高速发展的现代海洋监测设备能够提供海洋动力环境、生态环境及战场环境等综合信息,是海洋科学研究、资源开发、气象预报及海上军事行动的基础。《国家中长期科学和技术发展规划(2021—2035)》中对中国海洋科技领域未来发展进行了规划和预测,对海洋领域监测系统的建设进行了前瞻布局。
* R" _& K! r6 y0 {" w8 t* L: P8 N+ x1 [& ^# Q( g: ]$ k+ B
: g/ x, z( q% ?: K) C: h 如今,中国海洋监测系统已初步形成以卫星、反潜直升机、侦察机、岸基观测站、调查船、各类浮标、水面无人艇、水下潜航器、波浪滑翔机、水下滑翔机、水下机器人、各类潜标和海底观测网等组成的“天-空-陆-海-潜”五维立体监测网络。潜浮标作为整个海洋监测系统内的重要一环,是海洋观测站、调查船和调查飞机在空间和时间上的延伸扩展,是离岸监测的重要手段。潜标系泊于海面以下,可通过释放装备进行回收,具有连续工作时间长、隐蔽性好的特点,能够获取海洋水下剖面资料和采集水下各类信号,海洋学家将其誉为“海洋上的地球同步卫星”。中国是海洋大国,但仍不是海洋强国。
6 Y. x6 K/ D" p) X( u. j
9 A4 Z3 c4 J* }6 e3 g+ I) v) @8 }% v' K3 x/ B
■ 海洋环境观测浮标 ' }: [" a# ~" I
) W8 Y9 C, ~7 G: G7 y& H9 E+ _; Z! Q- V8 N4 i' E- q0 c
发展潜浮标技术对水文气象测量、海洋工程建设及国防安全均具有重要意义。《中国至2050年海洋科技发展线路图》中将发展海底探测装备和技术列为重点突破技术。潜浮标技术的发展一方面要创新思维,坚持自主创新的道路,另一方面又要借鉴世界先进技术。文章对潜浮标技术发展脉络、特点和应用进行了梳理,在总结前人工作经验的基础上,为未来潜浮标的发展提供一些新的思路。7 V; o+ o* m3 ?9 o
! y, y, C- _ u: U! f! x- n0 ~
5 R, R8 }2 N9 V1 N& U% S5 j1 K
$ j w* j* v) g) U5 a6 R! v
一
9 \" r: m* M) v5 }- T潜浮标技术发展
3 A7 ]! k; {+ @4 h1
6 [3 l; A7 `, l/ j5 [, Z国外情况
5 D4 S7 g Z; D" }1 _" B: c& `7 Q: E+ s7 K+ |6 G A1 e
5 H8 t, s- J2 W! e F Q (1) 浮标技术
' Q4 C0 [; x( U" F# r5 _2 B% v) \ x* z
& A- O9 q4 h* n: e4 ], W; r! X
20世纪40年代末,浮标技术首次得到应用,最初研制的浮标功能较单一且测量精度高,随后前苏联、加拿大、法国和日本等国家也相继加入浮标研究行列;60年代初,美国海洋调查机构正式引入浮标系统,在主要海域布设浮标网络,且布放浮标的数目逐年递增;70年代时,日本也开展利用浮标系统调查海洋黑潮的活动,随之,各国开始研制多功能观测型海洋浮标系统;到80年代中期,浮标技术发展成熟,广泛应用于海洋调查、科学研究、军事活动及海洋开发等方面。如今,美国国家资料浮标中心共建成106个锚系资料浮标和1100多个合作监测站,可实时通过浮标和站点收集、传送观测数据。8 J; ]/ J# N" D( H
3 @* d p4 |" ]) D+ ^
3 j; i4 Y9 i- L (2) 潜标技术
4 Q; D8 Y" ~6 f7 O4 L1 u# b1 U
$ k, P0 N, o% H6 ]; C+ ~; l1 c7 z& j) d N' g$ y# x
20世纪50年代初,潜标技术首先在美国得到发展,到70年代时,美军已利用潜标系统掌握大量海洋剖面信息并将潜标系统应用到区域性警戒系统中,其研制的被动声纳N/SSQ-53DIFAR潜标系统,能够对目标源辐射噪声进行检测,进而定位目标方位。80年初期,潜标系统已发展成熟,其与锚泊浮标相结合形成的绷紧式锚泊浮标系统在海洋环境监测中起了很大作用。2000年,美国伍兹霍尔海洋研究所开始研制实时传输潜标,通过感应耦合技术,将测量数据传输到水面浮标,然后通过卫星发射到岸站或由水下声通讯中转下载。+ |' ^ [7 a) g# b% z
( \0 z W& M# U S1 \
+ y% P9 }4 q# b5 q! D) Q2
7 r; n1 ^/ g" A4 j国内情况
0 A( A8 m; I2 Q+ z4 B0 i! p1 q; a$ `# Q! r. f
- D7 v& `8 i: b
. U+ U- y; H4 q% Z6 V0 ~: l a, j
+ N/ U! Z( ?6 B Q/ s8 f0 D; e
0 K: Z" }* |+ b T" L/ X (1)浮标技术# h# d) g) H, Y& p& d( J
/ z; [) C: E. t9 z, ]/ x3 G
1 N$ [4 S* K- e* ?2 \4 F! O 中国对于浮标的研发始于20世纪60年代中期,经过近50a的不断发展,目前中国已经是浮标系统监测的大国。2002年,中国正式加入国际Argo组织,成立了中国Argo实时资料处理中心,负责中国海域内Argo浮标的布放回收、实时资料接收和处理。2007—2010年,中国科学院海洋研究所在黄海顺利布放7套海洋浮标系统,完成黄海海洋观测研究站的建设。2010—2013年,国家海洋局南海勘察中心在南海区域成功布放了HX1和HX2号海啸浮标,填补了中国海啸浮标监测领域的空白。2012年国家海洋局第一海洋研究所在安达曼海成功布放中国自主集成研发的首套深海浮标“白龙浮标”。2019年,国家海洋技术中心首次在南大洋布放了实时综合观测浮标,观测到该海域西风带常年处于大浪以上的海况。$ |% g! T# E0 s7 C( l6 F/ h b) F
7 e& H) D# m; b& c0 Y' T5 N! f( X- s
目前,中国已成功研制了不同尺寸、不同材料、多种用途、多种安装形式的系列浮标,研制的系列浮标已应用于中国从南至北,从近海到远海的浮标监测网的建设,并逐步拓展到极地和大洋中。至今,中国已初步建立了包含约130个浮标的近海浮标观测网。 [' {% a7 p" r0 f' N* U7 t
! {1 R" n0 X+ M( k; M7 X, S+ O/ U- D/ |9 ^- n
(2)潜标技术
0 D: ~ Q: {/ P$ B4 I# a$ [5 I! a8 _) n: [; ~
% k h; ?$ v8 z* g9 w 中国从20世纪70年代开始研究潜标技术,到80年代后期,国内相关单位研制出中国第1代自容潜标,并在南海成功布放使用。近年来,中国船舶重工710研究所、国家海洋局、国家海洋技术中心、海洋一所和中科院海洋所等单位开展了海洋环境监测潜标、海洋声学探测潜标、实时传输潜标等研制工作。2015年,中国科学院海洋研究所在西太平洋海域规模化地应用自研浮子式实时/准实时潜标观测系统,并在2019年实现了深海6000m实时数据传输。2019—2021年,中国电子科技集团公司第三研究所研制了多款潜浮标设备,并完成海上试验。0 k( [) ^1 ~) L8 {. I
- ]) C7 n% N2 t* A2 L
; P) x. ]1 {; w; N& z; A) ] “十三五”期间,中国对潜标系统的研究投入不断加大,并成功研制多类型潜标系统,被广泛应用于海洋研究、开发和军事。近年来,中国海洋大学研制的深水定时卫星通信潜标系统在西太平洋定点海域完成系列试验和布放。
) o7 ?1 r+ h2 R. R. |
" L H8 c- b6 B& x6 N) H4 B* ]- a9 T' G9 p9 {* \1 Y
8 Y' l; B# b3 e, X; G) P" g1 x
二2 u) |% G8 m x. j. s) u) W, f2 Z% U
潜浮标系统特点与应用
1 ~" ^" T2 Q" {7 S. b13 N% C0 I0 q& e7 G, m( `7 [- ~- X
潜浮标系统特点
. f) N8 x: X! Y" ~- ]8 g5 ^: h+ O4 q) O6 c1 T4 o& z5 k1 ]
# L7 e# q7 @5 ?9 H; C, F5 ^
; Y {8 d- i* O9 ?8 v 浮标和潜标在组成、系泊方式、适用水深和应用模式上各有不同,浮标通过漂流或锚系的方式工作,具有实时通信能力强、供电充足的优势,但锚系浮标存在布收复杂、易暴露的劣势;潜标通过锚系或坐底的方式工作,具有长期隐蔽、布设方便、不易遭到破坏的优势,但存在实时通信能力弱、供电有限、搭载仪器少的劣势。4 c0 s6 C( J* r* j! N/ n; p1 S
" { ^& u7 C' a0 u" E( H7 ?2 W3 R1 A+ M; i5 M
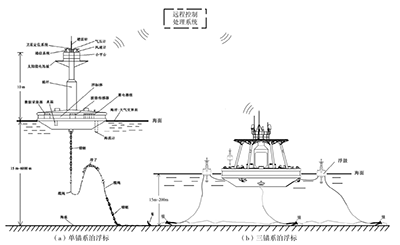
浮标主要分为漂流浮标和锚系浮标两大类。漂流浮标根据工作深度的不同分为表层漂流浮标和次表层漂流浮标;锚系浮标根据系泊方式的不同分为单锚系泊浮标和三锚系泊浮标。表层漂流浮标一般由水帆、浮球和连接缆绳组成,布放于海面及海面下固定深度。次表层漂流浮标的浮体位于水下1000~2000m的某一深度,测量相应深度的海流参数,其应用最广的代表为Argo浮标。锚系浮标组成较漂流浮标复杂,锚系浮标组成示意图如图1所示。2 c3 ?; @: T& Q( Z/ l6 \
9 E; ~3 F& R" ?& b4 z4 J
X! W5 H! P! K# v 图1 锚系浮标系统组成示意图 ! K5 S$ {- f3 A: P2 }
; }7 p; `; {- J7 i
! e6 h: }, P7 v/ U X
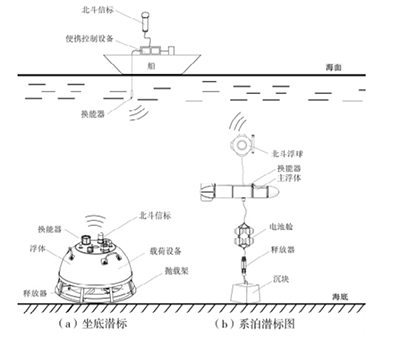
潜标一般由水下装置和水上控制装置共同组成。根据工作深度不同,分为浅海潜标和深海潜标,浅海潜标适用于水下200m水深范围内,深海潜标可覆盖全海深。根据锚泊方式不同,潜标又分为坐底潜标和锚系潜标。潜标系统组成示意图如图2所示。
6 M! @+ l$ q/ l 图2 潜标系统组成示意图 : L! i1 V3 H6 M5 p* M# I5 V+ B
2 `. |8 L8 f) h' ^5 x% }8 K
% f9 K0 b" k5 R" y" e 坐底潜标系统(图2a)由水下装置(主要包括浮体、载荷设备、释放器、换能器、北斗信标、抛载架等)和水上控制装置(主要包括便携控制设备、换能器、北斗信标等)组成。锚系潜标系统(图2b)的组成与坐底潜标的组成类似,结构形式有所不同。锚系潜标由水下装置(主要包括主浮体、换能器、电池舱、释放器、沉块、北斗浮球等)和水上控制装置(主要包括便携控制设备、换能器、北斗信标等)组成。$ z, J+ q) y" o
$ {2 S' S/ s3 @/ b+ V* G! l& W1 |
! a J$ F. m5 k: c1 j2
" t C, F+ J1 @! x+ d2 B潜浮标系统的应用; R3 Q/ h: k8 ]! p! h% j" R
' ]& \5 B* {+ `8 q, }" Y
8 B! w0 L2 W" O5 M
" E* P6 a" D) u7 R2 Y9 Z' f. l( s (1)潜浮标系统在民用领域中的应用
( t1 U4 m' x9 Y9 c+ e1 P( W
7 O* k, k3 ?- @, {- B* q1 t, o6 E0 B3 {% P+ ]
潜浮标系统在民用领域中的应用主要集中在海洋测量领域,近年来逐渐由全功能向专用型和体系化建设发展。文章重点总结了潜浮标系统在专用型和海洋观测体系建设中的应用。
. K9 [: ]- M' N1 v& @
7 ?# O' q H" m$ a1 E s, K, Q) j' @6 J& j7 \5 O7 O# k- c- }- v7 j
①水文气象浮标
1 L5 @/ v6 x$ Y" z
. j9 o5 C* |0 A4 C% H3 ^! \$ _; V
水文气象浮标是世界上应用最早、使用最多的一类浮标。水文气象浮标能够全天候、不间断、自动采集和上传数据。2019年,王柏林等设计出基于STM32的海洋气象浮标采集系统,可实时测量近海水域水文资料并通过无线传输的方式进行数据回传。' K g4 Q- U3 K# ~/ ]5 [0 M
7 ?5 T# X1 h8 x% ~% x, n2 @. [/ L
" v$ z' v6 h1 Z$ g ②水质浮标
" c1 q! [: o/ w: Z6 F5 O9 V9 N& @5 c
( C) K+ c1 W% ~6 ^5 W- k5 M" y9 S 水质浮标能连续、实时检测海洋环境要素的变化,对研究近岸海域水质变化趋势有重要意义。水质浮标通常由浮标体、水体水质监测传感器、数据采集系统、浮标运行控制系统、供电系统以及远程数据接收终端组成。水质浮标具有自适应强、适用范围广、监测时间长和节省人力物力的优点,在广阔的海域上,水质浮标配合相应手机和处理单元,可以做到实时监测目标水域]。 W: ^* J& [8 D% m4 c; S! T. e
/ P' q; ^. Q" L1 f0 O( }' F9 k
2 H% x7 S; a: B$ R# G2 V ③导航浮标
3 J5 q& c; }; a8 S* u+ K
4 I: V' X v* S m# [
: x* m* a$ o- N' g- S 导航浮标是一种漂浮在海上的浮标终端,采用太阳能板对其进行供电,可采集多种海洋物理数据,如温度、盐度、pH、声纳等。浮标终端和船载终端均安装卫星通信卡,通过通信卫星完成两者之间的数据交换。! J# z8 o+ d+ R; K% N" Y# @
1 V i# i; f" d
2 [" q$ L x; ^% e1 g N; g 天津海事局主持研发了一种利用北斗传输的海洋导航浮标,布设在天津港复式航道上,既可以作为导航浮标,又能作为海洋观测的载体浮标,可利用北斗导航系统实现数据传输。
3 C4 ]: o4 s4 S# F$ f
! E7 [! a2 r6 E0 H( g% X% L+ f- L" [0 ] e" q
④波浪浮标; W$ Z/ S: B, H! A$ f, \- ~
; S/ A% N, }0 }
8 C* g0 w: F b8 O8 [
波浪浮标是一种监测近海波高、波向和表层水温的小型遥测系统,主要由浮体、锚系和岸站3部分组成。山东省科学院海洋仪器仪表研究所近年来研制了一款SBF3-2型波浪浮标,采用CDMA/GPRS方式传输,可通过锂电池供电。目前已有30多套该型号波浪浮标分布在中国沿海和内陆湖泊,为国家海洋环境监测事业发挥了重要作用。
; s8 j# M" q$ t, {! i! x. x4 d3 {
9 E: o, X1 Z8 T' h7 S# M2 F
+ L) M2 Q; ]) U% y ⑤海啸浮标
/ R' ~' t1 Y9 B% i; N; O. |6 c1 i6 X" Y. ^; U- Z, b) ?0 h
+ Z, {; h5 P8 g9 q0 A 海啸浮标的本质是“海底压强计”,一般安装在海底,用于记录海啸数据并做海啸预警。海啸浮标系统由1个水下单元和1个同步锚泊在水面的浮标组成。安装在水下单元的声通讯传感器将数据从水下单元传输到水面浮标,水面浮标将这些数据通过卫星(海事卫星或北斗卫星)实时传输到陆地接收站的数据处理中心以供提前预警。
( W3 t) J7 C" T! S4 `# I7 M+ E7 L! {" e! o Z( }. s* T! i8 [
* ~4 T* \: \" [2 T ⑥海冰浮标" p* ` c* l5 T1 H |
# C6 j/ h) O5 d# O5 J3 z& F9 ]% L- ~( c4 t# w: D
海冰浮标可实时监测冬季结冰或寒区海域的海洋信息。通常该类浮标包括:抗冰标体、系泊系统、太阳能风能互补发电系统、海洋观测传感器系统和观测数据远程实时传输系统等。例如,中国自主研发的无人值守海冰浮标观测系统“无人冰站”,由4部分组成,包括气象塔、冰上主浮标、副浮标以及拖曳式海洋剖面观测仪。该系统不仅可以探测海(冰)气交换界面的环境参数,还可探测水下环境剖面参数,对于研究海冰生成与融化过程的环境条件、探测极区的气象与水文参数、追踪浮冰漂流方向和路径,以及对洋流的研究均有重要科研价值。
! @' a6 I! u! d+ `/ S3 t- Q, |6 ?3 c2 v8 D, p
. {5 t& F! J8 |: h1 w5 C! U ⑦实时传输潜标. X4 B, O, c* c0 p
2 l4 F6 z% C, u+ g! h! }1 i( E/ R: ^# ?* b9 B
实时传输潜标是集多学科的海洋调查测量高新技术设备,能长期、隐蔽地对海洋动力参数和环境要素进行实时立体综合监测,近年来,实时传输潜标在海洋调查研究领域得到广泛应用。该潜标系统由主浮体子系统、水面卫星通信浮标子系统、锚泊系留回收子系统和远程控制处理中心子系统组成,其中主浮体上可搭载ADCP(多普勒剖面海流观测仪)、海流计、温度链等海洋测量设备,用于观测海流剖面、水下温度剖面和水下定点温度、盐度、深度、流速等多种深海流体动力参数。. ~- e" u' ]# g" b3 v0 o
4 ^- x. N( [* d, `$ m
7 _3 g5 h7 J" g
⑧水下热通量与混合仪潜标
$ ]) z' L9 a, ?. R$ t3 q5 V+ L% p5 U) w* O
9 W9 d% i- I& R# \: I2 }2 v4 Z 水下热通量与混合仪潜标由水下热通量与混合观测仪及测量背景流场、温度场的仪器组成。此系统能够同时长期观测水下热通量及湍流混合两个湍流参数,多层次揭示水下湍流特征。该系统突破传统微结构剖面观测仪的局限,可直接观测不同海洋条件下,包括内孤立波、台风等过境时海洋引起的强混合及其对热量的垂向输送的湍流物理参数,为揭示混合对暖池区海洋上下层环流的物质交换的动力机制和预测海洋灾害提供数据支撑。
; v2 N- U9 p T: {& x% w7 _* z" L& r
2 c; h4 u$ D" L. A" l6 w) G4 ~0 |. t. |6 S1 N
⑨海洋观测体系建设
& ?' z8 p. y P5 M& c& \0 R
j7 p9 d; q: `3 Q6 v6 ^0 _8 U2 `+ F4 F7 F/ j8 [0 R; f1 B2 j
“透明海洋”被纳入联合国“海洋科学与可持续发展十年计划(2021-2030)”的6大路线图,近年来,中国致力于“透明海洋”体系建设,基于中国当前在深远海立体观测系统初期建设的基础,以成熟浮潜标等固定平台为骨架,科考船为补充,以新型海洋观测技术和新型卫星为突破口,布局建设了包括天基观测网、全球海气界面观测网、深远海水体观测网和深远海海底观测网在内的“透明海洋”立体观测网。2 a& w3 ?! g* N% B0 z5 l: I0 Y3 M
L" ^ C1 ^' M9 Z' s
( P+ U7 H: o: r) e! \) w (2)潜浮标系统在军事领域中的应用
: B n+ l9 ~7 V2 d, D
" Z& ]7 W, T' h: z: h U: H$ N/ c3 a' y
9 V" J6 z/ A W- U 海洋资源的保护和主权的维护,都需要建设一支强大的海军。现代海军的建设已经朝着立体化的方向发展,利用卫星与潜浮标系统组网开展了集“通信、侦察、打击”一体化的防御系统建设。文章重点总结了潜浮标系统在军事领域具有重要作用的几类应用模式。% d) k* D/ {* G6 l0 h: u. r
$ Y% X9 j) ~9 q5 o6 z8 F! b& O
0 r5 S$ @1 Z" o5 P0 { ①搜潜浮标4 t6 B, l- W) o1 l! ^
) m! t9 b# l7 O/ r( s! W$ s, F: o" b8 N' y! r9 v1 _
捜潜浮标以固定翼飞机、直升机、无人机为投放平台,用于对水下潜艇目标搜索、定位,具有机动灵活、搜索效能高的优势。搜潜浮标一般由反潜直升机从空中投放,浮标悬浮于预报有潜艇出没的海区。对水下潜艇进行有效搜索时,通常需投放多枚浮标组成一定阵列。常见的阵式有直线阵、三角阵、圆形阵、扇形阵和方形阵等,如图3所示。当布阵结束后,反潜直升机会在布设的浮标阵上空巡逻飞行,以保证能够监听到所有浮标发送的无线信号。 y# }8 l" T3 V/ T8 @
3 ?! o G: ]7 B" A
+ z/ p f, y5 J& g% B. y4 z 图3 常见的浮标反潜阵式
/ C/ b) S7 U6 }# \4 O' C ②水雷浮标
# G3 N1 w, o2 V, Z7 W' I
5 d* v/ t1 }( o' `7 a0 C- y5 R% `& ^1 l: s( S% M
水雷浮标由声纳浮标与水雷组成,两者通过电缆相连接。水雷为锚雷或沉底雷,体内装有炸药和声、磁传感器,可通过飞机完成水雷浮标投放。投放完成后,连接电缆释放,浮标会漂浮在海面上,水雷则会下沉到设定的深度或者海底。当需要工作时,由控制中心向浮标发出无线电控制信号,而后通过有线电缆将信号传输给水雷,使水雷受控动作,完成攻击任务。同样,也可以利用潜标与水雷组成雷阵,该雷阵具备了实时传输潜标的技术优势,增强了水雷的灵活性。5 ]0 [% W* p0 s! k4 p# T; C% W6 u
+ t# @5 a! E" P: }- ?" Q5 i; {1 c
+ E( D1 D9 _4 h
③潜艇通信浮标. m) R) Y" c4 c9 U% A- o
4 }/ q' O) Q1 i: i. d
) n- w; W) S( \; |
潜艇凭借自身特有的隐蔽作战模式长期称霸水下战场,隐蔽性是其威慑力的关键所在,但这也导致潜艇的信息支援保障方面存在被动性、非实时性和有限性,不利于潜艇水下行动的自主性和应对突发情况。
- v' X7 C' T8 T Z' r: ?
8 C _' r+ X. Y$ {. S+ K4 Z U+ }+ u+ x1 t9 q3 d
基于水声和卫星通信的水声通信浮标能在很大程度上弥补潜艇观察能力弱的缺陷,从而保证潜艇的隐蔽性。在不影响潜艇机动性的条件下,水声通信浮标能接收发送潜艇的有关信息,并接收来自岸基指挥所的指令,有效地解决潜艇与岸指、海指及其他兵力之间在复杂恶劣的战场环境中进行信息沟通的实际问题,开辟多兵种协同作战等新的作战模式。1 U2 @. f4 x4 R5 [# b( W) o8 F
6 O0 B. B" z) m) m/ J& L, T4 i+ W; c- J7 k
④集“通信、侦察、打击”一体化的潜浮标防御系统建设
( ^6 \8 f1 N# q# j& T6 Y' A/ W3 K0 k4 |0 z' X Z6 g1 e4 ]
0 D3 H3 u4 X. Y$ j* n5 r4 S$ X$ U 针对近年来境外势力对中国近海港口、岸基设施构成的威胁问题,可通过建设集“通信、侦察、打击”一体化的潜浮标防御系统进行应对。系统采用潜浮标数据融合技术提升水下目标的检测、识别和分类能力,稳定的水下通信实现了指令和信息的可靠传输,安装于潜浮标上的多类传感器可完成相关海域水文信息的采集。3 s6 H: f6 d% L P$ y9 ?6 K) R
& r* r/ T! _# U* x
* h3 U- \) d) d6 F! W 防御系统由水面浮标、水下潜标、水下反制设备和远程控制处理中心4部分组成。水面浮标对水下信息进行实时采集并将预处理数据汇总到远程控制处理中心,同时完成水下信息指令的传输;远程控制处理中心完成对水下信息的解译并下发控制和攻击指令;水下攻击设备时刻待命,待接收水面浮标转发的攻击指令和目标方位信息后执行攻击任务。系统也可以解决潜艇隐蔽状态下的位置校准和信息交互。
8 E6 i9 l0 }) ^" i4 a6 A5 }4 u: h: B
4 V) f/ D5 E. |* o) N$ d
* D) {: ~9 b+ q& Q% y! R5 M9 m/ h
三& Q# o; j- O4 [( a1 ^7 j
潜浮标技术未来发展展望
! u& ~) O9 J% D3 A2 M: _2 V
& o" ?" f4 E3 r: b+ t9 R, Z4 ?, g* s6 ~5 H& @& O' d6 ^
国家在“十四五”规划中,明确指出要推进海洋生态保护、海洋经济发展和海洋权益维护,提出了加快建设海洋强国的目标。这对海洋潜浮标技术的发展提出了新要求、新标准和新问题,综合分析潜浮标技术的发展脉络及未来民用领域和海上战场对于潜浮标的需要,未来潜浮标技术的发展考虑从以下4个方面开展:2 r% a v7 t+ g4 p
! I0 J0 z# r7 u+ v5 Y" e
6 E5 K1 G) i" L) b$ m( G ①深远海潜浮标技术。中国应加快设计研发相关的专用深远海浮标、降低浮标的布放、回收成本;针对深远海的锚泊技术、系留技术及潜浮标系统的可靠性等关键技术开展科技攻关,为中国“十四五”期间深海探测的实施提供重要技术支撑。& W+ h. C0 h2 o) F& L& Q
* O; e6 v" n8 {0 G t# g) l; `
) ?4 c3 r5 F" f; G9 l4 @
②潜浮标实时通信技术。中国应加快建设潜浮标设备与北斗卫星组网,建设全球的海洋监测网络,解决远海浮标技术的通信问题;同时应加快对实时传输潜标、水下通信及水上浮标通信等技术的研究,建设可靠的实时传输潜标通信网络。为中国海洋环境资料监测、海洋权益的维护和军事应用提供信息保障。0 L# r( z7 o9 y$ s4 n$ _
9 j1 |! B9 ^7 ^! s: D' V: t% }; x, W7 F3 P
③海洋水下剖面浮标技术。海洋水下剖面数据对海洋科学、海洋维权和海洋调查都具有重要意义,是目前国际上的热点研究问题之一。中国应当在当前的成果上加速研究和攻关水下剖面浮标所需的锚定技术、剖面观测技术、剖面数据的可靠传输以及长期可靠性等技术,为中国水下剖面的长期观测提供技术支持。
O2 I* i' Q9 }+ a* E. ]* ]
- B6 [/ g+ a/ k7 p- U9 a0 R$ Y8 _: l7 G+ @6 o+ V5 e. X
④三维立体监测技术。中国应加快建设海上三维立体监测网络,将近远海观测平台、各类潜标、浮标、岸基、卫星监测系统相结合,对定点海域进行多层、立体、多角度、全方位和全天候的监测,为海洋环境监测和军事防御提供三维全方位实时数据。
) k2 H* d& a& |/ _5 x) z w$ ]. G" J
/ A- C* a' a) x; s! x @
( [8 I* d& O; D! a# X1 t7 P; c) r% a+ F% C4 w4 ^' p
四; G' N y b% v& [
结束语& I8 [1 ?& f8 x. p
潜浮标作为关键的海上监测设备,具有很大的使用价值。在信息化高速发展的今天,对于海洋环境信息的搜集极为重要,潜浮标技术的研究发展和普遍应用,将提高中国海洋环境预报的水平,增强海洋战场环境的透明度,对海洋生态环境及国防安全均具有极其重要的意义。+ Q# y1 r$ s3 O8 B* @' T
6 C3 @ V, [) d2 O/ d
8 q3 i' [5 a) [& [$ y; U: d
( `! f! b( ]2 p8 k9 X; Z
该文章来源互联网,如有侵权请联系删除- }8 e7 |3 p' W# \; o. h
查看原文:www.52ocean.cn |



 - s$ k: B( i& A- a' ~7 U& H- T
- s$ k: B( i& A- a' ~7 U& H- T
