' t% b( p- Z* L# U深海具有战略纵深、便于充分利用广阔的战场空间布放各种平台、传感器、无人潜航器充电站等装备;深海声道轴、可靠声学路径等深海通路、信道具有先天的探测、通信优势;深海环境稳定,不似浅海区域背景噪声大,混响严重,可使装备稳定的发挥最大的作战效能。鉴于此,深海将成为世界军事强国争夺制海权的前沿阵地。近年来深海领域的前沿装备技术发展活跃,尤其是美国,取得了丰硕成果。7 f1 {5 J: N: p2 A7 \) r, H
一、深海电子信息系统技术发展现状+ P7 b% L2 d' X
深海电子信息系统技术主要包括深海探测技术、深海通信技术、深海定位导航技术等。国外根据对深海探测、深海通信、深海定位导航的军事需求,力求发展前沿颠覆性技术以弥补现有技术的不足,提升军事能力。
/ p0 K) d4 A! [1 r: H) [ }/ o- c(一)深海探测装备技术发展现状6 _+ w/ I5 x3 p) G8 g: ~( V
1、背景
8 G1 C- y; d5 n/ i& r. y近年来,先进的安静型潜艇广泛应用主被动降噪技术,低速航行时的辐射噪声接近甚至低于海洋环境噪声水平;无人潜航器等新兴水下平台数量多、体积小、航速低、噪声小,未来将大量装备,在广阔海洋中执行各种作战任务。在水下战中,探测是至关重要的环节,但浅水环境时变、空变性强,受浪、流、温、海上交通、水中生物影响严重,且缺少纵深,混响严重,探测性能不佳。深海干扰少、空间广阔、声道探测性能好,深海探测技术为解决潜艇、无人潜航器的探测提供了新的技术途径。( ?3 Y, e* [9 P ^2 I' s1 |
2、发展重点
: p* h7 {0 X4 Q) k2007年美海军开始研发“深海主动探测系统”(DWADS),是由水面浮标、声源、体积阵组成的无人值守探测系统,通过水面舰布放,一套系统探测近1万平方公里的海域,多套系统组网,可大范围探测往来的潜艇。2007年该系统启动研发工作,2009年完成样机海试,2011年完成升级版海试,目前作为向型号转化的备选方案。
$ o! Y: F+ k0 y5 k$ {0 e* {; t: N' r0 q
2 L) D- S' y8 {1 {2010年美国国防高级研究计划局(DARPA)开始研发“猎潜系统”(SHARK),是数十个无人潜航器携带声纳等传感器组成的深海探潜网络。该网络水面舰布放,采用自下向上的探测方式,避开了舰艇声纳横向探测常遇到的因海底和海面声波折射造成的目标模糊问题;还具有较好的机动性,单个无人潜航器探测直径可达55-75千米,数十个组网可探测大面积水域,为航母打击群等高价值装备扫清海底威胁。2010年该项目启动,2013年完成无人潜航器大潜深试验,2016年进行海试并完成研发工作。
1 }% ]7 ?+ V8 K& }& X# f' u% f$ @: {0 V( e7 z' K
2013年美国国防高级研究计划局开始研发“深海上浮式有效载荷”,由运载器、有效载荷、通信系统等组成,水面舰布放,预置水下4千米,可在海中待机5年,需要时远程唤醒,快速释放无人机、传感器、导弹等载荷执行探测、打击任务。2016年6月完成运载器测试,按计划2017年完成研制,虽未见报道,但2018年已停止研发经费拨付。/ w; w8 l @2 I3 Y' e- G- D7 k
(二)深海通信装备技术发展现状
& H& h( e7 x7 R3 s6 A) \! v1、背景5 m8 _5 o9 [$ H0 ~2 J: b$ M R
未来水下作战模式中,将形成海-空-天一体化协同作战网络。目前,水上部分使用高速、宽带的电磁通信技术,已实现联合作战,重点突破对象为水下各平台、传感器之间,水面、水下跨域的通信问题,以实现水下潜艇、无人潜航器、传感器阵列等节点之间顺畅的信息传输。在此背景下,潜艇需要在深海巡航状态下与其他潜艇、无人潜航器、水面舰、飞机、天基卫星实现安全隐蔽的通信,深海作战的无人潜航器也需要与其他水下平台、水上指控中心进行安全隐蔽的通信,深海预置平台也需要有效可靠的通信技术进行唤醒。( O6 K; r/ C2 W: ^9 M
2、发展重点6 ?- f& l3 \; ~7 ^# |/ z- h
2007年美国开始研发“巡航状态下潜艇双向通信”技术,主要是应用浮力电缆天线、通信浮标组建通信链路实现巡航状态下潜艇的双向通信。该项目有三个阶段,第一阶段研发浮力电缆天线和“深海汽笛”战术寻呼浮标,实现潜艇与水面舰之间进行双向数据交换;第二阶段研发非系留的声学到无线电信号网关浮标、两种由潜艇发射的系留浮标,提高双向通信的数据传输速率;第三阶段进一步改善系统通信能力,提高对特种作战部队的任务保障,加强全世界范围内的寻呼能力。该项目2007年启动,同年12月,美海军成功完成高频互联网协议系统试验,验证了浮力电缆天线,2011年4月,“深海汽笛”战术寻呼浮标水声通信系统完成北极冰层下与外界的通信试验。根据研发计划2015年完成研发工作,但未见报道。2 J! @2 k- @ s( w
4 z* P8 h g9 r
图3 “深海汽笛”系统部署过程
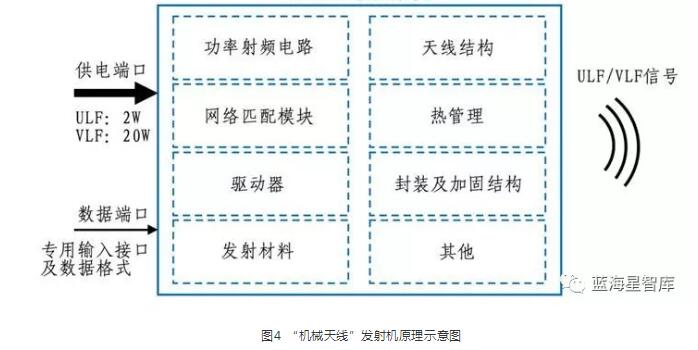
3 k6 A. X1 F8 S9 H: g1 U2016年,美国高级研究计划局启动“机械天线”项目,主要是研发适用于无人潜航器的小型电磁发射机。不同于传统发射机,该发射机由带有强电场或强磁场的特殊材料的机械振动产生电磁波,比如利用磁棒按特定速率反复移动产生甚低频/超低频信号,采用功率射频电路、匹配网络、机械振动驱动、电磁波发射材料、天线结构、热管理组件、封装与加固结构等技术,在目标频带产生电磁波,并将原始数据调制到射频载波上。2017年8月陆续向6家承包商授予合同启动第一阶段的研发工作,预计2019年第一季度完成第一阶段。
8 @3 Y+ _' H( E2 F m! \5 I" a5 Q
, y3 x3 _' q5 ?- r3 t1 j(三)深海导航装备技术发展现状1 c" a! M* L3 y
1、背景
( x/ L6 c/ U' S# C由于水下电磁波衰减严重,不能依靠GPS进行导航,水下平台通常靠昂贵的惯导单元等水下传感器获得定位导航信息,但随着时间的积累会产生误差,需要定期上浮接收GPS信号进行修正,既影响了水下平台执行任务的效率,又容易暴露自身。深海导航问题仍然是水下平台所面临的主要技术挑战之一,目前主要发展方向之一为深海不依赖GPS的连续高精度导航技术。
8 ^" \& k, H# p) Y% _2、发展重点
2 E- V/ G e3 B" j5 z3 N* V2016年,美国国防高级研究计划局开始研发“深海定位导航系统”,通过在深海海底布放少量声源,使潜艇和无人潜航器等水下平台获得连续高精度的水下导航信息,不需要定期上浮,充分保证了自身的安全性和执行任务的高效性。2016年授予BAE公司第一阶段合同,2017年报道称正在进行第一阶段的研发工作。俄罗斯报道称,也在开展相关技术的研究攻关工作,未来将应用于水下导航。
* d- u1 C3 \- j% H' a二、深海动力能源技术发展现状
$ F* A V5 ~; `(一)背景% |3 u; f- Y( |7 w& i8 i
动力与能源技术是深海装备发展的保障性技术,世界各国主要研发适用于深海无人潜航器的前沿动力与能源技术。目前无人潜航器多使用蓄电池为主要动力形式,续航力约10~40小时,难以满足水下作战对续航力的要求。为适应长期情报监视侦察或作战,需研发长续航力、高可靠性的系统,将水下续航力提高至几天甚至几周。此外,为进一步提高无人潜航器水下续航力,扩大其部署范围,国外还在探索水下充电技术,在无需回收的情况下,为其补充电能。
+ }8 C9 S) ]; {+ y(二)发展重点
8 p0 w- E( |9 Y! T2011年,美海军正式启动大排水量无人潜航器燃料电池创新性海军样机项目,发展容量达1.8兆瓦时的燃料电池,峰值功率为37.5千瓦,巡航功率700瓦,希望将无人潜航器的续航力延长至70天。2011年开始研发工作,预计2018年开展水下试验。4 ~. `( h" W# d0 h1 \
美海军也启动了“前沿部署能源与通信基地”项目,设想在3000米左右深度的海底布设一定数量的能源补给点,连线可绵延数百千米,寿命超过20年。潜航器在这条线执行任务就如同汽车在高速公路上行驶,能源补给点则如同加油站,潜航器可以在补给点补充能源并中转数据,保障了水下长航时、远航程作业。2015年项目正式进入美国海军样机项目,目前正处于研发阶段。俄罗斯也在研发水下核能充电站,为北极地区的无人潜航器提供能源补给。" x0 D: a0 B3 Q, a
三、深海装备材料技术发展现状
% d/ ?& c7 R0 H5 T o8 I深海装备材料技术是深海装备不断跨越的技术先导,是人类进行深海探索必须首先解决的关键问题。随着各国深海探索的不断深入,深海空间站、深海潜器等装备设施对相关材料,包括各种结构材料、先进浮力材料等的要求也在逐步提高,这种要求反过来也促进了深海材料的不断发展。+ x. ^& L0 l" P/ v' a
(一)耐压壳体材料发展现状/ B. \) @8 k7 L8 r3 J6 S
1、背景
5 h. \+ M$ Q0 p/ T3 j) X: l耐压壳体是深海装备中不可或缺的重要组成部分,它不仅是载人装备上唯一能保护人员安全的装置,也是各种潜器中电子设备及相机等正常工作所必须的“防护罩”。深海装备在海底作业时不仅需抵抗海水腐蚀及应力腐蚀,还必须承受载荷对结构的考验及深海环境的高压强(在6500米深处压强约为680MPa)。 h" y% x# ]" W$ x$ J
2、发展重点
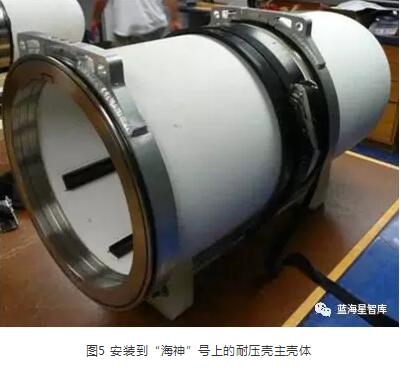
. t( x ]' {5 y) V% v$ C5 Y8 Y美国“海神”号深潜器可潜11000米深,耐压壳体的材料选用氧化铝陶瓷。“海神”号有大小两种耐压壳,均采用氧化铝陶瓷/钛合金建造。其中,氧化铝陶瓷占96%,是壳体的主要构成材料,钛合金环起到连接两个陶瓷壳体分段的作用(在使用时采用高强度的环氧胶粘合到陶瓷上)。这样设计的耐压壳在水中的重量要比采用纯钛合金制造的耐压壳轻331千克。
# u7 V- v) P7 q( ^) |1 A 5 t5 J' o3 w; B3 Z! G
+ k0 |8 g0 ?+ l2 R, g
日本“深海6500”载人潜器下潜深度可达6500米,耐压壳体为球形,采用钛合金(Ti-6Al4V-ELI)建造,内径2米,壳厚73.5毫米,舱内能容纳两名操作员及一名研究人员。
- }- C4 l( ^" ?- L' [# p5 K俄罗斯是当前采用钢作为载人深海潜器耐压壳材料的唯一国家,其两艘“和平”号载人深潜器最大潜深均为6000米。耐压壳球体内径为2.1米,壁厚50毫米,可容纳1名操作员及2名观察员。该球体采用超硬马氏体时效钢合金建造,这种合金含有30%的钴,此外还含有镍、铬、钛等合金元素,其强度/重量比要比钛合金高10%。球体是用铸造和机加工获得的半球体经过螺栓连接而成的,这样避免了焊接接头。该球体的密度与水的密度相近,使得该型潜器能够在不同的深度更灵活地移动。
( B4 d! D3 H3 d' A ~$ s(二)高强度固体浮力材料发展现状( u9 p \. Y* p
1、背景& K, M3 T. K) @! c8 o
高强度固体浮力材料是发展现代深潜技术的重要组成部分,对保证潜器尤其是大潜深潜器所必须的浮力,提高潜器的有效载荷,减少其外型尺寸,提高潜器水下安全运动性能具有重要作用。好的固体浮力材料必须同时具备耐压强度高、密度小、吸水率低的特性。目前在深海装备上使用的高强度固体浮力材料主要为低密度、高强度的多孔结构材料,属复合材料的范畴。
4 E3 {" G9 Y9 k2、发展重点
4 _* L1 R8 \0 {$ T/ w* t# G) O美国“海神”号上的浮力主要由1670个小的无缝陶瓷浮力球提供,浮力球外径为91毫米,所用材料为99.9%氧化铝陶瓷,提供的储备浮力为45千克。每个小球的外面都包覆有5毫米厚的聚氯乙烯(PVC)材料来提供抗冲击防护,此外这层“外衣”还能提供19克的净浮力。每个小球在11000米深处能产生的浮力是306克。. m0 [3 f& \# A' |$ O r% o8 N& R& Z
日本的“深海6500”载人潜器在浮力材料上选用了复合泡沫塑料,其比重仅为0.54,几乎与“深海2000”上的浮力材料比重相同,但破裂强度是后者的两倍。该浮力材料是将两种不同大小的中空玻璃微球(小球的直径大约为40-44微米之间,大的中空微球的直径约为88-105微米之间)添加到高强度的环氧树脂中得到的,因而在实现高强度的同时获得了较理想的比重。
6 d2 G, s$ S1 K( k+ F1 J四、小结: o' `/ U, s' S& {4 e
新时期、海上力量发生新的变化,世界各国均作出相应的战略调整,也更加注重深海空间的争夺。美海军战略正在从“由海向陆”转向“制海和由海向陆并重”,在探测、通信、导航、能源动力、材料等多个前沿技术领域开展了大量研究工作,通过创新的方式推动单向技术的进步,并全方位合理布局未来作战所需的技术,以提高作战效能。欧洲各国也较为重视深海空间的利用和开发,在深海领域取得了一定成果,但与美国还存在差距,发展的还不够充分,涉及的装备技术领域也不够全面。4 f# D7 i8 l" K9 P3 ?
E8 k; | m/ C/ D9 X
信息来源:蓝海星智库 王晓静 马晓晨 方楠
& Y) ~7 [2 e$ G/ T
$ k; s/ t# o& w, d% ]$ R" P4 K* k
_! N9 j- Z6 `( r查看原文:www.52ocean.cn
I8 l) S g6 ]9 C
7 @* O, p' N; G9 P/ d* I) l) C) O1 N7 t( \ ?- z
该文章来源互联网,如有侵权请联系删除 |


 9 z+ |4 H( s$ r, n
9 z+ |4 H( s$ r, n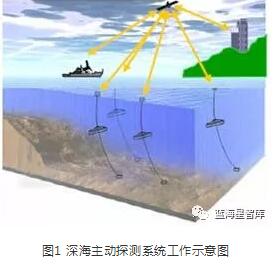 4 Q1 h3 T% M" x p) ]( ]
4 Q1 h3 T% M" x p) ]( ]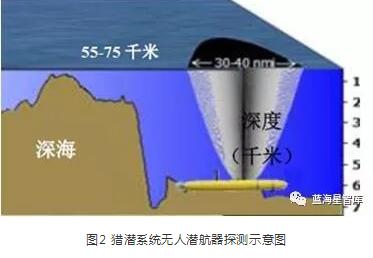 4 C& e+ _2 X$ y5 t3 E: p
4 C& e+ _2 X$ y5 t3 E: p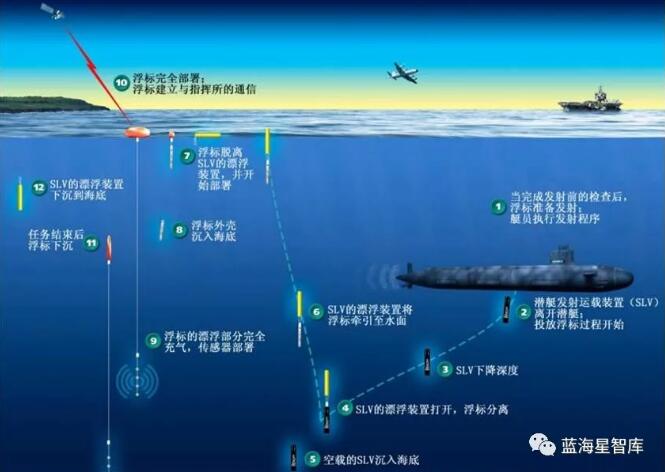
 ; e& D, {+ P7 |" p6 ^. W V2 L
; e& D, {+ P7 |" p6 ^. W V2 L