海洋渔业正从传统的海洋捕捞向深远海养殖方向发展。据联合国粮农组织(FAO)2020年统计,全球捕捞产量自 21 世纪以来基本稳定,而水产养殖产量逐年攀升,预计在 2030年前后将超过捕捞产量。随着近海自然渔业资源的减少和环境保护压力的增加,未来水产品增量将更加依赖深远海养殖来实现。0 h7 F o J: b/ j- s# M! O8 G
我国《全国海洋经济发展“十三 五”规划》明确提出全面提升远洋渔业资源开发能力,推动建设深水网箱养殖产业带,大力发展深水网箱养殖,促进海洋渔业产业调整结构、转变渔业经济增长方式。发展深远海养殖需要先进的养殖装备作为支撑。基于养殖网箱实施自动化、智能化养殖,是提升养殖规模和效益、降低人员工作强度和养殖风险的重要手段。对养殖海域环境实施远程实时监测是养殖自动化、智能化的关键环节。
) e4 l8 o4 k8 K* j. q( ~8 c面向深远海网箱养殖需求,基于高精度温盐深测量仪、无线数据传输网络、监测信息实时处理与集成等关键技术,研制与深远海大型智能化养殖网箱配套的海洋环境监测系统,能够为深远海养殖提供技术与装备支撑, 推动海洋渔业及相关产业发展。. ]0 K) q! j! a) |6 W$ o$ Z* b
1 、研究现状
) K! ^% J- e* Z6 J5 G \自20世纪60年代以来,深水养殖产业发展迅速,深远海养殖网箱等高端渔业装备蓬勃发展,代表性产品包括世界首座深海半潜式智能网箱 “Ocean Farm 1”(图 1)、目前容量最大的网箱结构养殖工船“HAVFARM 1”(图 2)等。目前, 深水网箱核心技术被挪威、日本、加拿大、俄罗斯等国所垄断。
, }- ?/ m/ W' R9 x6 l我国网箱养殖已有一定规模,但主要分布在内湾和近海,养殖密度高,水体质量差。我国深水网箱等养殖装备起步较晚,核心装备主要依靠进口,本土化配套能力不足,限制了我国养殖 装备的长远发展。- C' a- x. ~4 G# D& P0 G& C
1 z. O- \ I0 `8 M8 j* O( q1 I
7 ?( f6 Z& P; N( U+ ?图 1 挪威“Ocean Farm 1”深海养殖网箱 ( w* b* L" o* I! R4 M' Y% D! D
# w* N( |4 e5 y! h. \
图 2 “HAVFARM 1”深海养殖工船
8 ?( P, h6 r- R4 \9 G! b/ o在网箱养殖监控技术方面,主要是结合传感器 和有线/无线通信技术获取海洋环境、生物状态、 养殖设施的相关信息,实现远程监测。这些方案普遍采用 2 级模型:养殖点和监控中心。由养殖点的传感器采集数据,再用有线或无线的方式传输到监控中心。例如,海南陵水“5G+海洋牧场” 采用 5G 网络技术,集成网箱海洋环境实时在线监测系统,对深海网箱水质水文环境及内部状况进行实时 在线监测(图 3)。
1 |' y0 ?$ B8 J! ?3 J1 O. _6 f 9 A" X" _. ~0 A3 H
8 P# D3 k( w( O! c
3 O7 S: C0 w* ~1 I& A, G% e8 E0 J
/ U# C/ Z3 C3 Q7 ~: b图 3 海南“5G+海洋牧场”海洋环境监测系统 / v" G, l0 I# z
2 海洋环境监测系统方案设计
* F4 {6 T& `# M, t针对深远海网箱数字化管理和集约化养殖需求,基于高精度温盐深测量仪、无线数据传输网络、 监测信息实时处理与集成等关键技术,设计了与深 远海大型智能化养殖网箱配套的海洋环境监测系统,实现温度、盐度、溶解氧等海洋环境要素的远程实时监测。
+ {' _! P: F `# l1 H2.1 系统组成
! i' R& P3 z0 P" o! q4 o# t海洋环境监测系统硬件主要由数据采集子系 统、控制子系统、数传子系统、能源子系统等组成 (图 4)。软件主要是上位机软件。
8 u3 J2 |6 O& D1 n; `8 C: C4 w$ X) z8 ^, p' s3 ], s: Z6 g
. I |8 ?( g# y& ~' ~1 U* V+ {
图 4 系统组成 7 D3 A1 Q \" a4 \; Q
数据采集子系统包括搭载的各式传感器、配套的电平转换、A/D 转换元器件等数据采集设备,负责采集海洋环境参数。控制子系统包括监测点的主控 Soc 与其配套的控制程序,根据控制指令控制各传感器的采样频率、采样周期、采样模式等,监测各部件运行状态,将操作结果与运行信息反馈至监控中心。数传子系统负责转发监测数据、状态数据至中控系统,转发控制指令至各传感器。能源子系统负责为监测点供电,采用备用电池设计,在主电源切断的情况下可临时供电,保证系统不间断运行。上位机软件是数据采集子系统与集中控制系统及控制人员的接口,主要负责监测信息实时处理与集成。 q' ^( J3 a( F d n. i, Y
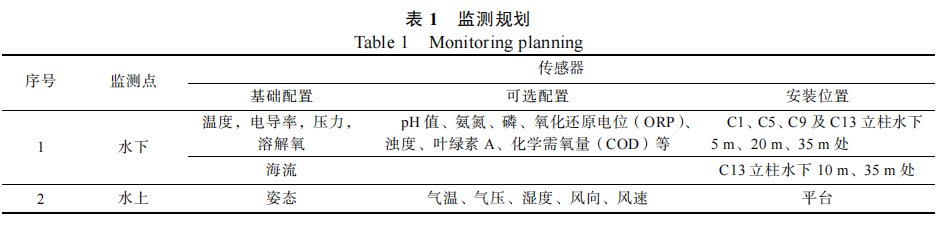
2.2 监测规划 * M3 x+ X$ r9 O6 P
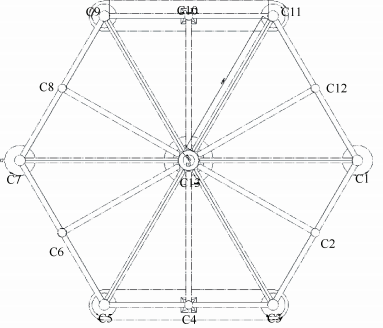
# D" p' J; o% C9 \; V5 ]9 v/ N& K' G以图 5 所示网箱(直径 110 m,工作吃水 40 m)为例,在网箱的中央及外围立柱的不同深度设置若干个水下监测点,实现表、中、底层水体覆盖。每个监测点均配备温度、电导率、溶解氧和压力等通用传感器。在中央立柱设置海流传感器。在网箱平台设置水上监测点,配备姿态、气象等传感器。此外,可根据养殖产品种类的不同选配其他传感器 (表 1)。 , `6 r* l0 ?6 S( g- C# I
; i7 }% R$ v& w; e% @; Q) h
# Z( `% Q& e2 |图 5 养殖网箱示意图
9 W5 L5 L2 ^5 n8 f+ T+ f* t+ n2 z3 }
' X6 @! \; r* b2 w# r u" X5 N
: a$ W6 ]% d3 Z3 x
; Y: f, J8 S5 \+ @! h" ~. H5 r/ p/ A& |5 t; \
3 硬件设计 " n' a+ r, ?9 {( Y1 c Z. W/ o
3.1 高精度温盐深测量仪(CTD)
, j+ u" x/ l1 c4 b7 Y, |CTD 是数据采集子系统的核心设备,其性能对监测系统的技术指标具有决定性影响。CTD 由温度传感器、电导率传感器、压力传感器、测量转换电 路、综合控制系统、耐压舱等组成。测量时,由传感器感应海水的温度、电导率及压力要素,通过转换电路将物理量变成电信号输出,由综合控制系统接收并通过通信接口传输测量数据。高精度 CTD 研制的核心工作是温度、压力和电导率3种传感器的研制,重点为电导率传感器研制。研制的七电极电导率传感器具有较高的测量精度,其电导池实现了电流电极和电压电极的分离,可显著减少电极极化阻抗,导流空间大,响应时间快。七电极电导率传感器的电导池两端有 2 个 接地电极,可有效屏蔽外部干扰。研制的温度传感器采用新型微结构形式,具有快速响应、耐高压等特点。此外,还研制了硅压阻型压力传感器(图 6)。针对网箱监测点多套 CTD 同时工作的应用场景,在测量电路(图 7)设计方面采用了低功耗及抗干扰设计。通过选用低功率器件,降低功耗及温度。通过降低单片机的晶振频率,减小来自电源的噪声,在尽量靠近 A/D 转换器处接地以及屏蔽振荡器区域,来增强抗干扰能力。
3 i8 s/ p! ] G6 W( E- I" [8 `+ f+ h) }2 M1 s7 e/ I3 M
: h$ Z4 h. G3 q) b' v, t+ o9 \8 U" z Y( r! m$ X% V- Z- |
图 6 电导率、温度、压力传感器
) [5 k, [2 T; Y& `6 f
% [! y+ Q0 O7 n! {9 K6 B- V图 7 测量电路
9 l% ^+ j; o. U( }: |) j: I" }- b }3 E
8 J! U L. C3 i, u( B( P3 f. t, f' f* ^" j6 h. D) Z0 s
完成 CTD 样机加工及相关调试后,为保证测量准确性,利用 CTD 校准实验室开展了传感器校准(图 8)。通过试验方法建立了传感器输入输出关系,进而获得校准系数等相关参数。 L Q; X) Y, E2 |. E( ]
. H) b; [7 T, `7 F' D9 s图 8 传感器校准
: U/ Y3 M$ T# w3.2 数据传输网络; d6 d" l( X+ ^/ t7 |/ K3 H0 {
由于深远海养殖水域远离海岸,需采用有线/ 无线数据传输网络将网箱数据实时传输至岸站。综合考虑成本、功耗及通信技术发展趋势,采用网箱有线组网、网箱与岸站间无线传输的数据传输方案。网箱监测点的传感器通过串口服务器、网线等连接至以太网交换机,组成局域网络。网箱与岸站间架设一对无线网桥,上位装置以及无线网桥也连接至千兆以太网交换机,实现网箱与岸站监控中心的无线数据传输。无线网桥采用 airFiber®X AF-2X,具有高达 17.1 Mbps/MHz 的频谱效率,发射距离超过 200 km,吞吐量大于 500 Mbps,可以 设置不同的上行与下行任务周期来满足非对称流量需求。如图 9。1 c% E- _* b, }' d( a
8 j7 }. _- N4 y
图 9 数据传输网络示意图
1 f" @$ O& u0 z: p: }4 软件设计 . n& U/ M% v; U. L+ ?+ P/ v; Y( |1 O
监测点将数据传输至岸站,通过上位机软件实现监测信息的实时处理与集成。上位机软件的主要功能为实现人机交互,将采集的数据、工作状态等信息进行图形化集成显示,便于中控系统控制以及人员实时监测,同时提供下位机控制接口,将上位机控制指令实时传输给数采子系统。软件具备数据采集、数据存储、数据显示、数据输出及传感器控制等功能。软件可采集温度、电导率/盐度、压力/深度、溶解氧、流速、流向及姿态等参数以及工作状态信息,采集频次可调;采集数据存储于本地数据库;以文字、实时曲线等方式显示;以 UDP 报文形式输出至中控系统;可控制传感器开关及观测频次。软件开发环境为 Microsoft Visual Studio。数据接入部分使用 C#/Golang/Rust 编写,从串口接收解 析消息帧,发送操作指令,采用第三方 WebSocket 库。数据库方面,由于需承载的数据量较小,选择应用广泛的关系型数据库 SQLite 和 MariaDB。3 h/ O; `/ r( J2 g# h
系统需要管理主要资源是设备和数据信息,因此数据表分为 2 类,分别存储设备和数据信息。每一类数据表均有 1 张总表,保存所有设备的基本信息和所有消息的基本信息,作为指向详细信息的索引。对于每一种设备/消息,均有一张设备/消息表存储所有该类设备/消息特定的信息。应用服务器连接数 据接入单元,同数据库通信,对外提供 RESTful API。浏览器即可作为客户端,简化额外软件要求。使用 WebSocket + Json 交换数据。实时显示传感器 数据,使用 Echarts 3 和 Measurement Studio 可视化历史数据。观测数据存入数据库中,除使用客户端 查看历史曲线外,还可以使用通用数据库管理软件 (DBeaver、Navicat 等)管理数据,也可导出为通用格式(.xls、.csv、.txt 等)进行后续处理。
5 t% N8 M! i1 A2 v/ ?6 \9 X5 z5 水池功能验证试验 $ {3 o' I! a0 [
开展了海洋环境监测系统(包括 CTD 及上位 机软件)的水池功能验证试验(图 10),对监测 系统的数据采集、传输等功能进行了初步验证。通过与美国海鸟 SBE–37 CTD 的水池比测,系统工作状况正常,监测数据正确、稳定、可靠。
% |; k2 m$ g7 g, i, H. p* [3 j, ^+ J. E: V# W* \
图 10 水池功能验证试验 * y o4 M; A, R9 i/ |+ v3 n3 k
6 结束语4 @: D% w5 {& n& k C
系统初步实现了温度、盐度、溶解氧等海洋环境要素的远程实时监测,但在长期工作可靠性等方面仍有待检验,在监测要素及数据处理应用方面仍有待拓展。
2 ?, g" E" c! ^下一步,计划研发集成化学、生物等多要素传感器,开展监测设备海上长期应用试验,开 发水质预测预警等数据分析产品,满足数字化管理和集约化养殖需求,提升海洋环境监测及渔业养殖装备国产化水平,助力“蓝色粮仓”建设。
3 j+ N( T9 L7 T& y
/ f* p1 Y( {$ _5 m0 ]' i$ W5 c该文章来源互联网,如有侵权请联系删除& ~+ c5 K/ t' [5 U
查看原文:www.52ocean.cn | 



 ; E8 ?. G; C! e, j
; E8 ?. G; C! e, j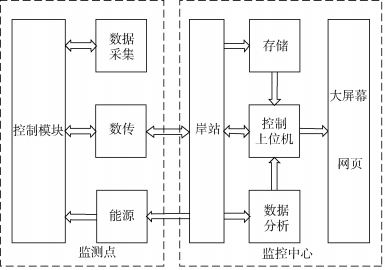
 $ k: Q0 a4 A6 [; t5 O6 E0 X
$ k: Q0 a4 A6 [; t5 O6 E0 X & p" k l+ @4 {3 K# k7 n
& p" k l+ @4 {3 K# k7 n
 6 V' p) \$ C) V
6 V' p) \$ C) V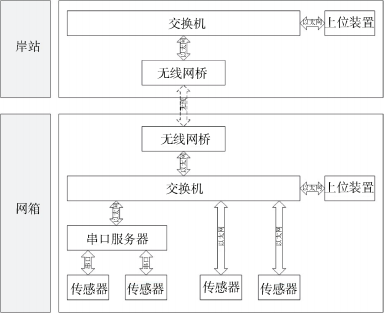
 . t1 k: i- j- u& e
. t1 k: i- j- u& e