|
0 ]6 [2 f5 H% W 
点击蓝字 关注我们 关注我们   % V, l3 A: f( s8 U1 O: H
% V, l3 A: f( s8 U1 O: H 全波形机载测深激光雷达系统研制及其数据处理 + g F0 s; U4 i; f' J
引言
6 H/ h2 z2 J' ]$ D. d! i 机载测深激光雷达(Airborne Laser Bathymetry, ALB)技术利用水体在蓝绿光波段(470~580nm)的透射性质,通过基于航空平台的非接触主动探测方式有效克服了传统水深探测方法在非通航区域所存在的适用性问题,具有探测效率高、灵活性强、精度高以及海陆全覆盖等技术特点[1,2],能够较好地解决潮间带、滩涂、海岛、礁盘及其近岸浅水海域的地形地貌数据获取问题。采用全波形信号采集方式的ALB系统在非均匀介质信号分析与目标回波信号提取等方面具有明显优势[3]。深圳大学机载测深激光雷达研究团队针对单波段全波形测深激光雷达系统面临的技术问题,对系统结构设计,多设备集成以及信号接收方案中的关键技术进行了深入研究。重点围绕小光斑机载测深激光雷达系统在复杂环境条件下的非目标噪声信号抑制、目标信号探测范围动态扩展、目标回波信号识别以及激光水下目标空间位置计算等方面内容展开研究[4-6]。通过实验数据处理与分析,对自主研发系统iGreena的主要性能与技术特色进行了总结。相关研究可为后续测深激光系统的产业化和生产提供有效参考。 . L/ J1 H2 g' y b5 x* E9 V
1.全波形单波段机载测深激光雷达关键问题
3 \* @# t+ r3 K* w3 w- W1 R2 Y Y (1) 光学机械结构设计 0 M1 q) A9 O- S, M# A5 N$ o7 r9 A
激光扫描方式对ALB系统的信号接收方式与目标空间位置的解算精度有直接影响。当激光由海面入射至水体中时,激光的入射方向对海面反射率影响较大。在入射角小于20°时,海面反射率约为3%,当入射角大于30°时,海面反射率则高达15%[7]。此外,激光入射天顶角也是影响机载测深激光雷达系统水下探测能力的主要因素,系统的光学机械结构设计应重点考虑水下目标的探测效果。另外,机载测深激光雷达系统是由多个单元所组成的复杂系统[8],紧凑的光学结构对实现系统整体的小型化、轻量化具有重要意义。
7 r" D* z' I! E1 Z# ?1 j (2) 非目标信号的干扰抑制 ' k$ Y' B; M2 G
ALB系统通常采用高灵敏度的探测器实现目标回波信号探测。以光电倍增管(Photomultiplier Tube,PMT)为例,其光敏材料的感光光谱位于400-900nm范围内,包含全部可见光波段(400-700nm).当多路径的可见光回波与系统探测激光回波一起进入系统接收视场后,将会同时造成PMT发生光电感应,影响系统目标探测信号质量。因此,为了提高激光回波信号信噪比,需根据回波信号特点对接收系统光路进行合理设计,从而削弱多路径回波对目标探测信号的影响。 + U& k& f0 t! T; t
(3) 非均匀介质的信号接收
% ]* e1 |0 j# Y/ J' ?4 U 根据ALB系统水深探测原理,水下探测过程中激光信号将先后穿过空气与水体两种非均匀介质。由于激光发散角较小,光束传播截面上的辐照度通常较大,极易受到介质中微粒散射作用影响,特别在距离接收器较近时,散射回波强度远高于远处目标后向散射能量,使系统输出信号处于连续饱和状态。为避免近场强散射造成探测器受损,提高探测器使用寿命,应设计并采用适用于复杂介质环境的回波信号采集方案。
2 ^4 ~) i* ]+ z) A( T, u: u8 i (4) 目标探测范围扩展与信号增强 2 `% _ l: p: @
ALB系统可实现区域范围内的水陆一体化探测。其中,陆地目标与水下目标的回波信号强度通常存在较大差异,为了保证探测器对扫描区域范围内不同反射率目标均具有良好的回波响应特性,应考虑在接收单元中采用针对不同反射率目标的回波信号动态扩展策略,从而提高系统的水深探测能力和对复杂目标区域的适用性。 ; H( _& a$ c. y1 \1 o0 T# E/ Q: r9 R
(5) 全波形信号处理与点云解算方法
8 @" J) [, u) B' V' S! W: x! o 受复杂水体环境与系统内部光学条件的影响,全波形回波信号中存在明显的水体衰减、噪声干扰、波形分量相互叠加、目标回波难以分辨等复杂问题[9,10]。除在作业时尽量选择符合系统本身测深能力的区域以及合理的方案设计之外,建立并采用有效的数据处理与目标回波信号筛选方法,实现水下环境信息的准确提取以及空间上不同层次的回波时间位置识别与探测,对提高系统测深性能,完善激光测深数据处理方法以及降低硬件成本具有重要的现实意义与应用价值。
) ]' }; C' m% I: S2 q: c2 n 2.单波段测深激光雷达系统设计与实验 ! K. M; x& j; e2 k/ x0 Y
2.1 系统研发 ! b0 `+ X1 I- [
深圳大学机载测深激光雷达研究团队通过广泛深入地理论论证、整体设计以及实验验证,于2019年底研制完成了具有自主知识产权的实用化机载单波段测深激光雷达系统iGreena,该装备实现了我国在机载单波段测深激光雷达研制领域的技术突破。系统采用超高频小波束角蓝绿激光探测技术,使激光雷达回波信号采样率提高至1.25GHz,并将探测激光发散角缩小至0.428mrad。相比国内外同类设备,该系统设计有效减小了回波信号中的目标辨识误差,简化了点云解算及其误差模型,提高了波形处理与分析过程中水陆目标的探测精度。 , y4 K9 b1 L: Y% M# p0 y
(1) 系统光学机械结构
3 W' `$ v2 c8 }- Y+ k: y w9 i* E 系统采用避免发射信号与回波信号相互干扰的光路同轴策略。紧凑、高效的光学机械结构设计在优化探测激光发射效能的同时有效降低了扫描结构的复杂性。 2 X2 E' O! z6 I$ r- \! ~2 L c
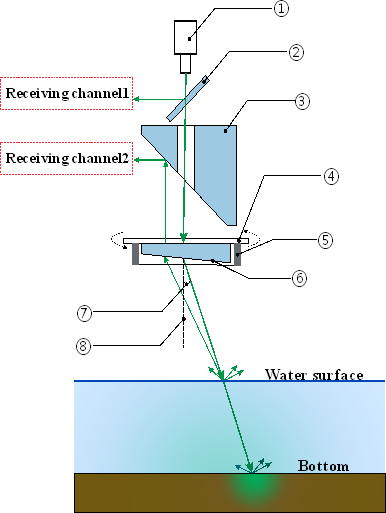
, M) |8 U; X+ c, X9 j* j8 ~ 图 1. 机载测深激光雷达原理与光机结构设计(①激光发射器; ②分光片; ③光学角反射镜; ④扫描角度编码器; ⑤扫描电机; ⑥楔形旋转棱镜;⑦发射激光天底角;⑧扫描旋转轴线)
; J: i9 ?( q9 m+ u, Z* k. s 系统采用旋转楔形扫描棱镜方式,使系统在静止扫描时的发射激光在空间形成完整的圆锥形的扫描射界。其中,激光出射角度始终保持固定,有效简化了计算模型并降低了扫描系统的误差。 ; d& i! [% |5 s6 G
(2) 信号接收通道优化
# s2 D! s7 ]2 k$ i5 m+ v' W 针对系统单波段小光斑(波束发散角约0.438mrad)激光探测特点,系统在研制过程中设计采用了限制激光回波来源方向与波长范围的光路接收结构,削弱了多路径回波能量与环境背景光等非目标回波信号干扰。
& `. b" ~) T) V" m: g$ a( e# I' N 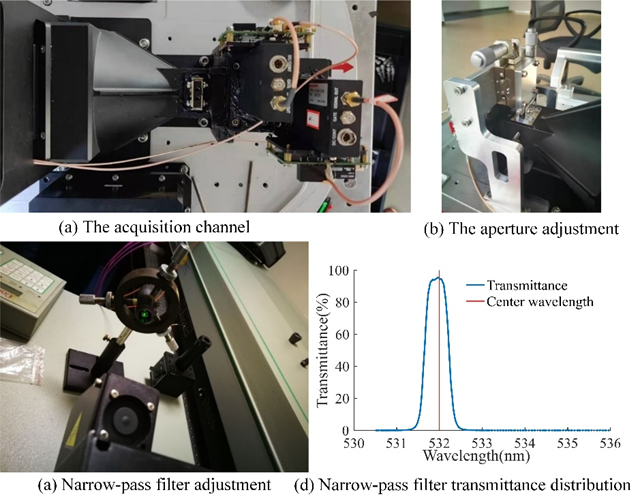
6 H" ~: O6 N r- b: g, _/ o
图 2. 信号接收通道与系统优化 ( K: C+ M( n; A' q+ `8 Q
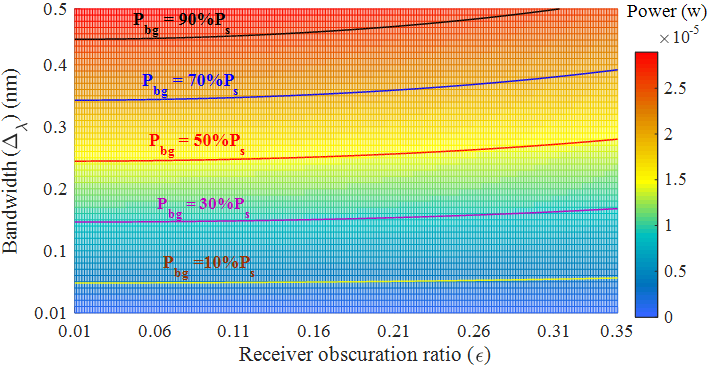
- j" j( F) Y- A8 Y 图 3. 接收器遮光率与窄通滤波对环境背景光功率的限制效果( 光回波辐射,回波中的环境光辐射) + `) ~9 D% `- i) F
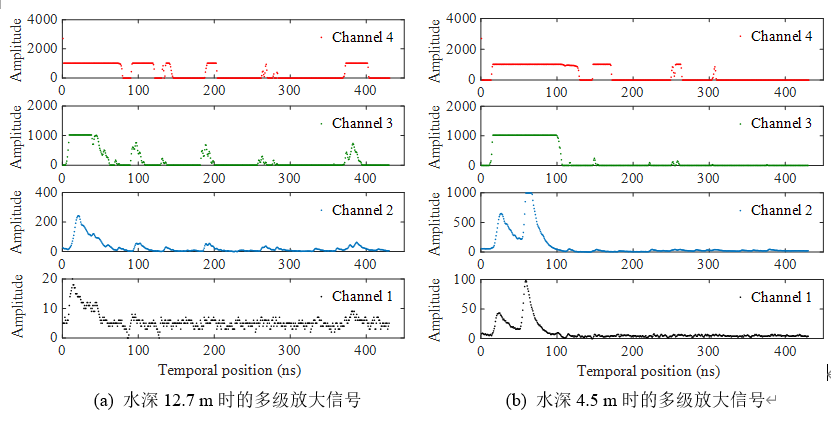
(3) 回波信号多通道放大
' h6 W t8 W, @7 ]5 i) Q0 @ 利用光电转换电路通过阻抗变换网络将光电流信号转换为电压信号,该电压通过四路独立的级联放大电路进行放大,放大电路采用对称电路结构设计以减少通道间模拟信号相位延时,同时,采用交叉递增的强度增益设计,确保通道之间的衔接性和探测目标范围的动态扩展。 ; Y0 b+ P; Y% O _7 Q3 L/ E1 H
3 X! j0 m& A8 W- I* q
图 4. 不同水深条件下信号多级放大效果 7 n, _) e! D$ }" O
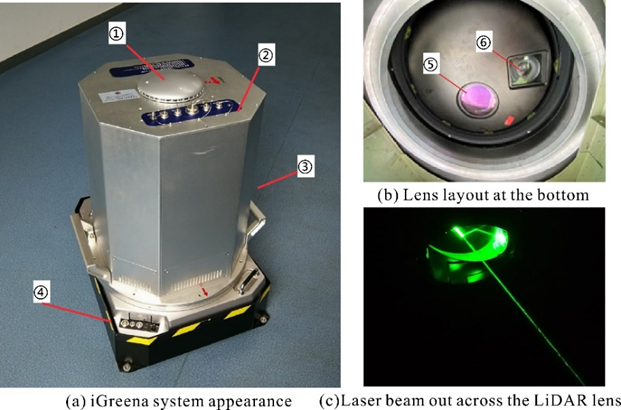
1 F! D$ s3 I; l' d4 ], _9 y+ h 图5. 机载测深激光雷达系统. ①风冷散热系统; ②接口面板; ③激光雷达外壳; ④惯性稳定平台; ⑤激光雷达镜头; ⑥航空相机镜头. / [. T& p. @, c) ?% ?, O* y0 X
2.2 飞行测试
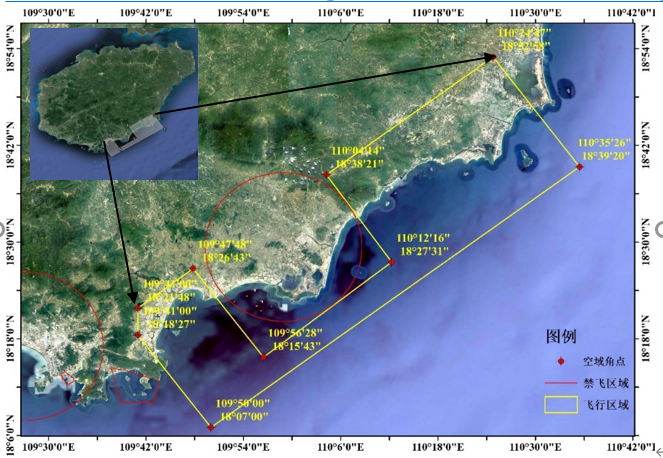
5 J. Y% U1 S2 a* | 深圳大学机载测深激光雷达研发技术团队于海南岛东部海域对系统整机进行了飞行扫描测试,并对近海岸不同水体环境特征条件下系统的探测能力开展了实验测试,测试海域及周边水质良好,天气晴好,东风4-5级,海况条件良好。累计航线长度超过200km。 2 W, l+ ?% V# E
1 }, o8 d; g3 Y- W
图 6. 海南东部沿海地区飞行测试 # d8 b$ e: X3 C9 |) m
0 `$ \6 K- c! }9 x/ ?
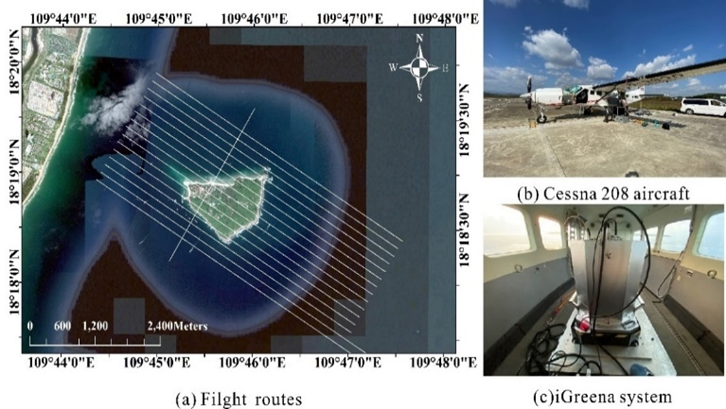
图7. 蜈支洲岛飞行测试
# g C2 Z, Q |: U$ Z6 r 其中蜈支洲岛东、南和西三面海岸主要以基岩型海岸为主,水深较深,且水下地形变化复杂。海底底质多为礁石,北部为砂质海岸,水深较浅、水下地形变化平缓,底质为细砂反射率大于15%。在水深调查后发现,该岛南部地区较窄,离岸平均宽度约50m,大于50m范围内的水深发生较大变化,西部次之,平均宽度约80m,北部平均宽度250m,最宽处约 430m。
% p6 `6 ?) T" H, v2 X7 ` H 2.3 实验结果分析 1 a, H( Q/ n- o8 d* @& }
(1) 水陆多目标全波形回波信号
5 v" k* B: {7 [8 O j7 X 实验采集的波形数据结果显示本系统接收回波信号具有良好的辨识度,可有效反映不同目标与环境特征条件下蓝绿激光回波信号的响应特征。
' f5 }& \/ _, j0 G' s 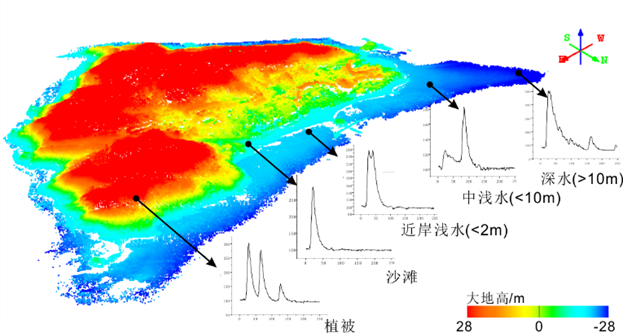
1 o7 j9 H' d3 ?! K( Q+ r7 H: y 图8.海岸带不同目标回波波形信号
8 [ x- R& l( x, e% S$ t 回波波形可直观反映地物特征属性,但空间特征不直观;点云数据的空间位置明显,但对应的属性特征往往不够不明确。建立二者间的相互关系,对研究特定目标区域分布、地物光学特征以及系统波形精细化处理等方面具有重要的研究价值。实验区域内,iGreena系统所得全波形回波信号整体完整,且信号噪声得到了较好的抑制,不同信号回波信号变化特征明显。 2 K$ P8 r8 e5 G8 T {9 d
(2)回波信号的多级放大处理 ! @% B- y" P# p( [8 n
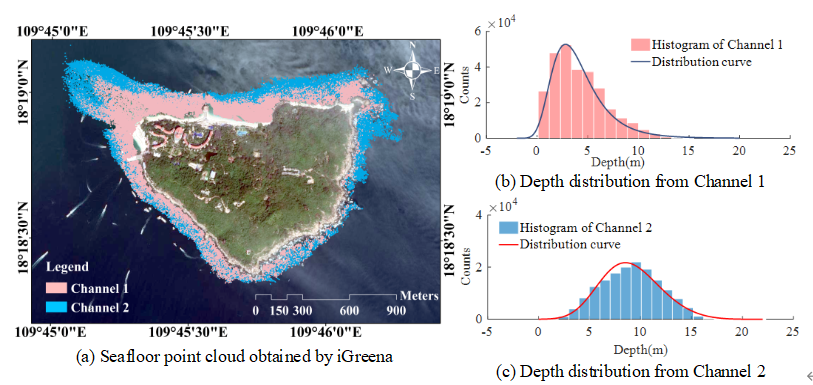
. e3 {! p, D4 q2 q* r% ]( f 图 9.信号多级放大方法对系统测深能力的提升效果
Q6 p2 y4 [0 n7 L8 { 采用信号多级放大技术的接收系统,可对水下信号进行进一步放大,通过采用针对本系统的回波信号处理方法,从而增强系统水下探测能力。上图显示了采用信号多级放大方法后系统在蜈支洲岛周边水域探测中不同放大通道所得的水底有效回波的空间分布及其瞬时水深统计结果,可以明显看出信号放大对系统测深能力的提升效果。
# d k/ S% N0 y; p6 R (3) 点云解算与水面波浪校正 ! p7 S! c& P3 X3 _' X: r, y
机载测深激光雷达可实现水陆目标的一体化探测,其中水下目标空间位置解算需考虑水体环境的动态变化与不同介质间传播对解算结果的影响。根据Snell定律,有如下关系: " q. k6 g6 X% s- b2 ~ b, E
 (1) (1)
- ~( J/ r7 p8 [& U, U! D) l
 (2) (2)
- Q" ? E; S% x+ P2 z1 j( @( v 其中, 和 和 分别为波动状态下的入射角和折射角,n1和n2分别为激光在水体和空气中的折射率, v为激光在水中的传播速度,c为激光在空气中的传播速度。 分别为波动状态下的入射角和折射角,n1和n2分别为激光在水体和空气中的折射率, v为激光在水中的传播速度,c为激光在空气中的传播速度。
( r L. y6 l( D1 `! _ 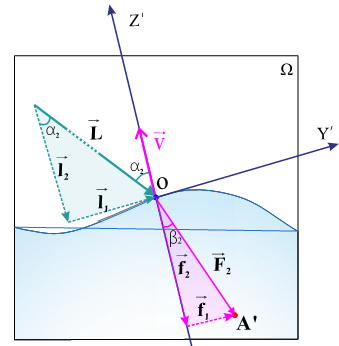
( P' e- O; H0 I5 @
图10. 激光在海面波动条件下的折射过程示意图 , A2 }- a* G# p
如通过波形处理得出水面反射与水底反射之间的时间间隔为t,经折射率改正后的对应斜矩为 ,根据图中的位置关系,二者的计算公式为: ,根据图中的位置关系,二者的计算公式为:
$ B( ~( S( Z' O  (3) (3)
S6 F' [! \. H5 P! a% v5 F: ~& v 设 ,则有如下关系: ,则有如下关系: 1 p% \) X1 l' G3 Y+ W) S5 R
 (4) (4)
. p9 ~% i' b% L" L- [" P
以上为水下激光点云解算模型,通过该模型计算可实现对水下回波目标位置的折射修正。
8 Q( o( K6 A2 t, m 激光在海水中的传播变化主要体现在对传播速度和传播方向的改变上。在海面波浪作用下,激光入射表面通常并非水平,且受到传播介质环境中散射以及反射面条件的影响,所得的点云也无法精确落在一个平面上[11],因此,利用局部波浪表面的点云数据,获取激光光束入射位置及其临近点,并在此基础上模拟出一个最小二乘意义上的切平面,使其反映激光入射位置区域内海面的倾斜特征,进而可实现波动水面激光入射方向校正。经本次实验采用[12]中方法进行波浪校正后,系统水深探测均方根误差减小0.12m。
4 h3 {; G/ c F3 W& n (4) 系统水下地形探测结果分析 5 u+ ?0 H) b6 o
为验证海面波浪的模型修正结果,采用中海达HD370全数字变频测深仪对试验区域进行了单波束测量,试验按照《海洋工程地形测量规范》对单波束的主测线与检查线之间的重合深度点进行了不符值比较[30]。两试验区的平均水深均在1~12m的范围内,交叉检验结果符合规范中对不符值限差0.3m的要求。
1 V) ]3 p1 @; R6 n 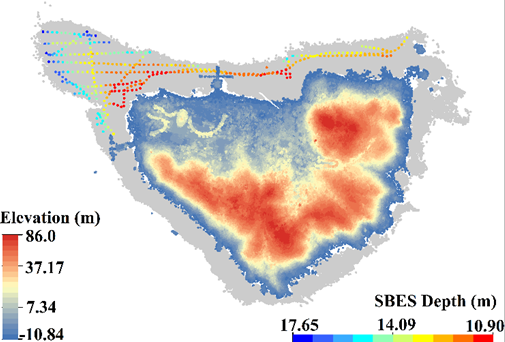
! R$ K2 E& l1 }5 Y3 u% S
图 11. 单波束测深点的水下分布
7 g! B% H8 O& M8 V 通过计算单波束测深点与激光点云所建立的表面模型之间的深度值之差作为激光点云对应位置与单波束测深点之间水深方向的偏差值,用以评估系统水深探测与数据处理效果。
- B l3 r2 P2 r/ y 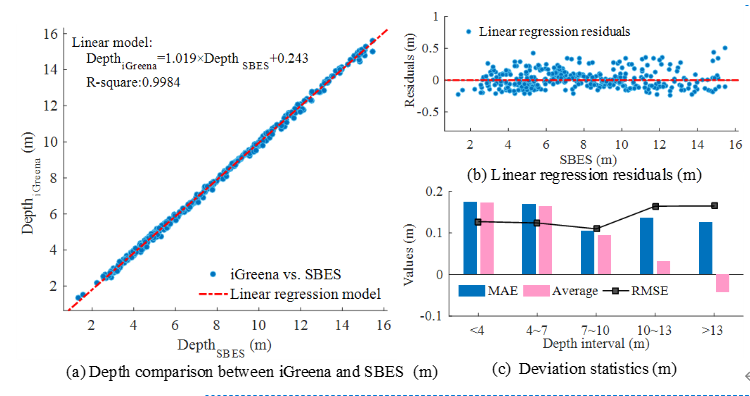
* E: n% R, j0 m2 m6 w" I) G
图 12. iGreena 水深探测与单波束测深结果对比
9 a6 _7 m: \( f P% i* k4 y' j 图中数据为系统经数据处理后所得水深值与对应位置单波束水深值,可以看出二者的符合程度较好,具有良好的一致性,不同深度的均方根误差小于0.17m
9 N; F: d+ S7 X2 Y0 B! Q 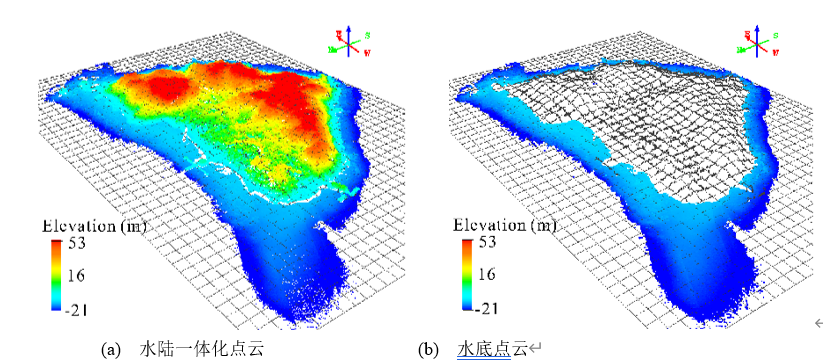
7 R" m9 V6 l4 | 图13. 蜈支洲岛及其周边水底点云数据
9 e8 d& a, F7 r4 S 通过点云分类可同时得到陆地与水下激光点云。在此基础上,可进一步得到精确的水陆数字地形产品,水深数据产品等。 9 r, N& g4 {" R+ v% r" N1 C
3. 总结
9 t2 j; L3 O6 U- s) D% s" M 基于深圳大学自主研制的机载测深激光雷达装备,从单波段机载测深激光雷达系统研制过程中存在的关键问题出发,详细分析了本系统各项技术难点与解决方案。实验获取了海南岛东部部分海岛及海岸带区域的水陆全覆盖地形数据,航线总长超200km。其中,蜈支洲及其周边水深20m,测试区域内所得最大瞬时水深约15.9m,区域测深能力约2倍Secchi深度。实用化飞行测试期间,系统保持6小时以上连续运行,系统各功能单元状态稳定,相关数据处理方法准确有效。飞行扫描实验验证了系统设计的可行性及其在实际作业环境条件下的适用性,目前该系统已具备了针对近岸区域水陆一体化探测的实用性要求。
* k2 C& V% J9 c3 [ 作为现代海洋测绘先进技术的集中体现,机载测深激光雷达系统的国产化研制以及针对复杂环境条件下的水陆一体化综合探测技术研究,对提高我国海岸带环境监测、海洋资源调查与利用水平具有重要的现实意义。随着我国沿海经济发展、环境保护以及国防建设实际需要,机载测深激光雷达轻量化与智能化研究将是该技术领域发展的重要方向。
2 P4 T6 }1 G5 A1 Z" l 本文图片来源及详细研究内容可参见学术论文: + u! n. z& O; x$ i; Z: \9 t e2 _
Kai Guo, Qingquan Li, Chisheng Wang, et al.Development of a single-wavelength airborne bathymetric LiDAR: system designand data processing[J]. ISPRS Journal of Photogrammetry and Remote Sensing , ]" _; {/ I! i1 h: @3 U7 ]* k% B4 G! W" g
全文链接:https://authors.elsevier.com/a/1eVGT3I9x1j8uS 1 [; ]6 X9 z" V1 {% \/ n2 c9 J# D3 N
参考文献
+ }( c$ t0 v& `, q( w) D2 \ [1]. 赵建虎, 王爱学. 精密海洋测量与数据处理技术及其应用进展[J]. 海洋测绘.2015(06):1-7. 1 W, W' g2 A! P5 v/ X
[2]. 刘焱雄, 郭锴, 何秀凤, 徐文学, 冯义楷. 机载激光测深技术及其研究进展[J]. 武汉大学学报(信息科学版). 2017(09):1185-1194.
( O y% B! N+ }; G V9 Z [3]. Liu Xin, Tulldahl H., Axelsson Andreas. An Overviewof the Airborne Bathymetric LiDAR Reflectance Data Processing[J]. Proceedingsof SPIE - The International Society for Optical Engineering. 2011:7. ?* ?, H; `8 d
[4]. Chisheng Wang,Qingquan Li,Yanxiong Liu,Guofeng Wu,Peng Liu,Xiaoli Ding . A comparison of waveform processing algorithms for single-wavelengthLiDAR bathymetry[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015,101:22-35. , \2 n r2 t# A$ U& y- a% z( U
[5]. Chisheng Wang,Qiqi Shu,XinyuWang,BoGuo,PengLiu,QingquanLi. A randomforest classifier based on pixel comparison features for urban LiDAR data[J].ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 148(FEB.):75-86. ' u+ |7 ?1 _0 q3 s+ n
[6]. 郭锴,刘焱雄,徐文学,何秀凤,张子引,刘海涛.机载激光测深波形分解中LM与EM参数优化方法比较[J].测绘学报,2020,49(01):117-131. 6 U* H Q6 _; s6 x' Y" {
[7]. Bufton J. L., Hoge F. E., Swift R. N.Airborne measurements of laser backscatter from the ocean surface[J]. Appliedoptics. 1983,22(17):2603-2618.
# q* u0 ]0 F3 X2 V! G: t [8]. Doneus Michael, Doneus Nives, BrieseChristian, Pregesbauer Michael, Mandlburger Gottfried, Verhoeven Geert.Airborne Laser Bathymetry – detecting and recording submerged archaeologicalsites from the air[J]. Journal of Archaeological Science. 2012,40:2136-2151. 4 e5 l, ]9 Q8 a6 u1 G
[9]. Jeff, Lillycrop, John, R., Banic.Advancements in the U.S. army corps of engineers hydrographic surveycapabilities: The SHOALS system[J]. Marine Geodesy. 1992. 9 n' ^/ ^6 _$ R5 j. d. f, ^3 [
[10].Tuell Grady, Barbor Kenneth, WozencraftJennifer. Overview of the coastal zone mapping and imaging lidar (CZMIL): a newmultisensor airborne mapping system for the U.S. Army Corps of Engineers[J].Proceedings of Spie the International Society for Optical Engineering.2010,7695.
I; S Z9 u# z: B( s P Y- @ [11]. Wenxue Xu, Kai Guo, Yanxiong Liu, et al. Refraction error correctionof Airborne LiDAR Bathymetry data considering sea surface waves [J].International Journal of Applied Earth Observation and Geoinformation, 102. 4 w# U! |8 c7 M1 }
[12].Guo Kai, Xu Wenxue, Liu Yanxiong, He Xiufeng,Tian Ziwen. Gaussian Half-Wavelength Progressive Decomposition Method forWaveform Processing of Airborne Laser Bathymetry[J]. Remote Sensing. 2017(1).
, v$ Z0 k: `1 Q) ^+ e [13].GB/T 17501-2017, 海洋工程地形测量规范[S].1998. 4 [, K, q2 \2 x& S
作者相关信息:
. Y' q4 h" B! U( `' n 深圳大学机载测深激光雷达课题组 % o& F! T( H1 Y$ e
姓名
5 e, Q! `9 w% p; ^6 B7 d 学位
5 V0 w& J/ h* F5 Q& ~9 J' L$ l 职称/职务 $ q- W3 y7 J$ X4 k
任务分工
5 P& R# T: z1 Z0 W: k' J 李清泉 5 V7 Z: n `; D+ T1 V+ q5 \0 R
博士
; N; Y$ f. g: y9 k 教授
4 P( H: J- M1 x* e0 X5 }( n' R 团队总体负责,系统设计与多传感器集成 7 z. ^( U0 f6 b" O3 k
毛庆洲 7 Z( a; x T; V( @
博士 6 f8 i ?. R+ k Y
教授 " @$ O3 q! G: y, f& D& J. L5 O6 Q
激光雷达装备总设计 9 C$ X$ I4 b* ]8 \/ ^/ _# a6 R- R
朱家松
2 ~" r8 f' d) ~ 博士 / D, i9 x4 ?. e, W( @
教授 ) `& ~1 w+ b3 d x' \* e& \
海岸带工程应用
& V; O2 ^) W& d1 P) D 张德津 - d: k) q: O, J- D+ D9 Y
博士 1 L3 i6 ~( e9 }: _9 f
教授
0 D. \5 V% a5 E* V 海岸带工程应用
q7 n, d E5 `, ~- M+ o, f 汪驰升
6 i5 W% I7 H5 A( P5 |- K 博士 8 u) p' T) H/ V1 z$ k: M
副教授 ' u2 P5 H8 f1 I/ z! L. {4 X
激光信号处理与数据分析
; ?5 ]: q3 O$ m- @4 s2 D. Y 郭锴
5 d, w* K6 d+ k3 [ 博士
4 z+ r5 m, ^& s2 y7 k$ J6 h 博士后/技术骨干
' ^% B: k' w& s! d7 A7 V, B 激光信号处理与数据分析
6 v4 q$ I# {' g% j6 N8 E0 G7 y- @ 吴安磊
$ }7 C2 C! L3 i5 a' N; F$ v3 u: N 硕士 " I e; t0 R% n( J8 Q* [5 h
技术骨干 * @8 I- W" b2 q7 H) j( p7 o
多传感器系统集成
* S5 z& w& @+ h6 I 课题组负责人 % m2 p- l; z& {9 i1 Y
李清泉:博士,二级教授,博士生导师,动态精密工程测量专家,国际欧亚科学院院士,深圳大学校长。中国测绘学会副理事长,中国地理信息产业协会副理事长。自然资源部大湾区地理环境监测重点实验室主任。 " G* J1 b6 U7 A% f5 }! S# I
李清泉教授长期从事精密工程测量的多传感器集成与同步控制、测量新技术、测量数据处理新方法研究。
8 M* F S1 k+ F( C* c0 P 技术负责人 $ I! M1 s# Q( Z0 \5 z/ B9 m
毛庆洲:博士,教授、博士生导师。 ; |3 m: J/ a i4 ~7 e
长期从事3S集成与多传感器集成等理论与技术研究,致力于“光、机、电、算”与测绘技术的融合,研制自主知识产权的三维激光扫描仪和移动测量和道路检测系统等新型测绘装备,并在道路交通、高速铁路及测绘领域得到规模化应用。 # Q% u# X3 u2 f) U; w3 U
联系人
$ \) E3 J' T: g! [) a" u/ R: e 汪驰升:博士,副教授,主要从事雷达测量、众源摄影测量、灾害与城市应用等相关理论与技术研究 # o( ~1 H. J5 I6 }, h* f2 W
本文作者: 2 U" a$ L, b& x9 M
郭锴:博士,深圳大学博士后,主要从事机载激光雷达系统集成、激光水下探测技术及其数据处理。 / q* z4 t. j8 f# n: B3 h2 O& `) y1 p
Email : guokai@szu.edu.cn电话:15712773277 0 O* e' `- C. B) z
点击文末“阅读原文”即可查看原文章。  fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) % P* g* [2 r$ `& z
% P* g* [2 r$ `& z
7 h. ?9 G- x. e 投稿、转载、商务等合作请联系
9 J# R' K: n1 L- k% k1 @ 微信号:huitiandi321 : V9 @% V3 {' A5 D
; }& V- n) E! [# D 邮箱:geomaticshtd@163.com 往期精彩推荐+ f+ Y# l! H1 k+ f( m4 c
“活”登春晚、刷屏设计圈 | 中国五大传世名画全景解析! 8 t S, w! ?0 N6 h) Y
40万+!福州大学诚邀您加盟博新计划! 8 R ~5 D k: i. a
现代摄影测量学之父 阿克曼教授 ) N; I" p8 d1 M' e1 b u: Y! \
《慧天地》敬告
; g4 @* a6 ^) ~( t: c 《慧天地》公众号聚焦国内外时空信息科技前沿、行业发展动态、跨界融合趋势,探索企业核心竞争力,传播测绘地理信息文化,为时空信息类相关专业学子提供日常学习、考研就业一站式服务,致力于打造政产学研金服用精准对接的平台。 W- t1 _, H, D S0 U0 J7 q3 v
《慧天地》借鉴《读者》的办刊理念,力争把时空信息领域的精华内容汇聚到平台上。我们高度重视版权,对于精选的每一篇推文,都会在文章开头显著注明出处,以表达对作者和推文引用平台版权的充分尊重和感谢;对于来源于网络作者不明的优质作品,转载时如出现侵权,请后台留言,我们会及时删除。感谢大家一直以来对《慧天地》的关注和支持! ——《慧天地》运营团队
编辑:张希希 审核:欧雅玟 张自轩指导:万剑华教授
4 ]% [3 _9 W" J# i6 v# a0 n' `% m2 j0 @
& F7 O: e. t! f
# G4 G" y7 S* J& v$ h5 N7 k
. ^% ]) S' s+ d. F0 n" f | 

