|
从1984年起,我国已经进行了30多次南极科学考察活动,开展了海洋、气象、冰雪、空间、遥感、生物生态、地质、地球物理和测绘等学科的考察与研究,在一些重点领域取得了突破性进展。 7 E3 W/ s$ G; B l3 W( X
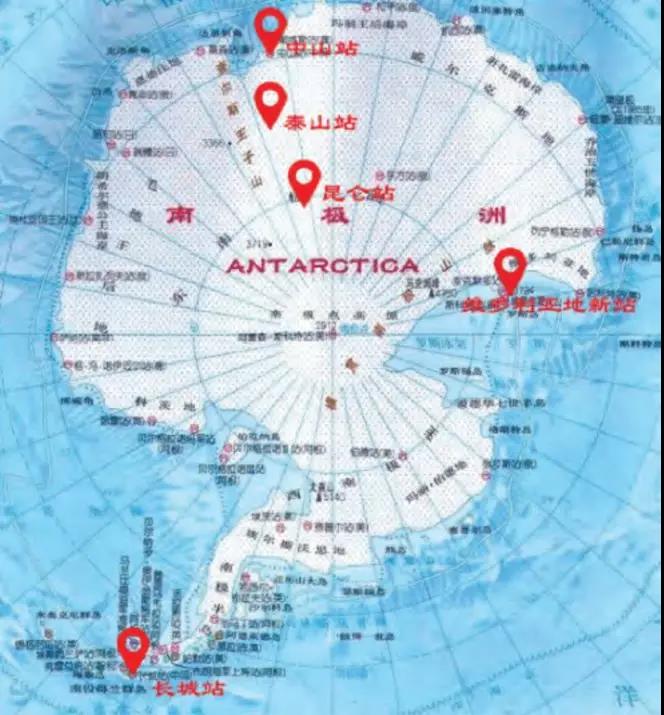
我国的南极科学考察事业起步较晚,但起点较高,已先后建立了“长城”“中山”“昆仑”“泰山”等考察站,近阶段计划在罗斯海西岸的维多利亚地附近建立第5个考察站,第29次至第33次南极考察队连续5年开展了现场选址勘察工作。
) K4 O" X( i5 x0 T
- E s- k* P* P) r) S图1 中国南极科考站分布 ! \2 {; T0 d$ N8 P2 T' L0 v
一、需求 , o9 v0 X* S: M( G' P6 D
极地考察需要大量的物资、能源支持。极地考察船是具有破冰能力的综合测量考察船,随船搭载有极地考察和建站必需的工程机械、运输工具和各种考察设备。南极大陆与其他大陆不仅相距遥远,而且周围还被数公里乃至数百公里的冰架和浮冰所环绕,周围海洋中还漂浮着数以万计的巨大冰山,给海上航行带来了极大的困难和危险。 , q$ C1 i; U. ?4 J. s; v4 @6 \% J
鉴于南极大陆附近海域的特殊性,开展海洋测绘存在诸多困难。目前,环南极水下地形资料极度缺乏,在极地海域,全球范围内只有小比例尺海图,尤其是南极沿岸大比例海图资料接近空白。海图资料大部分年代久远,其精度和时效性都难以满足人类日益频繁的南极科考之需。 & d# A) Y: a- w! A- L- U6 k5 X
由于缺乏精确的海图资料,大型科考船在靠近南极大陆作业以及对科考站进行补给时无法找到合适的锚泊水域,只能漂航,不但存在安全隐患,同时也增加了对岸运输补给的作业难度和成本。以往,科考船经常利用携带的工作艇对考察站附近海域进行单波束测量,但无法完整地获取精确的水下地形地貌情况,资料可靠性、系统性、测量效率都存在问题。南极科考亟须海洋测绘的支持。 & R7 z5 y# h: D. ?
二、考察过程
+ h5 X5 e5 l( c7 y$ p8 j4 T) N我国第31次南极科考于2014年10月30日启程,执行“一船三站”任务。考察期间,考察队全面完成了包括新站区域地质勘查、难言岛周边海域水下地形测绘等工作,于2015 年4月10日返回上海极地科考码头,全程163天,航程3万海里。作者代表东海航海保障中心全程参与了此次科考行动,执行难言岛附近海域水下地形测绘任务。
! e% n9 a. N9 B极地科考是一项系统工程,现场情况瞬息万变。考察队从作业安全、物资补给、测艇操控、工作安排、测区划定等方面给予了大量支持,确保了海洋测绘工作的顺利实施。 . W" n0 g$ k3 T
⒈陆上工作
7 Q7 f$ D' t. n4 j8 g# w& H; I2014年12月26日,“雪龙”号考察船到达罗斯海难言岛附近,登岛后,考察队员在原生态的南极陆地上工作一周多,利用极昼的有利条件,全天作业,按照国际性作业、环保标准,顺利完成全部考察任务。
' a8 N% r) D/ s/ U# K+ K+ S7 q陆上主要工作是完成定位基准站和自动验潮站的架设以及水准联测等测前准备工作。定位基准站采用Trimble公司SPS852大地型接收机,用于提高定位精度,这也是多波束测量数据条带拼接所必需的,因为南极地区没有设置好的各种地面差分站,卫星差分系统在高纬度地区也无法使用。 , _, h2 Y4 X2 [* c1 U! v
自动验潮站使用瑞士Keller DCX-22自容式潮位仪,数据更新率为每5分钟记录一个水位,数据分辨率1cm,从12月27日中午安装至1月5日下午撤离为止,共收集了难言岛连续9天的水位数据。该数据将用于新站高程基准的确定及测深的水位改正、潮汐分析。
1 B# E% k( \& ? O; V6 E1 N% G5 ]* X5 l5 v$ c8 P
图2 考察队员在难言岛进行水准联测 9 n( j! H; R2 g! g0 I! Z
⒉水上测量 8 i& o. _; W! s; _1 G
根据考察队的统一安排,水下测量小组队员于2015年1月1日上午乘坐“黄河”艇返回“雪龙”号。返程中,领队关注到“黄河”艇船用测深仪上的水深数据,难言岛附近海域可能存在合适锚地,指示考察队员优先对该海域进行全覆盖扫测。
$ U3 K) I' j6 Z随后,考察队员使用测量小艇在难言岛东侧海域开展水下地形测量工作,艇底固定安装Kongsberg公司EM2040浅水多波束,采用200kHz工作频率等距模式。考察队采用IXBlue公司HYDRINS光纤罗经和惯性导航系统进行定位和姿态补偿,该系统能提供高精度实时坐标、航向、姿态和速度等;采用Hypack海洋测量软件进行导航,多波束数据采集使用Kongsberg公司sis软件,最终完成了12平方公里海域的全覆盖扫测。
* }: q/ X( g, ^% e0 r/ J. j5 m" v, F& h! ^* K# R9 K- e, A" E
图3 测量小艇在难言岛附近海域开展海洋测绘
& C2 i8 l5 M1 i# T0 o; N⒊数据处理
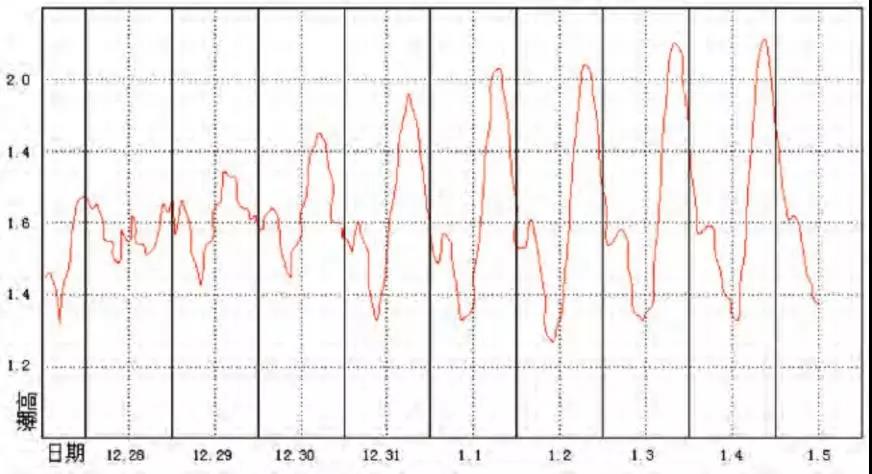
1 c3 B" E6 O: ]( X自动验潮仪采集的水位数据(仪器零点)如图4所示,潮汐类型为不规则全日潮,经数据分析最高和最低水位差0.87m。通过潮位数据计算平均海平面(当地验潮期平均海平面),通过人工验潮比对,确定BM点的平均海平面高程,并通过水准联测反算得到难言岛水准原点高程。 5 B7 b+ t# C* `# `7 I; J* W( T3 _
图4 难言岛水位(仪器零点,2014.12.27~2015.01.05)
U$ f. u& `5 I; \由于未获得足够长序列的水位数据,无法通过计算确定当地理论最低潮面,现场采用最低水位以下0.5m作为假设理论最低潮面。经查询罗斯海水位历史资料,附近有特拉诺瓦湾(-74.75, 164)和罗伯茨角(-77.032, 163.163)两处水位站,水位时间序列分别达到119天和365 天,经准调和分析证明,假设理论最低潮面是安全的。 8 I; ~7 d3 [* h& l
* M* S5 y* F( s- _图5 测量区域与难言岛位置关系
/ R& \% }! h' R表1 特拉诺瓦湾和罗伯茨角历史水位8调和常数
9 j/ j0 E( _8 D多波束数据使用Caris Hips软件,经涌浪数据和定位数据检查、潮位改正、声速改正、条带拼接检查、子区拼接检查,数据质量良好。经与ODOM CV200型单波束测量的水深检查线互相校对,互差符合海道测量规范要求,数据质量稳定可靠。锚地水深图以准确数据证实了考察队领队关于存在合适锚地的猜想,2015年1月5日下午,“雪龙”号科考船在该海域顺利抛锚。
V6 a- c5 y# Z⒋取得成果
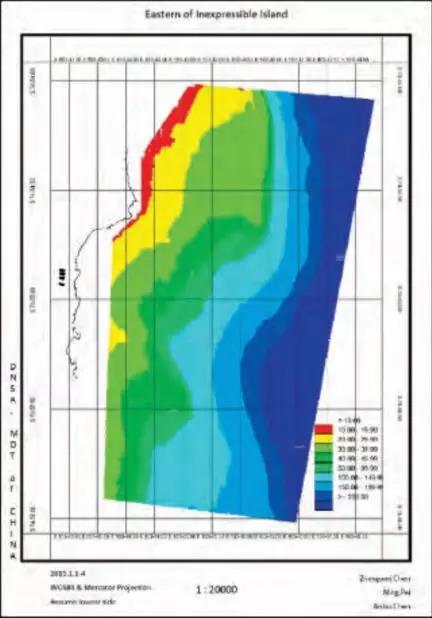
/ W6 F4 j/ ^/ n本次极地科考测量,是我国首次采用专业海洋测量船舶,使用多波束测深系统、侧扫声呐系统等精密海道测量装备,按照IHO-SP44标准(国际海道测量组织海道测量规范特级标准)对南极重点水域进行全覆盖精密扫测。我国首次在南极发现适合大型科考船锚泊的水域,为科考船的航行安全及今后新站建设物资的运输补给提供了有力的保障。 . u; a: e, Y4 a% |' P ^' B
锚地水域水深在20~50m之间,海底地形相对较平坦,大部分海域底质为砂石,锚地水域为全日潮,风向主要为西北风,夏季无冰或少冰,可供大型科考船锚泊、避风。该锚地距离海岸线仅900m左右,能有效缩短人员与货物的过驳转运时间,提升货物装卸效率。 $ p4 y: \- y5 A; Q
水位控制不仅适用于海道测量过程中的水位改正,而且是确立新建科考站高程基准的基础,更是新站卸货码头及站上所有工程建设的基础。由于极地长期被冰盖覆盖,同时海岸线附近地形极其复杂,因此要在极地区域获取高精度的水位数据尤其困难。本地测量的难言岛附近海域无任何水文历史资料,潮汐性质、变化范围等重要数据均为空白。在本次科考测量过程中,虽然受限于人员数量少、作业时间紧张等不利因素影响,但测量人员仍在沿岸基岩上架设了高精度压力式自动水位计,使用无人值守的自动水位计采集了连续9天的水位数据,获取了当地潮汐性质等关键要素。这些宝贵的水文数据为后期测量数据综合分析及今后新站建设奠定了重要的基础。 . N5 q% L3 b e
; u8 V/ u' z2 ], o0 g1 f9 J
图6 锚地水深成果 5 W; Y& ?" ]: w; E$ @2 h
4 j8 h) }9 T9 Q: \8 \图7 锚地水深矩阵色彩
6 `4 P* W, @$ T% e/ s三、总结
. V2 ~9 o5 u# u. g本次南极海洋测绘是东海航海保障中心、中国极地研究中心联合实施的《极地综合航海保障研究与应用》项目的重要组成部分,针对新站建设选址附近海域水下地形有针对性地开展全覆盖扫测。
+ {; v d) [# m1 T2 x2 t. h6 S! K. K2 P若新站确定选址难言岛,新锚地的发现将为新站的建设提供极大便利。即使新站选址附近其他位置,作为专业海洋测绘在南极开展工作的尝试,本工程也能提供借鉴。
5 Z, M; O5 _# h⑴极地事业是国家海洋事业的重要组成部分,加快我国极地考察能力建设对于落实海洋强国建设的战略目标具有重大意义。伴随全球气候变化和国际政治经济格局的新变化,南极战略价值迅速上升,各国纷纷设立南极保护区,加紧南极立法,主张划分外大陆架,强化对南极大陆和海洋的控制。我国亟须加强南极海域特别是建成站附近海域水下地形的测绘工作,获取翔实的水下地形数据。
% q+ e* c6 C" \+ j8 T% H# x⑵极地特殊的气候条件及后勤补给情况容易影响工作效率,所以在前期准备阶段需全面考虑,关键设备需做好双备份;开展工作期间的安全是重中之重,人员、船艇、环境、测量设备的安全,一旦发生意外难以施救,所以工作期间需要考察队的气象支持;南极沿海夏季(12月和1月)气温一般在-20℃~10℃,测量设备及电池等不需要特别考虑气温因素,但如果是长期观测设备就必须考虑越冬期间极端气温的影响,还应考虑测量艇及设备的保存环境。
& j6 D, u* ?* ]0 d" r& I7 R! u8 m⑶南极大部分海域属于高纬度地区,采用常规定位方式很难获得高精度的定位数据,而多波束测量的水深数据质量高度依赖于高精度的定位数据,必须考虑RTK-DGPS模式;工作期间人员紧缺,现场气候环境也不方便人工进行水位观测,所以即使工作时间很短,自动验潮仪也是最适当的工作模式;可先用单波束方式进行大范围、低密度的测量,一旦发现有利水域,尽快开展多波束等方式的全覆盖测量。
7 ]3 J$ v1 P* ?' X Q文章来源:本文来自《航海》(2018年第3期)。 / g! a$ B: s- b8 H7 l: Z/ o
作者:陈正伟 裴宁,来自东海航海保障中心上海海事测绘中心 ' o* {# x% \; j! X- [
7 i5 o' I1 o/ J/ V
| 

 9 l% @' [- M; S2 k4 S& ?
9 l% @' [- M; S2 k4 S& ? 3 U% ^' U; Y4 x# I! T
3 U% ^' U; Y4 x# I! T
 9 v; ^8 l1 w; F5 L; |: w
9 v; ^8 l1 w; F5 L; |: w
 . h! H0 C$ w5 Z* q
. h! H0 C$ w5 Z* q