|
6 P! \6 z! g; |# b: ?. z I) Y 
2 |8 h) T6 _* e D6 \% a# l4 q- n) J 2024年10月18日·北京 + e4 o4 e1 h: b: j! p* K. e' t" h
据国家安全部微信公众号16日消息,国家安全机关工作发现,某境外企业A公司通过与我国具有测绘资质的B公司合作,以开展汽车智能驾驶研究为掩护,在我国内非法开展地理信息测绘活动。该公告引发社会热议,极氪、特斯拉、Mobileye、四维图新等相关企业紧急发布声明辟谣。 ' l) p$ S& I6 {. H% E |
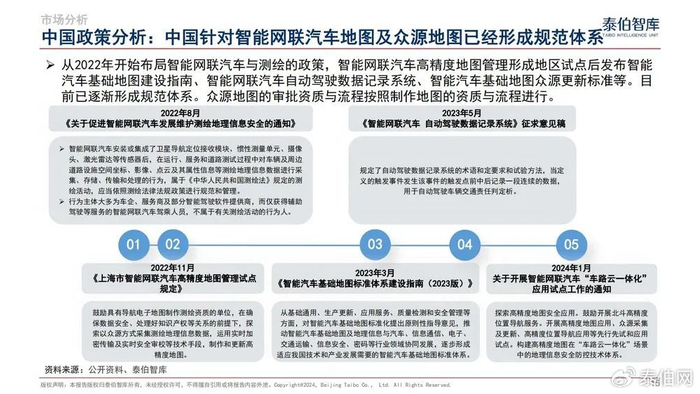
泰伯智库研究团队认为,众源采集和实时地图技术已经成为”后高精地图时代“自动驾驶汽车安全的重要保障,同时也对数据合规和数据安全提出了更高要求,是未来自动驾驶汽车厂商和测绘图商面临的关键挑战。当前,美国、欧洲、日本等发达国家均对众源更新涉及的地理敏感数据和个人隐私保护提出了政策要求。中国针对智能网联汽车地图及众源地图已经形成相对完善的规范体系,同时出台了相关政策鼓励探索以众源方式采集和更新测绘地理信息数据。随着国家安全部门监管技术的不断提升,汽车厂商和测绘图商需要进一步注重众源采集和数据闭环的合规性、安全性。
$ I7 D7 h( K( y8 I! r3 Q6 q 核心观点
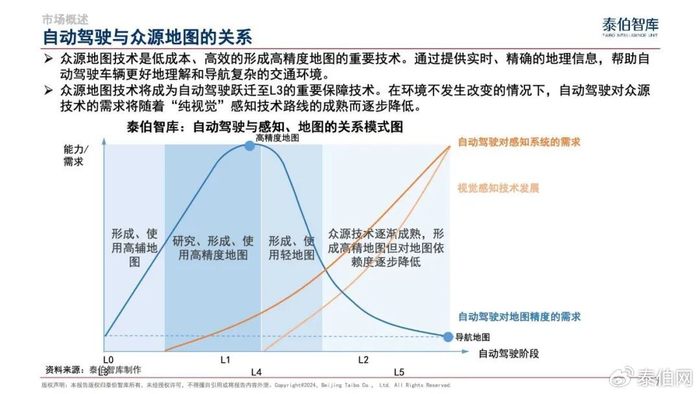
" d& K( x# ?& V5 }) v$ M 众源地图技术将成为自动驾驶跃迁至L3及以上的重要保障技术。目前自动驾驶处于L2+级或L2++级,未达到L3级。L2跃迁至L3还需在稳定性、安全性方面采集大量数据并进行长时间应用落地验证,地图则是重要的安全冗余。在环境不发生改变的情况下,自动驾驶对众源技术的需求将随着“纯视觉”感知技术路线的成熟而逐步降低。 , K! \) _ r9 \0 _0 ? A5 e
众源地图或将成为未来地图绘制的一种重要形式之一。众源地图作为地图绘制方式的新趋势,虽然面临一些挑战,但在降低成本、提高更新速度方面具有明显优势。随着智能驾驶技术的不断发展,地图绘制方式也将不断演进。 0 Q) T1 I% j% \0 @3 v1 t0 o$ V3 n
智能汽车基础地图体系建立,政策、指南、标准更加健全;注重众源地图的安全性。随着《智能汽车基础地图标准体系建设指南(2023版)》的发布,预计到2025年将初步构建起支撑汽车驾驶自动化应用的智能汽车基础地图标准体系。更加注重在数据收集、处理和传输过程中的地理信息安全和个人隐私保护。
$ \6 @; ~* h( V3 e5 P! S; S3 D3 @ 行动建议
7 d' T0 D4 ^8 K& Q& O) O. e- s 在算力充足的情况下利用云边端计算实现纯视觉;众源地图主要作为安全冗余。生成高精度的实时地图。在算力充足的前提下,每辆汽车都成为一个移动的数据节点,能够捕捉并处理周围环境的视觉信息,在车辆本地即时处理视觉数据,形成一个动态更新的、高度精确的地图支撑智能驾驶。 0 E& O4 l7 m9 _) j8 {
建立快速审图机制和开放安全的统一数据平台。目前已有审图机制,采用离线方式处理,难以应对实时更新的增量数据审查,亟需审图技术与管理方法上的突破与挑战。同时,一个开放安全的统一地图数据平台,对于最大化地图数据价值至关重要。这样的平台将促进地图数据的共享与协作,允许各方参与者,包括政府部门、科研机构、私营企业和公众,共同贡献和访问地图数据资源。 " m7 R7 z" D. e6 A. p( M
自动驾驶技术的提升需要感知、预测、规控等模块协同发展。感知模块是自动驾驶汽车的“眼睛”,预测模块是自动驾驶汽车的“大脑”,规控模块是自动驾驶汽车的“手脚”,三个模块的协同工作,是确保自动驾驶汽车能够在多变的交通环境中做出快速、准确反应的基础。此外,随着技术的发展,还需要不断优化算法,提升数据处理能力,加强车联网(V2X)的通信效率,以及完善与道路基础设施的互动,共同推动自动驾驶技术向更高级别的自动化发展。
) t, L1 t6 ~2 l - 本文中内容与相关数据均来源于泰伯智库近日发布的《自动驾驶与众源地图技术路线(政策)研究报告(2024)》。
# x% \( G% F+ }5 P" R1 W 简版报告见图片,获取完整报告请点击下方阅读原文,登录泰伯智库官网或泰伯APP客户端。 1 `6 b+ h5 u+ T: P
2 w5 V g/ y: y6 E& I" R0 | 
+ M- K+ ]7 J& z: T& k$ S0 k
( m, Y1 V( Y* b l
/ C3 O+ t' t5 q% L' | 
' w/ i6 k M0 G p8 H 
6 u& \/ I5 D3 q. g' X5 ]
' D* e* c+ c0 e) X) I; X

# T1 b! v# Y0 r
全文完
% j# c* F# H- s 相关推荐 $ u* x8 O5 k/ j3 q

7 {: [' J5 F& f$ [
, {4 ^" f* o n( I
3 a# W8 y# a% h# Y. O& U
7 X! _( [& P- A8 B) H* z! Z+ _. h& X4 I7 v# r& ^! o6 x
| 











