|
+ |1 f* z2 I5 t6 |& {1 A. D 海洋占地球总面积约71%,是人类生存与实现可持续发展的重要空间。而海洋科学研究、海洋资源开发、海洋工程建设及海防安全等活动,通常需要准确获取所关注区域内的海底地形地貌信息,以此来作为底层数据支撑。
' ` O3 @7 G0 m6 V* b, s 声学方法是现代海底地形测量的基本方法,早在19世纪人类就已经认识到通过测定海底反射声波的传播时间可得到水深值,但直到20世纪20年代,在电子传感器技术高速发展的基础上,声学测量才取代了传统的铅垂测深法。
; x" G5 B7 l2 R3 k 随着水声学技术、传感器技术、计算机技术等快速发展,近半世纪来,各种声学海底地形探测设备发展迅速,从早期的单波束测深系统发展到集成度更高的多波束测深系统,为我们揭示了小到数米大到几千米的海底地貌形态。 0 X. u, O2 O0 a' }: ~$ F R* A
其中最具代表性的产品就是多波束测深系统,已经被广泛应用于海洋工程测量、海底资源与环境调查以及海底目标勘测等国防和国民经济建设领域。目前,浅水多波束地形测量主要集中在大陆架浅水区、海岸带地区以及内河河道、湖泊等地区,主要应用于海底管线调查、油田井场调查、滩涂演变分析、航道和锚地工程建设及水利工程建设等项目中。
! C3 P( A) A3 _4 A0 l# G5 [ 一、多波束测深系统简介
: P+ {" t8 O9 i$ l) K" u 最初对多波束测深技术的研究可追溯至上世纪60年代美国海军的军事科研项目,世界上首台多波束测深声呐是在回声探测仪的基础上发展起来的,诞生于上世纪70年代。多波束测深技术将以前的点、线探测扩展到面探测,并进一步扩展到三维立体探测,也称之为微地貌测量,从而大大提升了海底地形探测的效率、质量和精细度。
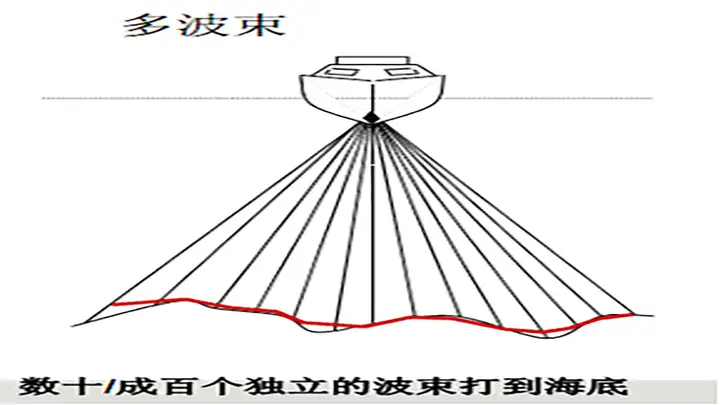
! ^ I7 G3 e' M2 l, u2 I4 u 上世纪80年代,国际上条带多波束技术已趋近成熟,该时期分离波束相位差的高精度估计方法和位偏离处理的边缘波束处理等技术的问世,突破了传统技术的瓶颈,促进了多波束大面积扫测水底的可能,见图1。 ! `7 @, A. o- ]- k
图1 多波束条带测深系统原理示意图经过近半个世纪的发展,多波束测深技术取得极大进展,其研发和应用都已达到很高的水准。目前世界较先进的主流多波束测深声呐产品主要包括挪威Kongsberg公司的EM系列、德国L3 ELAC公司的SeaBeam系列、丹麦Reson公司的Seabat系列、美国R2Sonic公司的Sonic系列以及德国ATLAS公司的Fansweep系列和Hydrosweep系列等。
8 d! p) Z" L. j( _0 G 然而,多波束系统出厂时只能算是“半成品”,其换能器、定位、定姿装置、操控单元只有和载具完成安装后,才能算是一个完整的系统。波束(Beam)是通过多震源以不同位置和时间序列发射声波(Sounding),利用相位叠加原理形成的,为了精确控制波束指向性,多波束系统需要实时测量换能器附近的水体声速;同时为了使波束稳定地指向海底,减弱船体的晃动对波束的影响,形成均匀整齐的脚印(Footpoint),实现“稳定测量”,需要实时监测并记录船体的横摇(roll)、纵摇(pitch)、船体起伏(heave),以及航向(heading),并调整不同位置震源的发射时间;由于入射角越大,在声速界面处声波的折射越明显,所以在作业过程中需要经常量测水体声速来修正其水深数据。
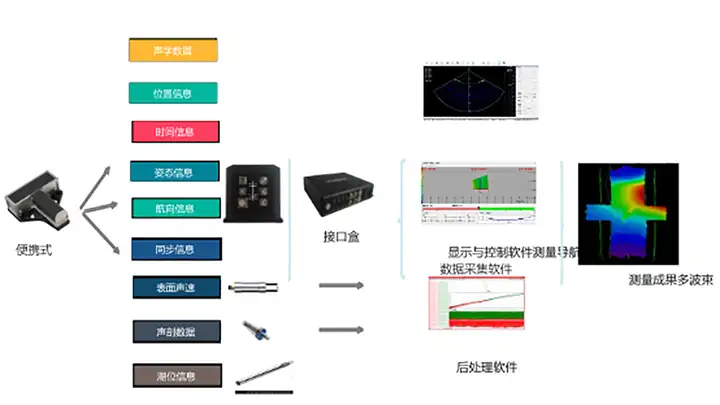
- S8 W E/ q1 z 多波束的系统配置为多波束换能器,工控机,定位系统(GPS),定向系统(罗经),姿态传感器(三轴MRU),表面声速计(SVS),声速剖面仪(SVP),并需要实时验潮,多波束系统组成见图2。多波束作业模式同为走航式测量,不同的是在有效解决了声速和运动改正的问题后,可更高效率、全覆盖的进行水底地形精细格网化测量。 , T ^/ x( Z; z; T- p* Q% s
图2 多波束条带测深系统主要组成由此可见多波束条带测深系统所记录的物理量是非常多的,包括:换能器安装姿态校准数据、系统延时、定位导航信息、声源处水体声速、水深剖面声速、信号往返时间、回波信号相位,以及船体的三向运动等,把所有这些值全部输入工控机,才能获得正确的水深数据。 5 r/ y; c& ?; f8 }
k: {: J. U" F+ ~( A5 [7 N
( q( I6 y4 E: d- U2 O
% x" A' a7 E4 W8 Z
/ t3 ] N- `* w' \1 F |