„еҲ—иЈ…пјҢе…·еӨҮеҸҚж°ҙйӣ·гҖҒжғ…жҠҘзӣ‘и§ҶдҫҰеҜҹгҖҒжө·жҙӢзҺҜеўғжҺўжөӢзӯүе®һйҷ…дҪңжҲҳиғҪеҠӣпјҢжңӘжқҘе°ҶиҝӣдёҖжӯҘжҸҗеҚҮдҪңжҲҳж•ҲиғҪгҖӮ
5 ?" ^- v5 H+ h: A. _" v
 . \" w1 _4 O5 x- y; V: H# k" w* [
. \" w1 _4 O5 x- y; V: H# k" w* [
: \* K, O6 ] `5 |% \' g
еӣҫ2 вҖңиҷҺйІёвҖқи¶…еӨ§еһӢж— дәәж°ҙдёӢжҪңиҲӘеҷЁз•…жғіеӣҫ
/ t F$ S- R- B9 f и¶…еӨ§еһӢиҲӘиЎҢеҷЁж–№йқўд»ҘвҖңиҷҺйІёвҖқи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁдёәеҸ‘еұ•йҮҚзӮ№пјҢ2019е№ҙзҫҺжө·еҶӣжӯЈејҸеҗҜеҠЁ5иүҳвҖңиҷҺйІёвҖқз ”еҲ¶е»әйҖ и®ЎеҲ’пјҢд»ҘзҫҺеӣҪжіўйҹіе…¬еҸёвҖңеӣһеЈ°-иҲӘиЎҢиҖ…вҖқеһӢи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁдёәеҹәзЎҖиҝӣиЎҢз ”еҲ¶пјҢиҜҘеһӢиҲӘиЎҢеҷЁ2017е№ҙејҖе§ӢеҲқж¬Ўжө·иҜ•пјҢй•ҝ16mпјҢйҮҚ50tпјҢжҪңж·ұ3300mпјҢйҮҮз”Ёж··еҗҲејҸеҸҜе……з”өз”өеҠӣзі»з»ҹпјҢз»ӯиҲӘеҠӣ6дёӘжңҲпјҢ并装й…Қй•ҝиҫҫ10.2mзҡ„жЁЎеқ—еҢ–жңүж•ҲиҪҪйҮҚиҲұпјҢдё»иҰҒз”ЁдәҺжү§иЎҢжғ…жҠҘзӣ‘и§ҶдҫҰеҜҹгҖҒеҸҚж°ҙйӣ·гҖҒж—¶ж•Ҹжү“еҮ»д»»еҠЎпјҢе…ЁйғЁ5е…·е°ҶиҮі2022е№ҙе®ҢжҲҗдәӨд»ҳгҖӮ
( K: `4 `5 L% q6 y
еӣҫ3 вҖңиҷҺйІёвҖқи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁе№іеҸ°жҰӮеҝөеӣҫ
; u3 _1 B) l9 a1 e
 1 ?* t! A0 t* H3 Y# p e
1 ?* t! A0 t* H3 Y# p e
, b3 T; K; Y" |7 a( c' X" b еӣҫ4 еӣҪеӨ–ж°ҙдёӢж— дәәиҲӘиЎҢеҷЁе…ёеһӢиЈ…еӨҮ
8 D$ i, Z1 ?- p& T V* X( x еӨ§еһӢиҲӘиЎҢеҷЁж–№йқўд»ҘвҖңиӣҮеӨҙвҖқеӨ§еһӢиҲӘиЎҢеҷЁдёәеҸ‘еұ•йҮҚзӮ№пјҢ2016е№ҙжө·еҶӣз ”з©¶еҠһе…¬е®Өе®ҢжҲҗ900пҪһ1100nmileй•ҝиҲӘж—¶иҜ•йӘҢпјҢжҺ’ж°ҙйҮҸзәҰ10tпјҢзӣҙеҫ„зәҰ1.5mпјҢз»ӯиҲӘ30dжҲ–жӣҙй•ҝпјҢи®ЎеҲ’иғҪеӨҹз”ұвҖңеј—еҗүе°јдәҡвҖқзә§жҪңиүҮж”№иЈ…зҡ„еҜјеј№еҸ‘е°„зӯ’еҸ‘е°„гҖӮ2017е№ҙзҫҺжө·еҶӣжӯЈејҸеҗҜеҠЁ2е…·вҖңиӣҮеӨҙвҖқеӨ§еһӢиҲӘиЎҢеҷЁеҺҹеһӢж ·жңәз ”еҲ¶пјҢи®ЎеҲ’2021иҙўе№ҙе®ҢжҲҗдёӢж°ҙпјҢ2025е№ҙеүҚиҫҫеҲ°е…ЁйҖҹз”ҹдә§пјӣдёӯеһӢиҲӘиЎҢеҷЁж–№йқў2020е№ҙеҸ‘еёғдёӯеһӢиҲӘиЎҢеҷЁеҸ‘еұ•йңҖжұӮпјҢи®ЎеҲ’з ”еҸ‘е…је…·ж°ҙйқўдёҺж°ҙдёӢйұјйӣ·з®Ўеёғж”ҫеӣһ收гҖҒеҸҚж°ҙйӣ·дёҺжө·жҙӢзҺҜеўғж„ҹзҹҘиғҪеҠӣзҡ„ж–°еһӢдёӯеһӢиҲӘиЎҢеҷЁпјӣе°ҸеһӢиҲӘиЎҢеҷЁж–№йқўд»ҘRemus300еһӢиҲӘиЎҢеҷЁдёәеҺҹеһӢпјҢејҖеұ•дёӢдёҖд»Је°ҸеһӢиҲӘиЎҢеҷЁз ”еҲ¶и®әиҜҒе·ҘдҪңгҖӮ
+ t% \2 X7 q$ g 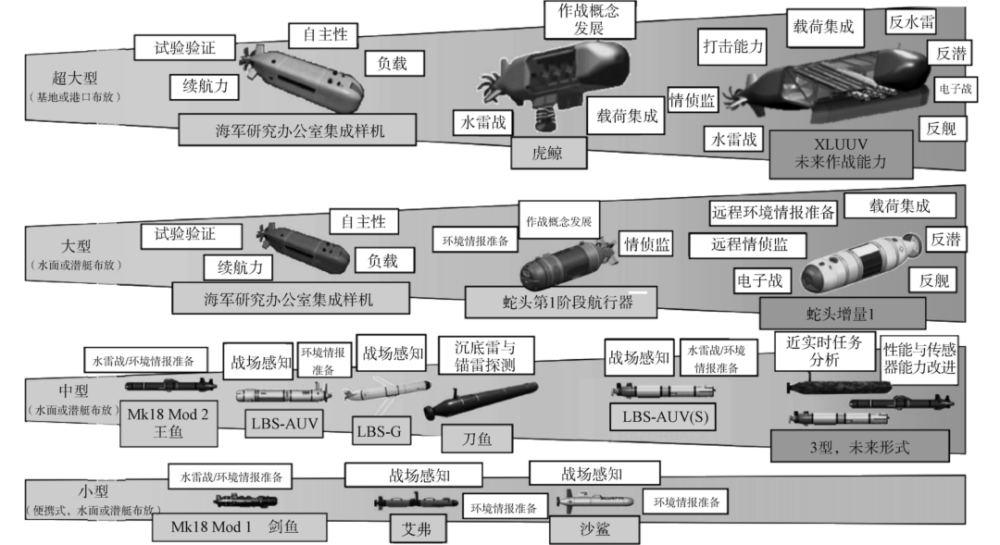 8 Q# Z% c' s! u) e
8 Q# Z% c' s! u) e
4 s/ |2 T# U6 a0 W еӣҫ5 зҫҺеӣҪеҶӣз”Ёж°ҙдёӢж— дәәиҲӘиЎҢеҷЁеҸ‘еұ•и§„еҲ’
6 T' a0 o! i( x) z( h( u дҝ„зҪ—ж–Ҝж–№йқўпјҢ2017е№ҙеҸ‘еёғгҖҠ2030е№ҙеүҚеӣҪ家жө·еҶӣиЎҢеҠЁеҹәжң¬еҺҹеҲҷгҖӢпјҢе°Ҷж°ҙдёӢж— дәәиҲӘиЎҢеҷЁдҪңдёә2025е№ҙеҗҺиЈ…еӨҮе»әи®ҫйҮҚзӮ№гҖӮзӣ®еүҚпјҢдҝ„жө·еҶӣжӯЈзЁіжӯҘжҺЁиҝӣеӨ§еһӢгҖҒе°ҸеһӢиҲӘиЎҢеҷЁеҸ‘еұ•пјҢ并еҲӣж–°еҸ‘еұ•ж ёеҠЁеҠӣж— дәәиҲӘиЎҢеҷЁгҖӮеӨ§еһӢиҲӘиЎҢеҷЁд»ҘвҖңеӨ§й”®зҗҙвҖқзі»еҲ—ж— дәәиҲӘиЎҢеҷЁдёәеҹәзЎҖз ”еҲ¶пјҢ2018е№ҙе®ҢжҲҗйӣҶжҲҗеҢ–д»»еҠЎиҪҪиҚ·и®ҫи®ЎдёҺжөӢиҜ•пјҢе…¶вҖңеӨ§й”®зҗҙвҖқIIеһӢиҲӘиЎҢеҷЁй•ҝеәҰ6.5mпјҢзӣҙеҫ„1mпјҢйҮҚ3.7пҪһ4tпјҢиҲӘзЁӢзәҰ50kmпјҢеҸҜз”ұзү№з§ҚжҪңиүҮжҗӯиҪҪпјҢз”ЁдәҺжү§иЎҢеҢ—жһҒең°еҢәжө·жҙӢи°ғжҹҘдёҺж°ҙдёӢзү№з§ҚдҪңдёҡзӯүеӨҡйЎ№д»»еҠЎгҖӮе°ҸеһӢиҲӘиЎҢеҷЁд»ҘвҖңжҠӨиә«з¬ҰвҖқгҖҒвҖңжңұиҜәвҖқзӯүиҲӘиЎҢеҷЁдёәеҹәзЎҖпјҢе…¶дёӯвҖңжңұиҜәвҖқй•ҝ2.9mпјҢзӣҙеҫ„0.2mпјҢйҮҚзәҰ80kgпјҢз»ӯиҲӘеҠӣ6hпјӣвҖңжҠӨиә«з¬ҰвҖқй•ҝ1.6mпјҢзӣҙеҫ„0.16mпјҢйҮҚ25kgпјҢиҲӘзЁӢ15kmпјҢз»ӯиҲӘеҠӣ6hпјҢеҚҮзә§зүҲй•ҝеәҰ1.45mпјҢйҮҚ17.5kgпјҢ2019е№ҙиҝӣиЎҢдәҶиҪҜ件е’ҢеҜјиҲӘзі»з»ҹеҚҮзә§д»ҘйҖӮз”ЁдәҺжү§иЎҢжғ…жҠҘзӣ‘и§ҶдҫҰеҜҹзӯүдҪңжҲҳд»»еҠЎгҖӮж ёеҠЁеҠӣж— дәәиҲӘиЎҢеҷЁйҮҚзӮ№еҸ‘еұ•е…·еӨҮж°ҙдёӢж ёжү“еҮ»иғҪеҠӣзҡ„вҖңжіўеЎһеҶ¬вҖқж ёеҠЁеҠӣиҲӘиЎҢеҷЁпјҢ并еҲ—е…Ҙдҝ„зҪ—ж–Ҝ2018-2027еӣҪ家жӯҰеӨҮи®ЎеҲ’пјҢи®ЎеҲ’10е№ҙеҶ…е®ҢжҲҗеҲ—иЈ…гҖӮ
) q7 [1 A: P [. |/ P" u
 6 ^/ {, j* m( M4 y/ `) _( v1 h ]
6 ^/ {, j* m( M4 y/ `) _( v1 h ]
* ?/ w- X" x; O( o) a& n$ V еӣҫ6 вҖңжіўеЎһеҶ¬вҖқж ёеҠЁеҠӣиҲӘиЎҢеҷЁз»“жһ„зӨәж„Ҹеӣҫ
# m8 Q; n# S) j. p" A 欧жҙІеӣҪ家方йқўйҮҚзӮ№и§„еҲ’еҸҚж°ҙйӣ·гҖҒеҸҚжҪңеһӢж°ҙдёӢж— дәәиҲӘиЎҢеҷЁеҸ‘еұ•пјҢе…ёеһӢеӣҪ家жңүжҢӘеЁҒгҖҒз‘һе…ёгҖҒжі•еӣҪгҖҒиӢұеӣҪзӯүгҖӮжҢӘеЁҒд»ҘвҖңдј‘йҮ‘вҖқгҖҒRemusзі»еҲ—иҲӘиЎҢеҷЁдёәйҮҚзӮ№пјҢеҸ‘еұ•иҲӘиЎҢеҷЁеҸҚж°ҙйӣ·гҖҒжө·жҙӢзҺҜеўғжҺўжөӢзӯүиғҪеҠӣпјӣз‘һе…ёд»ҘAUV62зі»еҲ—ж— дәәиҲӘиЎҢеҷЁдёәеҹәзЎҖпјҢйҮҚзӮ№еҸ‘еұ•иҲӘиЎҢеҷЁеҸҚж°ҙйӣ·еҸҠеҸҚжҪңжҲҳи®ӯз»ғиғҪеҠӣпјӣжі•еӣҪд»Ҙдёӯе°ҸеһӢиҲӘиЎҢеҷЁдёәеҸ‘еұ•йҮҚзӮ№пјҢдё»иҰҒеә”з”ЁдәҺеҸҚж°ҙйӣ·дҪңжҲҳпјҢе…¶дёӯжі•еӣҪECAе…¬еҸёз ”еҲ¶зҡ„ALISTER9еһӢиҲӘиЎҢеҷЁпјҢй•ҝ1.7пҪһ2.5mпјҢйҮҚйҮҸ50пҪһ90kgпјҢз»ӯиҲӘеҠӣ24hпјҢиҲӘйҖҹ3knгҖҒдё»иҰҒз”ЁдәҺеҸҚж°ҙйӣ·пјҢе·ІеҲ—е…Ҙжі•еӣҪжө·еҶӣйҮҮиҙӯи®ЎеҲ’пјӣиӢұеӣҪд»Ҙи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁдёәеҸ‘еұ•йҮҚзӮ№пјҢ2019е№ҙжҸҗеҮәи¶…еӨ§еһӢиҲӘиЎҢеҷЁеҸ‘еұ•и®ЎеҲ’пјҢд»ҘзҺ°жңүS201еһӢиҪҪдәәжҪңж°ҙеҷЁдёәеҹәзЎҖе№іеҸ°з ”еҸ‘пјҢи®ЎеҲ’й•ҝеәҰдёә30mпјҢзӣҙеҫ„2.5mпјҢйҮҚзәҰ70tпјҢйҮҮз”ЁзҮғж–ҷз”өжұ пјҢжңҖеӨ§иҲӘйҖҹ12knпјҢз»ӯиҲӘеҠӣдёә3дёӘжңҲпјҢиҲӘзЁӢзәҰдёә5500kmпјҢдё»иҰҒз”ЁдәҺжғ…жҠҘзӣ‘и§ҶдҫҰеҜҹе’ҢеҸҚжҪңзӯүд»»еҠЎгҖӮ
+ m0 {: V% L1 A0 z) y3 T3 [
 ) L9 o5 f5 K. w. @7 M1 x7 z
) L9 o5 f5 K. w. @7 M1 x7 z
/ b: R0 ^" k" S& r еӣҫ7 иӢұеӣҪи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁжҰӮеҝөеӣҫ
$ d' v5 ^" J0 ]$ }0 `
дәҡжҙІеӣҪ家з§ҜжһҒеҸ‘еұ•еҶӣз”Ёж°ҙдёӢж— дәәиҲӘиЎҢеҷЁгҖӮйҹ©еӣҪе°ҡж— еҶӣз”Ёж— дәәиҲӘиЎҢеҷЁжңҚеҪ№пјҢ2019е№ҙжҸҗеҮәеӨ§еһӢеҸҚжҪңеһӢиҲӘиЎҢеҷЁеҸ‘еұ•и®ЎеҲ’д»Ҙеә”еҜ№жңқйІңж°ҙдёӢжҪңиүҮеЁҒиғҒпјҢиҜҘеһӢиҲӘиЎҢеҷЁи®ЎеҲ’й•ҝзәҰ9mпјҢйҮҮз”ЁзҮғж–ҷз”өжұ з»ӯиҲӘиғҪеҠӣеҸҜиҫҫ30dгҖӮж—Ҙжң¬ж°‘з”Ёж— дәәиҲӘиЎҢеҷЁжҠҖжңҜж°ҙе№іиҫғй«ҳпјҢеҶӣз”Ёдә§е“Ғд»ҘйҮҮиҙӯдёәдё»пјҢзӣ®еүҚйҮҚзӮ№ејҖеұ•еҸҚж°ҙйӣ·еһӢиҲӘиЎҢеҷЁз ”еҲ¶гҖӮеҚ°еәҰж°ҙдёӢж— дәәиҲӘиЎҢеҷЁз ”еҸ‘ж°ҙе№іжңүйҷҗпјҢ2017е№ҙжҸҗеҮә8е…·й•ҝиҲӘж—¶иҲӘиЎҢеҷЁйҮҮиҙӯеҲ—иЈ…и®ЎеҲ’пјҢ规еҲ’иҮі2021е№ҙз»„е»әж°ҙдёӢж— дәәиҲӘиЎҢеҷЁдёӯйҳҹгҖӮ
( M( ]/ f, k3 ]: ?
еӣҫ8 йҹ©еӣҪеӨ§еһӢеҸҚжҪңеһӢж°ҙдёӢж— дәәиҲӘиЎҢеҷЁжҰӮеҝөеӣҫ
* u$ i% Y) q! ]6 V. K дәҢгҖҒе…ёеһӢдҪңжҲҳиҝҗз”Ё
6 k* }8 r8 ?4 h7 d* M
зӣ®еүҚпјҢеӣҪеӨ–еҲ—иЈ…еҶӣз”Ёж— дәәиҲӘиЎҢеҷЁд»Ҙжү§иЎҢжғ…жҠҘзӣ‘и§ҶдҫҰеҜҹгҖҒеҸҚж°ҙйӣ·гҖҒжө·жҙӢзҺҜеўғжҺўжөӢгҖҒиҜұйҘөзӯүд»»еҠЎдёәдё»гҖӮд»ҘзҫҺеӣҪдёәдҫӢпјҢе·ІеңЁе№ҝеҹҹжө·жҙӢзҺҜеўғдҝЎжҒҜжҗңйӣҶгҖҒеұҖйғЁжө·еҹҹй•ҝжңҹжғ…жҠҘзӣ‘и§ҶдҫҰеҜҹгҖҒй«ҳж•Ҳж— дјӨеҸҚж°ҙйӣ·зӯүж–№йқўе…·еӨҮиҫғејәдҪңжҲҳиғҪеҠӣпјҢжӯЈеңЁйҖҗжёҗеҗ‘иҒ”еҗҲеҚҸеҗҢдҪңжҲҳиҝҮжёЎпјҢз§ҜжһҒеҸ‘еұ•еҚҸеҗҢеҸҚжҪңе’Ңж°ҙдёӢжү“еҮ»зӯүд»»еҠЎиғҪеҠӣпјҢдҪңжҲҳе®ҡдҪҚйҖҗжёҗз”ұжҲҳеңәдҝқйҡңиҪ¬еҗ‘ж°ҙдёӢдҪңжҲҳзҡ„е…ій”®иҰҒзҙ пјҢдҪҝе‘Ҫд»»еҠЎд№ҹйҡҸд№ӢеӨ§е№…жӢ“еұ•гҖӮ
. I4 Z) f4 I/ }. g. j. D$ { жө·жҙӢзҺҜеўғжҺўжөӢ
9 x% V$ @, ]' m, B* X3 ?6 \5 E иҲӘиЎҢеҷЁй…ҚзҪ®жё©зӣҗж·ұжөӢйҮҸд»ӘгҖҒжө·жөҒеү–йқўд»ӘгҖҒзЈҒеҗ‘дј ж„ҹеҷЁзӯүиҙҹиҪҪпјҢжҢүйў„и®ҫжЁЎејҸжү§иЎҢд»»еҠЎпјҢжөӢйҮҸ收йӣҶжө·жҙӢзҺҜеўғж•°жҚ®пјҢж”Ҝж’‘жө·жҲҳеңәзҺҜеўғе»әи®ҫгҖӮж°ҙдёӢж»‘зҝ”жңәдҪңдёәдёҖз§ҚдҪҺеҠҹиҖ—й•ҝиҲӘж—¶иҲӘиЎҢеҷЁеңЁжө·жҙӢзҺҜеўғжҺўжөӢйўҶеҹҹеҫ—еҲ°е№ҝжіӣеә”з”ЁпјҢеҸҜз”ұж°ҙйқўиҲ°иүҮеңЁд»»еҠЎеҢәеӨ–еёғж”ҫпјҢд»»еҠЎжө·еҢәеҲ©з”Ёд»»еҠЎиҙҹиҪҪ收йӣҶж°ҙдёӢзҺҜеўғж•°жҚ®пјҢ并е®ҡжңҹдёҠжө®иҮіж°ҙйқўеҸ‘йҖҒж•°жҚ®гҖҒжҺҘ收жҢҮд»ӨпјҢж ЎеҮҶдҪҚзҪ®дёҺиҲӘзәҝдҝЎжҒҜгҖӮеӨҡдёӘж»‘зҝ”жңәз»„жҲҗи§ӮжөӢйҳөеҲ—еҸҜиҝӣиЎҢеӨ§иҢғеӣҙгҖҒй•ҝж—¶й—ҙеҗҢжӯҘи§ӮжөӢгҖӮ2006е№ҙзҫҺжө·еҶӣеҲ©з”ЁвҖңеёғжі•зҪ—вҖқеҸ·ж ёжҪңиүҮйҰ–ж¬Ўе®һзҺ°ж»‘зҝ”жңәеёғж”ҫпјҢеҲ©з”Ё5еӨ©ж—¶й—ҙеҜ№еӨҸеЁҒеӨ·з“ҰиғЎеІӣжө·еҹҹжө·жҙӢзҺҜеўғдҝЎжҒҜиҝӣиЎҢжҗңйӣҶгҖӮ2010е№ҙзҫҺжө·еҶӣе°Ҷж°ҙдёӢж»‘зҝ”жңәдҪңдёәеҲ¶ејҸиЈ…еӨҮпјҢзҙҜи®ЎйҮҮиҙӯ180дҪҷеҸ°пјҢе·Із”ЁдәҺеҶ°дёӢгҖҒиҝңжө·гҖҒиҝ‘жө·зӯүеӨҡдёӘеҢәеҹҹз»јеҗҲжө·жҙӢи§ӮжөӢдҪ“зі»пјҢ并计еҲ’й…ҚеӨҮйғЁеҲҶвҖңйҳҝеҲ©В·дјҜе…ӢвҖқзә§й©ұйҖҗиҲ°гҖӮ2011е№ҙзҫҺжө·еҶӣ3еҸ°ж»‘зҝ”жңәйҰ–ж¬ЎеҸӮеҠ ж„ҸеӨ§еҲ©иҘҝиҘҝйҮҢжө·еҹҹеҸҚжҪңжј”д№ пјҢиҝӣиЎҢдәҶ1000ж¬Ўдј еҜјжҖ§гҖҒжё©еәҰгҖҒж·ұеәҰпјҲCTDпјүжөӢйҮҸпјҢиҰҶзӣ–иҢғеӣҙжҳҜж°ҙйқўиҲ°иҲ№зҡ„10еҖҚгҖӮ2016е№ҙзҫҺеҲ©з”ЁдҫҰеҜҹиҲ№еңЁеҚ—дёӯеӣҪжө·жҠ•ж”ҫ1еҸ°LBS-GеһӢж»‘зҝ”жңәжү§иЎҢдҫҰеҜҹд»»еҠЎгҖӮ
# x2 g1 v& I1 k( b8 \3 x
 + X( p F" c( P# ~
+ X( p F" c( P# ~
: e& Y7 E/ a* ~1 f
еӣҫ9 ж°ҙдёӢж»‘зҝ”жңәжө·жҙӢзҺҜеўғжҺўжөӢ
- I% X9 x4 {: w. ?5 z& b. p6 s еҸҚж°ҙйӣ·
- K7 }4 w3 v$ C, l иҲӘиЎҢеҷЁй…ҚзҪ®жҺўжөӢиҙҹиҪҪдёҺе°ҸеһӢжӯҰеҷЁпјҢиҮӘдё»иҲӘиЎҢиҮійӣ·еҢәпјҢиҮӘдё»еҚҸеҗҢжҗңзҙўе®ҡдҪҚж°ҙйӣ·пјҢеј•зҲҶзҒӯйҷӨж°ҙйӣ·пјҢжҲ–е°Ҷж°ҙйӣ·дҪҚзҪ®еӣһдј пјҢз”ЁдәҺ规еҲ’е®үе…ЁиҲӘзәҝгҖӮ2003е№ҙдјҠжӢүе…ӢжҲҳдәүжңҹй—ҙпјҢзҫҺжө·еҶӣ第дёҖзү№з§Қжё…жү«йҳҹеҲ©з”ЁREMUS100еһӢиҲӘиЎҢеҷЁиҝӣиЎҢдәҶжҺўйӣ·е®һжҲҳйӘҢиҜҒгҖӮ2014е№ҙзҫҺеӣҪеӣҪйҳІдҫӣеә”е•ҶеҹәдәҺвҖңйҮ‘жһӘйұјвҖқзі»еҲ—иҲӘиЎҢеҷЁиҝӣиЎҢдәҶзј–йҳҹеҸҚж°ҙйӣ·дҪңжҲҳж•ҲиғҪиҜ„дј°гҖӮ2017е№ҙзҫҺжө·еҶӣе®ҢжҲҗвҖңеҲҖйұјвҖқеҸҚж°ҙйӣ·иҲӘиЎҢеҷЁеңЁдёҚеҗҢж·ұеәҰзҢҺйӣ·иғҪеҠӣжөӢиҜ•гҖӮ
+ A* \( [5 L' }6 a5 i0 j
жғ…жҠҘзӣ‘и§ҶдҫҰеҜҹ
' L- o- [9 Y' ~( b% e
иҲӘиЎҢеҷЁй…ҚзҪ®е…үеӯҰе’ҢеЈ°еӯҰи®ҫеӨҮпјҢжҠөиҝ‘дј з»ҹе№іеҸ°йҡҫд»Ҙиҝӣе…ҘжҲ–жңүдәүи®®зҡ„иҲӘйҒ“гҖҒжёҜеҸЈе’Ңеҹәең°зӯүзӣ®ж Үйҷ„иҝ‘пјҢжү§иЎҢдҫҰеҜҹзӣ‘и§ҶгҖҒиҲ°иүҮзү№еҫҒдҝЎеҸ·жөӢйҮҸзӯүд»»еҠЎгҖӮеҲ©з”ЁеҚ•иҲӘиЎҢеҷЁжҲ–иҲӘиЎҢеҷЁйӣҶзҫӨйғЁзҪІеңЁи·қзҰ»еҜ№жҠ—ж–№жёҜеҸЈиҝ‘жө·еҢәжңәеҠЁиҲӘиЎҢпјҢжү§иЎҢзӣ‘и§ҶгҖҒдҝЎеҸ·жғ…жҠҘ收йӣҶгҖҒжёҜеҸЈеӣҫеғҸжү«жҸҸгҖҒж°ҙдёӢең°еҪўжөӢз»ҳзӯүд»»еҠЎпјҢеҪўжҲҗжҢҒз»ӯеҜ№еІёзӣ‘и§ҶжҖҒеҠҝгҖӮ2018е№ҙзҫҺзӣҹеӣҪжІҷзү№жҲҗеҠҹиҝҗз”ЁREMUS600еһӢж— дәәиҲӘиЎҢеҷЁиҝӣе…Ҙд№ҹй—Ёжө·еҹҹпјҢжҠөиҝ‘е®ҢжҲҗй«ҳжё…еӣҫеғҸжӢҚж‘„пјҢжҲҗеҠҹж”ҜжҢҒжІҷзү№жғ…жҠҘзӣ‘и§ҶдҫҰеҜҹдҪңжҲҳд»»еҠЎпјҢйӘҢиҜҒдәҶе…¶дҪңжҲҳдҪҝз”ЁгҖӮ
' a& i) P0 c4 h
 9 D8 k2 R8 q O) I2 G6 m
9 D8 k2 R8 q O) I2 G6 m
3 Z, T8 z0 e# R2 O
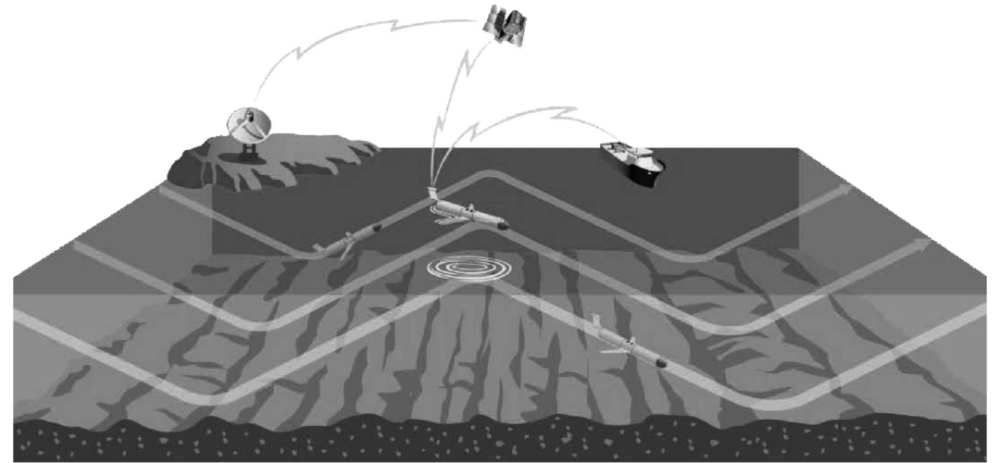
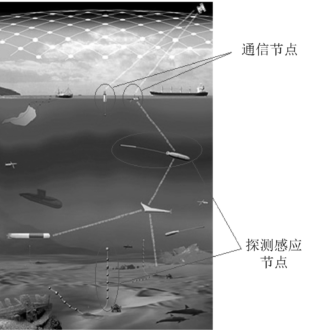
еӣҫ10 иҝ‘жө·жҢҒз»ӯж°ҙдёӢзӣ‘и§Ҷзі»з»ҹпјҲPLUSnetпјү
; F e: K2 M! t еҢәеҹҹжҺўжҪң
; h" {: J8 a& |$ J
иҲӘиЎҢеҷЁй…ҚзҪ®жҺўжөӢдёҺйҖҡдҝЎиҪҪиҚ·пјҢиҲӘиЎҢиҮізӣ®ж ҮеҢәеҹҹпјҢжҢүз…§йў„и®ҫд»»еҠЎжЁЎејҸиҮӘдё»йҒҝйҡңе·ЎиҲӘпјҢжҺўжөӢиҪҪиҚ·жҗңзҙўж•Ңж–№зӣ®ж ҮпјҢе°Ҷж•°жҚ®еӣһдј иҮіжҜҚиҲ°гҖӮе…ёеһӢдҪңжҲҳеә”з”ЁеҢ…жӢ¬иҝ‘жө·жҢҒз»ӯж°ҙдёӢзӣ‘и§Ҷзі»з»ҹпјҲPLUSnetпјүдёҺж·ұжө·еҸҚжҪңжҺўжөӢзҪ‘з»ңгҖӮе…¶дёӯпјҢиҝ‘жө·еҸҚжҪңжҺўжөӢзҪ‘з»ңгҖӮзҪ‘з»ңз”ұеӨҡеһӢгҖҒеӨҡдёӘж— дәәиҲӘиЎҢеҷЁз»„жҲҗпјҢз”ұжҪңиүҮжңәеҠЁеёғж”ҫпјҢиҲӘиЎҢеҷЁй—ҙеҸҜзӣёдә’йҖҡдҝЎпјҢжҢүйў„е®ҡи·Ҝеҫ„е·ЎйҖ»пјҢжҪңиүҮеҸҜж №жҚ®йңҖиҰҒе®һж—¶еҜ№иҲӘиЎҢеҷЁиҲӘзәҝиҝӣиЎҢи°ғж•ҙпјҢеҸҜе®һзҺ°еҢәеҹҹзӣ‘и§ҶжҺўжөӢд»»еҠЎгҖӮж·ұжө·еҸҚжҪңжҺўжөӢзҪ‘з»ңгҖӮзҪ‘з»ңз”ұеӣәе®ҡејҸжө·еә•еЈ°е‘җйҳөе’Ңж•°еҚҒдёӘиҲӘиЎҢеҷЁз»„жҲҗпјҢиҲӘиЎҢеҷЁз”ұжҜҚиүҮеёғж”ҫпјҢеә§еұ…жө·еә•жһ„жҲҗжЁӘз«–дәӨй”ҷзҡ„еЈ°е‘җвҖңжҳҹеә§вҖқпјҢиҮӘдёӢеҗ‘дёҠзӣ‘жөӢпјҢеңЁ6000mж°ҙж·ұеӨ„еӨҡдёӘиҲӘиЎҢеҷЁз»„жҲҗзҡ„вҖңжө·еә•жҳҹеә§вҖқпјҢеҸҜе®һзҺ°е№ҝеҹҹзӣ‘жөӢгҖӮ
: _+ x: u3 P' o2 X* f- ? ж°ҙдёӢжү“еҮ»
- D$ t! F$ U8 R3 c/ f" c
иҲӘиЎҢеҷЁй…ҚзҪ®жӯҰеҷЁжҲ–жӯҰеҷЁеҸ‘е°„иҲұпјҢеңЁе·ұж–№е…¶д»–е…өеҠӣжҢҮжҢҘжҺ§еҲ¶жҲ–иҮӘдё»еҶізӯ–дёӢпјҢеҜ№иҲ°иүҮзӣ®ж Үе®һж–Ҫеҝ«йҖҹжү“еҮ»гҖӮе…ёеһӢдҪңжҲҳжҰӮеҝөдёәеӨ§еһӢиҲӘиЎҢеҷЁеҜҹжү“дёҖдҪ“зі»з»ҹпјҢиҜҘзі»з»ҹз”ұеӨ§еһӢиҲӘиЎҢеҷЁжҗәеёҰеҲҶеёғејҸдј ж„ҹеҷЁзҪ‘з»ңе’ҢиҪ»еһӢйұјйӣ·жһ„жҲҗпјҢиҲӘиЎҢеҷЁз”ұжҪңиүҮеҜјеј№еҸ‘е°„зӯ’жҗәеёҰеёғж”ҫпјҢиҮӘдё»иҲӘиЎҢиҮіжҢҮе®ҡдҪңжҲҳеҢәеҹҹжҪңдјҸеңЁжө·еә•пјҢжҗӯиҪҪ8еҜ№жҷәиғҪдј ж„ҹеҷЁе’ҢжңҖеӨҡ4жһҡиҪ»еһӢйұјйӣ·пјҢиҮӘдё»еёғж”ҫе…үзјҶдёҺдј ж„ҹеҷЁеҪўжҲҗзҪ‘з»ңпјҢ并йҖҡиҝҮе…үзјҶдёҺиҲӘиЎҢеҷЁиҝһжҺҘејҖеұ•еҢәеҹҹжҺўжөӢпјҢеҸ‘зҺ°еҸҜз–‘зӣ®ж Ү并确и®ӨеҗҺиҲӘиЎҢеҷЁеҚіеҸҜеҸ‘е°„йұјйӣ·ж”»еҮ»гҖӮ
2 U$ A! j! _: H: c
 - ~: }! B7 H# B
- ~: }! B7 H# B
" J. f, {9 E! `
еӣҫ 11 еӨ§еһӢиҲӘиЎҢеҷЁеҜҹжү“дёҖдҪ“зі»з»ҹ
( U; } I0 {: n дёүгҖҒдё»иҰҒжҠҖжңҜеҸ‘еұ•
# z& @6 i1 H% z7 |) z6 k! o
ж°ҙдёӢж— дәәиҲӘиЎҢеҷЁжҢүз…§е…¶дё»иҰҒзі»з»ҹжһ„жҲҗдёҺеёғж”ҫдҪҝз”ЁпјҢеҸҜеҲҶдёәиҲӘиЎҢеҷЁжҖ»дҪ“жҠҖжңҜгҖҒиғҪжәҗеҠЁеҠӣжҠҖжңҜгҖҒжҺ§еҲ¶жҠҖжңҜгҖҒеҜјиҲӘжҠҖжңҜгҖҒйҖҡдҝЎжҠҖжңҜгҖҒд»»еҠЎиҪҪиҚ·жҠҖжңҜдёҺдҝқйҡңжҠҖжңҜзӯү7дёӘжҠҖжңҜж–№еҗ‘гҖӮ
( {2 x8 |1 `- U- j5 } еӣҫ12 ж°ҙдёӢж— дәәиҲӘиЎҢеҷЁдё»иҰҒжҠҖжңҜж–№еҗ‘
( m; K- h- W- k3 d$ Z8 h* U жҖ»дҪ“жҠҖжңҜ
+ A: ^' w; m- E9 e иҲӘиЎҢеҷЁжҖ»дҪ“з»“жһ„д»ҘеӣһиҪ¬дҪ“еһӢдёәдё»пјҢйқһеӣһиҪ¬дҪ“гҖҒд»ҝз”ҹзӯүејӮжһ„дҪ“жҳҜйҮҚиҰҒеҸ‘еұ•ж–№еҗ‘гҖӮ2014е№ҙзҫҺеӣҪз ”еҲ¶е®ҢжҲҗвҖңе№ҪжііиҖ…вҖқзӯүеӨҡеһӢд»ҝз”ҹиҲӘиЎҢеҷЁпјҢйҖҡиҝҮж‘ҶеҠЁе°ҫйіҚеүҚиҝӣпјҢе…·еӨҮй«ҳжңәеҠЁиҲӘиЎҢдёҺйҡҗи”ҪдҪңжҲҳиғҪеҠӣпјҢеҸҜдёәжү§иЎҢжғ…жҠҘзӣ‘и§ҶдҫҰеҜҹд»»еҠЎжҸҗдҫӣжӣҙеҘҪзҡ„е®үе…Ёдҝқйҡңпјӣ2017е№ҙпјҢиӢұеӣҪжө·еҶӣеҸ‘еёғжңӘжқҘжҰӮеҝөжҪңиүҮеҸҠиҲӘиЎҢеҷЁи®ҫи®ЎпјҢжҸҗеҮәвҖңйі—йұјвҖқгҖҒвҖңйЈһйұјвҖқзӯүеӨҡеһӢд»ҝз”ҹеһӢиҲӘиЎҢеҷЁжҰӮеҝөгҖӮз»“жһ„и®ҫи®ЎдёҺж–°жқҗж–ҷеә”з”Ёж–№йқўпјҢеӣҪеӨ–еӨ§йҮҸйҮҮз”ЁйқһйҮ‘еұһзӯүиҪ»иҙЁжқҗж–ҷпјҢзҫҺеӣҪе·ІйҮҮиҙӯвҖңеҲҖйұјвҖқж— дәәиҲӘиЎҢеҷЁйҮҮз”Ёй“қеҗҲйҮ‘гҖҒеӨҡеұӮеӨҚеҗҲжқҗж–ҷе’ҢејәеҢ–зҺ»з’ғй’ўпјҢ并йҮҮз”ЁеӨҚеҗҲжқҗж–ҷиһәж—ӢжЎЁпјҢжңүж•ҲйҷҚдҪҺдәҶиҮӘиә«йҮҚйҮҸгҖӮ
3 Z6 v. P, U' y( z6 Z2 } иғҪжәҗеҠЁеҠӣжҠҖжңҜ
U2 ?2 t7 [! ]: o
иҲӘиЎҢеҷЁзӣ®еүҚд»ҘеҸҜе……з”өй”Ӯз”өжұ дёәдё»иҰҒиғҪжәҗпјҢиҲӘйҖҹдёҖиҲ¬дёҚи¶…иҝҮ5knпјҢзҫҺеӣҪвҖңйҮ‘жһӘйұјвҖқ-21еһӢиҲӘиЎҢеҷЁ3knиҲӘйҖҹдёӢеҸҜжҢҒз»ӯиҲӘиЎҢ25hпјӣзҮғж–ҷз”өжұ зӣ®еүҚеӣҪеӨ–д»…еңЁе°‘ж•°е•Ҷз”ЁжҲ–иҜ•йӘҢиҲӘиЎҢеҷЁдҪҝз”ЁпјҢеңЁз ”ж–°еһӢзҮғж–ҷз”өжұ иғҪйҮҸеҜҶеәҰжңҖй«ҳеҸҜиҫҫ725Wh/kgгҖӮжІ№з”өж··еҗҲеҠЁеҠӣжҳҜи¶…еӨ§еһӢиҲӘиЎҢеҷЁйҮҚиҰҒйҖүжӢ©ж–№еҗ‘д№ӢдёҖпјҢз‘һе…ёгҖҒжі•еӣҪгҖҒиӢұеӣҪе’ҢзҫҺеӣҪеқҮејҖеұ•дәҶзӣёе…із ”究е·ҘдҪңпјҢ并е®һзҺ°е°ҸеһӢжІ№з”өж··еҗҲеҠЁеҠӣиҲұзҡ„иҲӘиЎҢеҷЁйҖӮй…Қз ”еҲ¶пјҢзҫҺеӣҪвҖңиҲӘиЎҢиҖ…вҖқи¶…еӨ§еһӢиҲӘиЎҢеҷЁйҮҮз”ЁжІ№з”өж··еҗҲеҠЁеҠӣпјҢеҸҜе®һзҺ°иҲӘзЁӢ6500kmгҖӮжҺЁиҝӣеҷЁд»Ҙиһәж—ӢжҺЁиҝӣдёәдё»пјҢ并ејҖе§Ӣиҝҗз”Ёжіөе–·гҖҒе–·ж°ҙжҺЁиҝӣгҖҒд»ҝз”ҹжҺЁиҝӣзӯүж–°еһӢжҺЁиҝӣеҪўејҸгҖӮж–°жҠҖжңҜжҺўзҙўж–№йқўпјҢдё»иҰҒйҖҡиҝҮе»әз«Ӣж°ҙдёӢе……з”өз«ҷжҸҗеҚҮиҲӘиЎҢеҷЁжҢҒд№…дҪңдёҡиғҪеҠӣгҖӮ2007е№ҙзҫҺеӣҪеҗҜеҠЁж°ҙдёӢжҜҚжёҜз ”з©¶пјҢ2018е№ҙе®ҢжҲҗеӮЁз”өйҮҸ200kWhгҖҒе·ҘдҪңж·ұеәҰ3000mзҮғж–ҷз”өжұ ж°ҙдёӢе……з”өз«ҷз ”еҲ¶пјӣ2017е№ҙдҝ„зҪ—ж–ҜжҸҗеҮәж°ҙдёӢж ёиғҪе……з”өз«ҷжҠҖжңҜпјҢи®ЎеҲ’е»әз«ӢиҪҪжңүж ёеҸҚеә”е Ҷзҡ„ж— дәәе……з”өз«ҷзҪ‘з»ңгҖӮ
% `& S! K+ q, P M' M9 \
жҺ§еҲ¶жҠҖжңҜ
. k1 y5 R/ F- t9 B8 Z- R# L% @- L ж°ҙдёӢиҮӘдё»жҺ§еҲ¶жҠҖжңҜжҳҜж— дәәиҲӘиЎҢеҷЁжҺ§еҲ¶жҠҖжңҜеҸ‘еұ•йҮҚзӮ№пјҢзӣ®еүҚеӣҪеӨ–е·Іе®һзҺ°йў„е®ҡи·Ҝеҫ„дёҖе®ҡзЁӢеәҰзҡ„иҮӘдё»еҲӨж–ӯпјҢжӯЈеңЁејҖеұ•иҮӘдё»жҺўжөӢе®ҡдҪҚиҜҶеҲ«гҖҒзӣ®ж Үж„ҸеӣҫеҲӨж–ӯгҖҒжё”зҪ‘жё”е…·зӣ®ж Ү规йҒҝзӯүд»»еҠЎиғҪеҠӣе»әи®ҫпјҢз§ҜжһҒеҸ‘еұ•йқўеҗ‘д»»еҠЎзҡ„дҝЎжҒҜеӨ„зҗҶдёҺж·ұеәҰеӯҰд№ иғҪеҠӣгҖӮеңЁзҫҺеӣҪеӨ§еһӢгҖҒи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁз ”еҲ¶дёӯпјҢд№ҹе°Ҷж°ҙдёӢиҮӘдё»йҒҝйҡңгҖҒж°ҙйқўйҡңзўҚ规йҒҝдёҺиҮӘдё»еҶізӯ–гҖҒжё”зҪ‘规йҒҝдёҺиҮӘдё»и„ұеӣ°дҪңдёәе…ій”®иғҪеҠӣз”ұеҶӣж–№дё»еҜјжҺЁиҝӣгҖӮ
; k% [/ ]( x0 y% U; S8 E- s) S. _
еҚҸеҗҢжҺ§еҲ¶д»Ҙж°ҙдёӢжңүдәәж— дәәеҚҸеҗҢдёҺж°ҙдёӢж— дәәйӣҶзҫӨжҺ§еҲ¶дёәйҮҚзӮ№ж–№еҗ‘пјҢеңЁж°ҙдёӢжңүдәәж— дәәеҚҸеҗҢж–№йқўпјҢ2016е№ҙзҫҺжө·еҶӣе·ІйҖҡиҝҮж— дәәжңәдҪңдёәйҖҡдҝЎдёӯ继пјҢе®һзҺ°ж°ҙдёӢжңүдәәе№іеҸ°еҜ№ж— дәәиҲӘиЎҢеҷЁзҡ„иҝңзЁӢжҺ§еҲ¶пјҢ并еңЁ2017пҪһ2019е№ҙжө·еҶӣе…ҲиҝӣжҠҖжңҜдёӯйҮҚзӮ№еұ•зӨәдәҶд»ҘеҚ«жҳҹдёәйҖҡдҝЎдёӯ继зҡ„жңүдәәж— дәәиҝңзЁӢжҺ§еҲ¶еҚҸеҗҢдҪңжҲҳжһ„жғіпјӣеңЁж°ҙдёӢж— дәәйӣҶзҫӨжҺ§еҲ¶ж–№йқўпјҢ2019е№ҙзҫҺжө·еҶӣе®һзҺ°ж•°еҚҒиүҳSwarmDiverеҫ®еһӢиҲӘиЎҢеҷЁйӣҶзҫӨзј–йҳҹжҺ§еҲ¶пјҢйҮҮз”ЁиңӮжӢҘз®—жі•жҺ§еҲ¶дёҺж°ҙйқўж— зәҝз”өйҖҡдҝЎжЁЎејҸпјҢе®һзҺ°еӨҡиҲӘиЎҢеҷЁд»»еҠЎеҲҶй…ҚдёҺеҚҸеҗҢи·Ҝеҫ„规еҲ’гҖӮ
; v; D5 v) |' N еҜјиҲӘжҠҖжңҜ
7 B# k( d5 P3 P" g# O9 J) a ж°ҙдёӢж— дәәиҲӘиЎҢеҷЁд»Ҙз»„еҗҲејҸеҜјиҲӘдёәдё»пјҢдё»жөҒеҪўејҸдёәжғҜжҖ§еҜјиҲӘзі»з»ҹй…ҚеҗҲеӨҡжҷ®еӢ’еЈ°е‘җи®ЎзЁӢд»ӘдёҺGPSе®ҡдҪҚзі»з»ҹпјҢиҫ…еҠ©еҜјиҲӘи®ҫеӨҮдё»иҰҒеҢ…жӢ¬еЈ°еӯҰе®ҡдҪҚзі»з»ҹгҖҒзЈҒзҪ—з»ҸзӯүгҖӮзӣ®еүҚпјҢзҫҺеӣҪвҖңйҮ‘жһӘйұјвҖқ-21BPAUVз»„еҗҲеҜјиҲӘзІҫеәҰеҸҜиҫҫеҲ°иҲӘзЁӢзҡ„0.1%пјҢи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁеңЁж— иҫ…еҠ©еҜјиҲӘжғ…еҶөдёӢз»„еҗҲеҜјиҲӘзІҫеәҰдёәиҲӘзЁӢзҡ„0.15%пјҢеӣҪеҶ…иҲӘиЎҢеҷЁз»„еҗҲеҜјиҲӘзІҫеәҰеӨҡдёәиҲӘзЁӢзҡ„0.3%гҖӮжӯӨеӨ–пјҢ2016е№ҙзҫҺеӣҪеӣҪйҳІй«ҳзә§з ”究计еҲ’еұҖпјҲDARPAпјүжҸҗеҮәж°ҙдёӢеҹәз«ҷејҸе®ҡдҪҚеҜјиҲӘжҰӮеҝөпјҢйҖҡиҝҮеңЁжө·еә•йғЁзҪІе°‘йҮҸзҡ„еЈ°жәҗдҝЎж ҮпјҢдҪҝж— дәәиҲӘиЎҢеҷЁе…·еӨҮж°ҙдёӢй•ҝиҲӘж—¶зІҫзЎ®еҜјиҲӘзҡ„иғҪеҠӣгҖӮ
* `. p' H% N; ?' N8 i 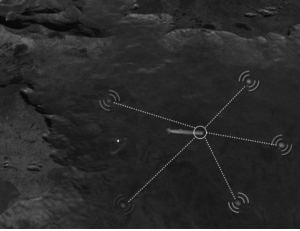 6 i9 |/ u& h( E
6 i9 |/ u& h( E
3 h9 N2 C3 X, r/ n" R
еӣҫ13 ж°ҙдёӢеҹәз«ҷејҸе®ҡдҪҚеҜјиҲӘжҰӮеҝө
# Z% s, C& a G$ b: V( v6 u йҖҡдҝЎжҠҖжңҜ
8 b% ^$ X7 A# z
иҲӘиЎҢеҷЁж°ҙдёӢйҖҡдҝЎд»Ҙж°ҙеЈ°йҖҡдҝЎдёәдё»пјҢеӣҪеӨ–иҲӘиЎҢеҷЁе…Ҳиҝӣж°ҙеЈ°йҖҡдҝЎзі»з»ҹ10пҪһ20kmиҢғеӣҙеҶ…йҖҡдҝЎйҖҹзҺҮиҫҫ330bpsпјӣж°ҙйқўйҖҡдҝЎпјҢи¶…зҹӯжіўж— зәҝз”өйҖҡдҝЎж–№ејҸйҖҡдҝЎйҖҹзҺҮи¶…иҝҮ10kbpsпјҢеҫ®жіўйҖҡдҝЎдҫқйқ дҪҺиҪЁйҒ“й“ұжҳҹйҖҡдҝЎпјҢдё»иҰҒз”ЁдәҺиҲӘиЎҢеҷЁдёҺеІёдёҠжҢҮжҢҘдёӯеҝғгҖҒжҜҚиүҮгҖҒж— дәәжңәзӯүзҡ„еӨ§дҝЎжҒҜйҮҸзҹӯж—¶йҖҡдҝЎпјҢйҖҡдҝЎйҖҹзҺҮзәҰ115.2kbpsгҖӮ2018е№ҙзҫҺеӣҪеҲ©з”ЁжҜ«зұіжіўйӣ·иҫҫйҖҡиҝҮжҺўжөӢж°ҙеЈ°дҝЎеҸ·еҜ№ж°ҙйқўйҖ жҲҗзҡ„еҫ®е°ҸжҢҜеҠЁпјҢйҰ–ж¬Ўе®һзҺ°ж°ҙдёӢиҠӮзӮ№зӣҙжҺҘдёҺз©әдёӯиҠӮзӮ№и·Ёд»ӢиҙЁйҖҡдҝЎпјҢйҖҡдҝЎйҖҹзҺҮиҫҫеҲ°400bpsпјӣ2017е№ҙж—Ҙжң¬еңЁж°ҙж·ұ700пҪһ800mе®ҢжҲҗж°ҙдёӢ移еҠЁзү©дҪ“й—ҙи“қз»ҝжҝҖе…үйҖҡдҝЎпјҢйҖҡдҝЎи·қзҰ»и¶…иҝҮ100mпјҢйҖҡдҝЎйҖҹзҺҮиҫҫ20MbpsпјҢ2019е№ҙејҖеҸ‘е®ҢжҲҗж°ҙдёӢе…үйҖҡдҝЎи®ҫеӨҮдә§е“ҒпјҢеҸҜе®һзҺ°10mи·қзҰ»еҶ…100Mbpsзҡ„еҸҢеҗ‘йҖҡдҝЎгҖӮ
7 T- h" |- C( [7 ?1 P1 s! s) r4 S
 4 p' l; Y: `* {) O2 x1 W D" [
4 p' l; Y: `* {) O2 x1 W D" [
2 t$ t2 o( B( d) S2 u0 I еӣҫ14 вҖң平移声еӯҰ - е°„йў‘йҖҡдҝЎвҖқжҠҖжңҜиҜ•йӘҢ
9 I* S, c- Z: T7 w# f9 r
д»»еҠЎиҪҪиҚ·жҠҖжңҜ
4 g3 Z/ d0 N/ D' U; ~2 X
иҲӘиЎҢеҷЁд»»еҠЎиҪҪиҚ·ж¶үеҸҠжҺўжөӢгҖҒдҝЎжҒҜеҜ№жҠ—гҖҒзҺҜеўғж„ҹзҹҘгҖҒжү“еҮ»зӯүеӨҡдёӘж–№йқўгҖӮжҺўжөӢиҪҪиҚ·еӣҪеӨ–дё»жөҒеҗҲжҲҗеӯ”еҫ„еЈ°е‘җиЈ…зҪ®жңҖеӨ§жү«жө·ж•ҲзҺҮдёә2.88km2/hпјҢжҲҗеғҸеҲҶиҫЁзҺҮ5cm2пјҢ3knиҲӘйҖҹжҺўжөӢи·қзҰ»260mгҖӮдҝЎжҒҜеҜ№жҠ—еӣҪеӨ–е·Іе®ҢжҲҗеҸҜжЁЎжӢҹжҪңиүҮз”өзЈҒгҖҒеЈ°еӯҰзү№еҫҒдҝЎеҸ·зҡ„иҲӘиЎҢеҷЁеҲ—иЈ…гҖӮжө·жҙӢжөӢйҮҸиҪҪиҚ·еӣҪеӨ–ж°ҙж–ҮгҖҒж°ҙеЈ°гҖҒж°ҙиҙЁгҖҒе…үеӯҰзұ»дј ж„ҹеҷЁжҠҖжңҜе…ҲиҝӣйҪҗе…ЁпјҢжӯЈеңЁејҖеұ•ж–°еһӢж°ҙеЈ°гҖҒиҫҗе°„зұ»дј ж„ҹеҷЁе’Ңеҫ®зәізұідј ж„ҹеҷЁз ”究гҖӮе°ҸеһӢеҢ–жӯҰеҷЁиҪҪиҚ·пјҢзҫҺеӣҪе·Із ”еҲ¶е®ҢжҲҗвҖңйҖҡз”Ёи¶…иҪ»еһӢйұјйӣ·вҖқпјҢзӣҙеҫ„е’ҢйҮҚйҮҸеҲҶеҲ«дёә170mmпјҢ100kgпјӣиҙҹиҪҪеҸ‘е°„дёҺеёғж”ҫж–№йқўпјҢ2017е№ҙзҫҺжө·еҶӣе·ІеҲ©з”Ёзӣҙеҫ„0.5mвҖңйҮ‘жһӘйұјвҖқ-21дёӯеһӢиҲӘиЎҢеҷЁе®ҢжҲҗзӣҙеҫ„0.12mвҖңжІҷйІЁвҖқе°ҸеһӢиҲӘиЎҢеҷЁгҖҒйҮҚ1.8kgвҖңй»‘зҝјвҖқеҫ®еһӢж— дәәжңәеёғж”ҫпјҢе…·еӨҮж— дәәжңәгҖҒе°ҸеһӢиҲӘиЎҢеҷЁзӯүиҪҪиҚ·еёғж”ҫиғҪеҠӣгҖӮжӯӨеӨ–пјҢ2018е№ҙзҫҺеӣҪDARPAжҸҗеҮәеҲ©з”Ёжө·жҙӢз”ҹзү©жҺўжөӢж•Ңж–№ж°ҙдёӢзӣ®ж Үж–°еһӢжҺўжөӢжҠҖжңҜпјҢйҖҡиҝҮејҖеҸ‘ж–°еһӢдј ж„ҹеҷЁзі»з»ҹпјҢжҺўжөӢ并记еҪ•жө·жҙӢз”ҹзү©еҜ№з”өгҖҒеЈ°гҖҒзЈҒгҖҒеҢ–еӯҰе’Ңе…үеӯҰеҲәжҝҖзҡ„иЎҢдёәж„ҹзҹҘпјҢж”ҜжҢҒж°ҙдёӢж— дәәиҲӘиЎҢеҷЁе®һзҺ°еҜ№ж°ҙдёӢзӣ®ж Үзҡ„жҺўжөӢгҖӮ
; N. H( [ W* m- e( V i% i$ ~& Y6 Q# ]
еёғж”ҫеӣһ收жҠҖжңҜ
" r4 r( P9 r; R2 b Y
дҝқйҡңжҠҖжңҜдё»иҰҒж¶үеҸҠUUVеёғж”ҫдёҺеӣһ收гҖҒж°ҙдёӢй•ҝжңҹй©»з•ҷзӯүж–№йқўгҖӮж°ҙдёӢж— дәәиҲӘиЎҢеҷЁзҡ„еёғж”ҫдёҺеӣһ收еҸҜиҝҗз”Ёж°ҙйқўжҜҚиҲ№зҡ„еҗҠиүҮжһ¶гҖҒеқЎйҒ“зӯүе®һзҺ°пјҢи¶…еӨ§еһӢиҲӘиЎҢеҷЁеҸҜд»Һеҹәең°жёҜеҸЈеёғж”ҫгҖӮжӯӨеӨ–пјҢзҫҺжө·еҶӣиҮӘ20дё–зәӘ90е№ҙд»ЈејҖе§ӢеҸ‘еұ•жҪңиҪҪж— дәәиҲӘиЎҢеҷЁеёғж”ҫеӣһ收жҠҖжңҜгҖӮ2013е№ҙеҲ©з”Ёзӣҙеҫ„1.5mзҡ„вҖң马жһ—вҖқиҲӘиЎҢеҷЁеңЁжҪңиүҮеҜјеј№еҸ‘е°„зӯ’жЁЎжӢҹиЈ…зҪ®пјҲзӣҙеҫ„2.2mпјүиҝӣиЎҢдәҶ73ж¬Ўеёғж”ҫеӣһ收иҜ•йӘҢпјҢ2015е№ҙзҫҺжө·еҶӣжҲҗеҠҹе®ҢжҲҗдёӯеһӢиҲӘиЎҢеҷЁж”»еҮ»еһӢж ёжҪңиүҮйұјйӣ·з®Ўеёғж”ҫеӣһ收иҜ•йӘҢгҖӮж°ҙдёӢй•ҝжңҹй©»з•ҷпјҢзҫҺеӣҪз ”еҲ¶е®ҢжҲҗйў„зҪ®зі»з»ҹеҸҜеңЁ2000пҪһ6000mж·ұжө·жҪңдјҸ5е№ҙ并дҝқжҢҒдҪңжҲҳиғҪеҠӣгҖӮ
* U5 z( I2 b. b' q* U! A" I- e 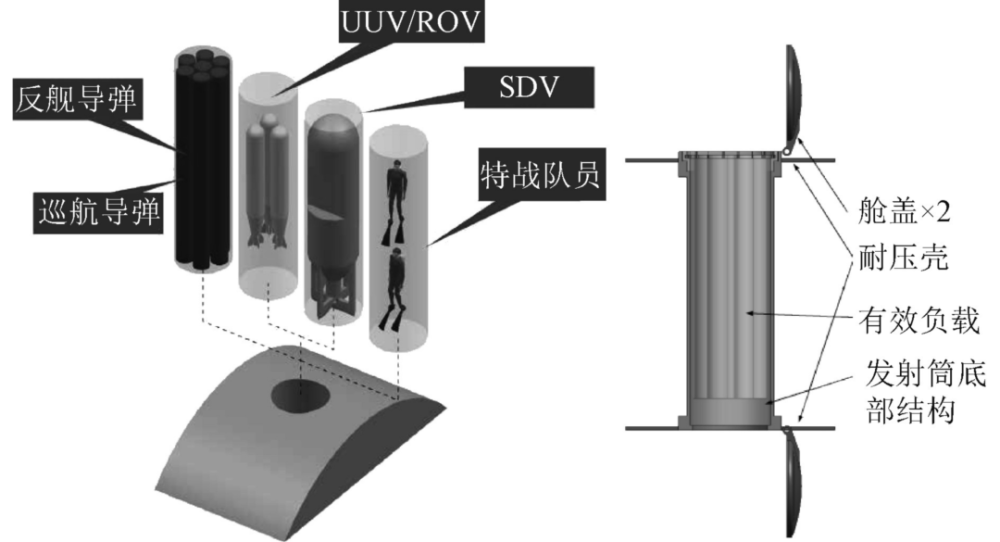 6 m+ O( }& {1 g1 h k
6 m+ O( }& {1 g1 h k
# b6 \, C/ P9 p; I; E еӣҫ15 жҪңиүҮеҜјеј№еҸ‘е°„зӯ’жЁЎжӢҹиЈ…зҪ®
: q6 T6 ]- [/ Z: Y7 e1 o еӣӣгҖҒз»“иҜӯ
" O N U8 V* g7 r+ d" } ж°ҙдёӢж— дәәиҲӘиЎҢеҷЁдёҚж–ӯеҗ‘жҲҗзҶҹиҝҲиҝӣпјҢдҪңжҲҳиҢғеӣҙд»Һжө…жө·еҲ°ж·ұжө·пјҢдҪҝе‘Ҫд»»еҠЎз”ұиҫ…еҠ©дҪңжҲҳиө°еҗ‘ж”ҜжҢҒдҪңжҲҳпјҢиҝҗз”Ёж–№ејҸз”ұеҚ•дҪ“иө°еҗ‘йӣҶзҫӨпјҢиҝ‘дёӯжңҹе°Ҷдёәжңүдәәй«ҳд»·еҖјзӣ®ж ҮпјҲиҲӘжҜҚгҖҒжҪңиүҮзӯүпјүжһ„зӯ‘еӨ–еӣҙиӯҰжҲ’/дҫҰеҜҹе…өеҠӣпјҢдёӯиҝңжңҹе°ҶжҲҗдёәжө·дёҠеүҚеҮәе’ҢжҪңдјҸж”»еҮ»иЈ…еӨҮпјҢжҲҗдёәжө·еҶӣж”»йҳІеҠӣйҮҸзҡ„йҮҚиҰҒз»„жҲҗйғЁеҲҶгҖӮ
. K# f9 W! \$ `7 C+ Z дҪ“зі»е®ҡдҪҚе°ҶжҲҗдёәж°ҙдёӢи§Ұж•ҢдҪңжҲҳдё»иҰҒеҠӣйҮҸ
8 v' p, H8 q4 @) r
жңӘжқҘж°ҙдёӢж— дәәиҲӘиЎҢеҷЁе°ҶйҖҗжёҗжӣҝд»ЈйғЁеҲҶдј з»ҹе№іеҸ°жү§иЎҢй•ҝжңҹйҮҚеӨҚгҖҒжҢҒд№…жһҜзҮҘгҖҒйҡҗи”ҪеҚұйҷ©зҡ„д»»еҠЎпјҢз”ҡиҮіжү©еұ•е»¶дјёеҺҹжңүе№іеҸ°зҡ„жҹҗдәӣеҠҹиғҪпјҢеҰӮжӣҝд»ЈжҪңиүҮе’Ңж°ҙйқўиҲ°еңЁе…ій”®жө·еҹҹиҝӣиЎҢй•ҝж—¶й—ҙеҸҚжҪңе·ЎйҖ»пјҢжү§иЎҢжҠөиҝ‘дҫҰеҜҹгҖҒжҺўжөӢгҖҒзӣ®ж ҮжҢҮзӨәзӯүд»»еҠЎпјҢ并жүҝжӢ…дҝЎжҒҜдёӯ继гҖҒзҒ«еҠӣжү“еҮ»зӯүеҠҹиғҪпјҢйҖҗжёҗжҲҗдёәж°ҙдёӢи§Ұж•ҢжҲҳж–—еҗ„зҺҜиҠӮзҡ„дё»иҰҒеҠӣйҮҸпјҢжҳҜдҝЎжҒҜеҢ–жҲҳдәүдёӯеӨәеҸ–дҝЎжҒҜдјҳеҠҝгҖҒе®һж–ҪзІҫзЎ®жү“еҮ»гҖҒе®ҢжҲҗзү№ж®ҠдҪңжҲҳд»»еҠЎзҡ„йҮҚиҰҒжүӢж®өд№ӢдёҖгҖӮ
" N1 E/ C0 Y1 k( H' h& w1 }9 X дҪңжҲҳиҝҗз”Ёејәи°ғжңүдәәж— дәәеҚҸеҗҢдёҺж— дәәзі»з»ҹйӣҶзҫӨдҪңжҲҳ
3 h! }% s6 n, i. K& T! {. n
жңүдәәж— дәәеҚҸеҗҢгҖҒж— дәәзі»з»ҹйӣҶзҫӨдҪңжҲҳжҳҜжңӘжқҘж°ҙдёӢж— дәәиҲӘиЎҢеҷЁдҪңжҲҳиҝҗз”Ёзҡ„йҮҚиҰҒж–№еҗ‘гҖӮжңүдәәж— дәәеҚҸеҗҢдҪңжҲҳе……еҲҶеҲ©з”Ёжңүдәәе№іеҸ°зҡ„дҝЎжҒҜеӨ„зҗҶгҖҒеҚҸеҗҢз»„з»Үе’ҢеҶізӯ–иғҪеҠӣпјҢж— дәәе№іеҸ°зҡ„йҡҗиә«жҖ§гҖҒй•ҝз»ӯиҲӘжҖ§гҖҒйӣҶзҫӨжҖ§зӯүзү№зӮ№пјҢиҝӣдёҖжӯҘжҸҗеҚҮдҪ“зі»зҡ„еҚҸеҗҢжҖҒеҠҝж„ҹзҹҘиғҪеҠӣеҸҠеҚҸеҗҢж”»еҮ»иғҪеҠӣпјҢе®һзҺ°ж„ҹзҹҘжҺўжөӢиғҪеҠӣгҖҒеҲҶжһҗеҶізӯ–иғҪеҠӣгҖҒеҚҸеҗҢжү“еҮ»иғҪеҠӣзҡ„дјҳеҢ–з»„еҗҲдёҺй…ҚзҪ®пјҢжҸҗеҚҮдҪ“зі»з”ҹеӯҳиғҪеҠӣгҖӮж— дәәйӣҶзҫӨдҪңжҲҳе°ҶеҪўжҲҗз©әдёӯгҖҒж°ҙйқўгҖҒж°ҙдёӢеӨҡз»ҙеәҰз«ӢдҪ“ејҸзҡ„дҪңжҲҳзҪ‘з»ңпјҢжӢҘжңүдј з»ҹе№іеҸ°жүҖдёҚе…·еӨҮзҡ„йҡҗи”ҪгҖҒжҠ—жҚҹгҖҒеҸҜйҮҚжһ„зӯүзү№зӮ№пјҢжҲҗдёәжү“дёҚеһ®зҡ„еүҚжІҝдҫҰеҜҹгҖҒзӣ‘и§ҶдёҺжү“еҮ»еҠӣйҮҸгҖӮ
' v+ W& b0 }9 t
зі»з»ҹе№іеҸ°ејәи°ғзі»еҲ—еҢ–гҖҒйҖҡз”ЁеҢ–гҖҒж ҮеҮҶеҢ–еҸ‘еұ•
3 {: I9 E/ L( L. v
ж°ҙдёӢж— дәәиҲӘиЎҢеҷЁејәи°ғе№іеҸ°зі»еҲ—еҢ–гҖҒиҪҪиҚ·йҖҡз”ЁеҢ–гҖҒиҪҜ件ж ҮеҮҶеҢ–еҸ‘еұ•гҖӮе№іеҸ°ж–№йқўйҮҮз”Ёзі»еҲ—еҢ–е»әи®ҫд»Ҙж”Ҝж’‘ж°ҙдёӢж— дәәдҪңжҲҳеҠӣйҮҸеҝ«йҖҹеҪўжҲҗпјҢд»ҘзҫҺеӣҪдёәдҫӢпјҢе·Іе»әз«Ӣе°ҸеһӢгҖҒдёӯеһӢгҖҒеӨ§еһӢгҖҒи¶…еӨ§еһӢж— дәәиҲӘиЎҢеҷЁеҸ‘еұ•еәҸеҲ—гҖӮиҪҪиҚ·ж–№йқўйҮҮз”ЁйӣҶжҲҗеҢ–зҡ„ж–№ејҸпјҢжҠҠдё“дёҡйўҶеҹҹе…ҲиҝӣжҠҖжңҜеҲ¶жҲҗжЁЎеқ—еҢ–дё“з”ЁиЈ…зҪ®дёҺзі»з»ҹжҺҘеҸЈпјҢйҖҡиҝҮиҪҪиҚ·жЁЎеқ—й…ҚзҪ®е®һзҺ°д»»еҠЎиғҪеҠӣзҡ„иҪ¬еҸҳпјҢе…¶дёӯзҫҺеӣҪж–°дёҖд»Јдёӯе°ҸеһӢж— дәәиҲӘиЎҢеҷЁеқҮд»Ҙе•Ҷз”ЁиҲӘиЎҢеҷЁдёәеҹәзЎҖе№іеҸ°з ”еҲ¶пјҢйҖҡиҝҮиҪҪиҚ·жЁЎеқ—зҡ„иҪ¬еҸҳе®һзҺ°д»»еҠЎиғҪеҠӣзҡ„иҪ¬еҸҳпјӣеҫ·еӣҪи’ӮжЈ®е…ӢиҷҸдјҜе…¬еҸёжҸҗеҮәеҸҜиҪ¬жҚўж°ҙдёӢжҜҚиҲ°йЎ№зӣ®пјҢйҮҮз”Ёй«ҳеәҰжЁЎеқ—еҢ–и®ҫи®ЎпјҢеҸҜй’ҲеҜ№еҗ„з§Қд»»еҠЎиҝӣиЎҢиҪҪиҚ·й…ҚзҪ®гҖӮиҪҜ件方йқўеҲ©з”ЁжҲҗзҶҹе•Ҷз”ЁжҠҖжңҜпјҢе»әз«ӢејҖж”ҫејҸж ҮеҮҶеҢ–ж— дәәиҲӘиЎҢеҷЁзі»з»ҹжһ¶жһ„пјҢе®һзҺ°е…¶жҠҖжңҜеҝ«йҖҹжӣҙж–°гҖӮ
& M6 H9 X" {: {' g v1 A е…ій”®жҠҖжңҜйҮҚзӮ№жҸҗеҚҮзҪ‘з»ңеҢ–гҖҒеҚҸеҗҢеҢ–е’ҢйӣҶзҫӨеҢ–иғҪеҠӣ
! u5 c% K. C# n/ x1 B- z# F еӨҡиҲӘиЎҢеҷЁз»„жҲҗдёҖдҪ“еҢ–дҫҰеҜҹгҖҒжҺўжөӢгҖҒжү“еҮ»зҪ‘з»ңпјҢеҚҸеҗҢдҪңжҲҳе’ҢдҪңдёҡпјҢжҳҜжҸҗй«ҳе…¶дҪңжҲҳиғҪеҠӣе’ҢдҪңдёҡж•ҲзҺҮзҡ„жңүж•ҲжүӢж®өпјҢд№ҹжҳҜж°ҙдёӢж— дәәиҲӘиЎҢеҷЁйҮҚиҰҒеҸ‘еұ•и¶ӢеҠҝпјҢиҖҢзҺ°йҳ¶ж®өжңүйҷҗзҡ„ж°ҙдёӢйҖҡдҝЎиғҪеҠӣгҖҒдҪҺж ҮеҮҶзҡ„иҮӘдё»жҺ§еҲ¶ж°ҙе№ігҖҒиғҪйҮҸеӯҳеӮЁжҠҖжңҜйҷҗеҲ¶гҖҒеҚ•дёҖзҡ„еёғж”ҫеӣһ收方ејҸзӯүд»ҚжҳҜеҲ¶зәҰж°ҙдёӢж— дәәиҲӘиЎҢеҷЁе®һзҺ°дҪңжҲҳиғҪеҠӣжҸҗеҚҮзҡ„йҮҚиҰҒеӣ зҙ гҖӮжңӘжқҘеҸҜйҖҡиҝҮеЈ°еӯҰгҖҒз”өзЈҒгҖҒе…үеӯҰзӯүеӨҡз§ҚйҖҡдҝЎж–№ејҸпјҢеўһејәж°ҙдёӢдёҺи·ЁеҹҹдҝЎжҒҜдј иҫ“иғҪеҠӣпјӣеҸҜйҮҮз”ЁеӨҡз§ҚжҺўжөӢиҜҶеҲ«ж–№ејҸзӣёз»“еҗҲзҡ„жЁЎејҸе®Ңе–„зҺҜеўғж„ҹзҹҘе’Ңзӣ®ж ҮиҜҶеҲ«иғҪеҠӣпјҢд»ҘжӣҙеҠ жҷәиғҪзҡ„дҝЎжҒҜеӨ„зҗҶж–№ејҸиҝӣиЎҢиҝҗеҠЁжҺ§еҲ¶дёҺ规еҲ’еҶізӯ–пјҢжҸҗеҚҮж— дәәиҲӘиЎҢеҷЁиҮӘдё»еҢ–зЁӢеәҰпјӣеҸҜйҖҡиҝҮеҸ‘еұ•й«ҳеҜҶеәҰиғҪйҮҸжәҗгҖҒйҮҮз”Ёй«ҳзІҫеәҰиҲӘиЎҢеҷЁдёәе…¶д»–иҲӘиЎҢеҷЁжҸҗдҫӣеҜјиҲӘдҝЎжҒҜзҡ„ж–№ејҸжҸҗеҚҮж°ҙдёӢй•ҝиҲӘж—¶иҝңи·қзҰ»жҠөиҝ‘дҪңжҲҳиғҪеҠӣпјӣжҺўзҙўд»ҘеӨ§еһӢиҲӘиЎҢеҷЁйғЁзҪІе°ҸеһӢж— дәәзі»з»ҹе’Ңз ”з©¶дёҚеӣһ收иҮӘжҜҒжҖ§ж— дәәзі»з»ҹжҰӮеҝөжҸҗеҚҮеёғж”ҫеӣһ收ж•ҲиғҪпјҢд»Ҙе®һзҺ°ж— дәәзі»з»ҹдҪңжҲҳиғҪеҠӣзҡ„зӘҒз ҙгҖӮ
9 R) j, [) G! |( d2 ~- f7 y/ ], z
жқҘжәҗпјҡгҖҠиҲ°иҲ№з§‘еӯҰжҠҖжңҜгҖӢпјҲ2020е№ҙ第12жңҹпјү
! l& B6 X6 A, A& v$ B* ^. f4 Z. x иҪ¬иҮӘпјҡ жәӘжөҒд№Ӣжө·жҙӢдәәз”ҹ
+ H" s" h& y1 A и“қжө·й•ҝйқ’зі»еҲ—иҮӘеӘ’дҪ“
9 |3 ^9 c' g$ W1 | вҖҚ
. r7 o, u" N% l6 g, X' x
. H) V. q m2 d/ V+ h


