|
! ~6 t+ d- z, ], `& v. y
海洋勘测分为海洋测绘和海洋工程勘察两类。海洋测绘是研究海洋、江河、湖泊以及毗邻陆地区域各种几何、物理、人文等地理空间信息采集、处理、表示、管理和应用的科学与技术,以海洋水体和海底为对象所进行的测量和海图编制理论与方法的学科。海洋测绘是一切水域活动的先导,具有国际性、全局性和基础性等特征,不仅为航行安全和军事行动提供保障,也为开展地球形状、海底地质构造运动和海洋环境等科学研究,以及开展海洋资源开发和实施海洋工程建设提供基础资料。 - u9 c" N$ |1 Y0 K4 V" g% o. o
6 O9 D' v' v9 Z* O6 q 海洋工程勘察主要包括海洋工程测量、海洋岩土勘察和海洋工程环境调查三个分专业。 0 r" r+ W8 A9 z: I
海洋工程测量包括海底地形测量、海底面状况侧扫和底床稳定性分析; 0 O' z3 N9 ?$ G k* c# Y4 x1 O! K
海洋岩土勘察包括海底近表层沉积地层结构探测、海底岩土的工程(物理、力学)性质等; ; \* f2 a8 _# G" V; m" h0 C
海洋工程环境调查包括物理、动力及防腐蚀环境的调查。海洋工程勘察具有学科综合性和高科技性的特点。
: H+ U- G) w; J7 X 
# V; b. s ?2 {7 l, ^ 1.海洋定位与导航 8 t) |6 q9 l5 [$ n
借助光学、卫星、声学、多普勒、惯导等定位技术,测量固定标志或水面、水下运动载体(船只或水下潜航器)的地理位置,为固定目标提供位置,为运动载体提供位置和导航服务的工作。光学、卫星、多普勒、惯导等技术适用于水面目标的定位与导航,声学、多普勒、惯导等技术适用于水下目标的定位于导航。包括获取基本的距离和角度观测信息、位置计算、位置滤波等内容。 $ ~7 T* I' z/ R& f" L P

$ j! h6 G. N' C6 I- t 2.海洋重力测量 9 w j. ]( k2 H6 [9 D
借助重力仪或重力梯度仪,采用定点或移动方式在海洋区域测量重力加速度,获取海洋绝对重力或重力异常变化分布图的工作。包括测量前准备、重力测量、重力数据处理、重力测线网平差、海洋重力或重力异常图绘制等内容。
* t' Z) i9 f; n7 D5 Z. x7 x 在地球物理勘探中,由于岩石和矿石密度的不同所引起的重力场的变化,可用来寻找矿藏和了解地质构造;在地球物理学中,可以利用重力测量的数据去测定地球的弹性、密度及地壳的构造;在大地测量学中,要用重力数据去归算观测成果和研究地球形状;在导弹与航天技术中,重力测量资料可为空间飞行器的轨道计算和惯性导航服务,提高远程导弹的命中率。
6 y* U5 q( m; p$ M 3.海洋磁力测量 $ ~( u6 U/ o& `% m5 v: O
采用磁力仪或磁力梯度仪测量海上磁场总强度、磁异常和磁偏角等地磁要素,获取海洋绝对磁力或磁异常变化分布图的工作。包括测量前准备、磁力测量、磁力数据处理和磁力或磁异常分布图绘制等内容。 - o; w$ h r' R. Q8 v4 h' O
海洋磁力测量成果有多方面的用途。 ) I+ ?) T i, f+ {, r
首先,对磁异常的分析,有助于阐明区域地质特征,如断裂带展布、火山岩体的位置等。磁力测量的详细成果,可用于编制海底地质图。世界各大洋地区内的磁异常,都呈条带状分布于大洋中脊两侧,由此可以研究大洋盆地的形成和演化历史。也是研究海底扩张和板块构造的资料。
* R) U6 t$ B8 s6 [& L 第二,磁力测量是寻找铁磁性矿物的重要手段。
, z7 H. C$ X7 _& S0 L 第三,在海道测量中,可用于扫测沉船等铁质航行障碍物,探测海底管道和电缆等。 + H$ i+ `+ q* p; \8 e' h) f
因此,越来越多的国家都把海洋磁力测量作为海洋测量的重要内容,把海洋地磁图作为海洋区域的基本海图之一。 0 w& `. F& e7 B: J! M2 P1 w
4.海洋控制网测量 & J' |5 R0 U& }6 {! ^ F
海洋控制网是陆地控制网向海洋的延伸,由海岸、岛礁、海底等控制点组成,是为海洋科研研究、海洋工程等海洋活动提供绝对空间参考的工作。海洋控制网测量借助GNSS、光学、声学等测量技术,获取沿海岸、岛礁和海底控制点三维绝对坐标的工作。包括绝对基准引入、控制点基线联测、水准测量、水深测量等工作;海岸带和岛礁控制网测量主要包括GNSS控制网测量及网平差、水准测量及网平差等工作;海底控制网测量主要包括绝对基准传递、海底基线测量、水深测量以及网平差等工作。
' ]- f, K+ }0 y. }& i 5.海洋测深
0 S: c6 K* h4 |$ @ 一般分为直接测量和间接测量两种:前者是用测深杆、测锤和测深绞车等直接测量水深;后者则利用水的压力、温度和声速等物理性质(如静水压法、温度测深、回声测深等)间接推算水深。由于潮汐涨落、海平面经常变化,精确的水深测量必须以数处海平面为基准并进行潮汐校正。常用的有回声测深仪,而专用的则有多波束回声测深仪。包括测前准备、水深测量、定位、声速测量、测深数据综合处理等内容。
; }2 j$ D* v) R4 Z4 i# b+ {( T 主要用于海底地形地貌测量、碍航物探测、通航水深测定、航道疏浚与清淤和水深图绘制等工程,在施工设计、通航保障和科学研究领域应用十分广泛。 : L2 [9 {- M7 o) t6 z7 n
) z" j6 b, k% Q( A
6.潮位观测
: c8 i8 V( c7 _ 通常称为水位观测,又称验潮。按照观测时间长短,潮位观测又分为长期验潮、短期验潮、临时验潮。潮位观测是按照一定的时间间隔,读取潮位在某垂直基准面(零点基面、深度基准面、平均海平面、高程基面)下的高度,形成潮位序列。验潮的目的是为了解当地的潮汐性质,应用所获得的潮汐观测资料,来计算该地区的潮汐调和常数、平均海平面、深度基准面、潮汐预报以及提供测量不同时刻的水位改正数等,供给有关军事、交通、水产、盐业、测绘等部门使用。潮汐观测是海洋工程测量、航道测量等工作的重要组成部分。包括设备检校、潮位观测、潮位数据序列质量控制、潮位曲线图绘制等内容。
& V* k2 s& t, G( n- E5 H( @2 ] 7.海洋水文测量
# M: h5 i+ {& i! @- K/ o 在海洋的某一点或断面上观测海流、潮流、潮汐、波浪、盐度、密度、温度以及气象等水文要素,并对观测资料进行分析和整理的工作。海洋水文观测为编辑出版航海图、海洋水文气象预报、海洋工程的设计与建筑以及海洋科学研究提供资料,是海洋调查中重要的作业内容。包括设备检测、水文要素观测、水文要素处理和诸要素图绘制等内容。 ) h$ l3 \: O0 g D: L w
海流测定的测量结果可绘成海流矢量图,并进行海流准调和分析,为掌握海流变化规律,对海流进行科学预测有重大意义。可主要用于码头等海上构建物方位轴线确定,海洋污染物扩散分析,海洋地形冲淤规律的分析,船舶的航行安全等。 / k- p3 x8 r4 M
8.海洋遥感测量
3 O% U, M4 z. u 将海洋及海岸带作为监测对象,采用各种主动或被动式传感器对其进行远距离非接触观测,以电磁波或声波为信息载体,接收并记录海洋的辐射、反射信息,再经过传输、加工和处理,获取海洋景观和海洋要素的图像或数据资料的一项工作。具有信号弱、干扰强、大面积同步连续观测及高分辨率和可重复性的特点,其中微波遥感还能进行全天候观测。按照测量对象,海洋遥感测量可分为海面遥感测量和水下声学遥感测量。包括遥感信息获取、处理、海洋资料的反演和信息管理、分析及应用等内容。
9 {# O# A Y1 V7 C: o* Y% d; c/ h 主要应用于调查和监测大洋环流、近岸海流、海冰、海洋表层流场、港湾水质、近岸工程、围垦、悬浮沙、浅滩地形、沿海表面叶绿素浓度等海洋水文、气象、生物、物理及海水动力、海洋污染、近岸工程等方面。近年来对于海岸带及海岛的遥感尤为活跃,它可以提供跟踪大尺度洋流、中尺度涡流实时调查信息 (包括风浪场的准确信息)、海面上空的云图和风暴潮及台风信息、海洋初级生产力和海洋生物环境方面的信息、有关重力场、海平面、大地水准面等海面地形的测高资料及快速大尺度监测和区分海面溢油及其它海面污染的方法与图像等方面信息。
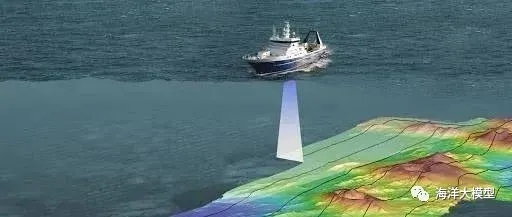
3 b- ?: H. n T/ l/ p: E# Q 9.海底地形测量 9 U% U; J3 H/ ^2 d* b! |" f: }( o. i
海底地形测量通常由安装在船上的回声测深仪和侧扫声呐同时测定水深和水下地物大小和位置,也可采用多波束回声测深系统、海底摄影测量、机载激光测深和海洋遥感测深等方法。根据距海岸的远近,各测点的定位可采用光学定位、无线电定位、水声定位、卫星定位和组合定位等方法.在利用潜水船进行海底地形测量时,可采用惯性定位或利用海底控制点定位.其中以多波束回声测深系统与组合卫星定位系统相配合,由计算机实时处理绘出海底三维图形的方法发展最快。海底地形图在坐标系统、基准点、分幅、比例尺等方面应统一规定,并与同地区的陆地地形图相一致,以利于海、陆图的衔接使用。
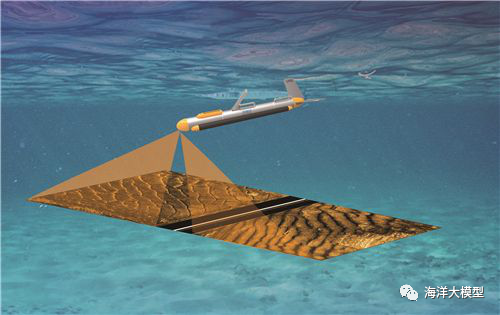
: X' E) |, _% p) J( @ 10.声呐扫海测量 0 Z a% t+ l$ B2 V; L6 h
是借助多波束声纳、侧扫声纳、合成孔径声呐等水下声学遥感测量技术和识别,根据测量要求,采用一定测量方法,获取海底回波强度,构建海底回波图像,反映海底纹理特征、地貌形态与底质变化,获取海底底质类型分布及水下障碍物等地貌信息。包括测量前准备、海底地貌测量、定位、图像处理、海底纹理和地貌形态特征提取、底质声学分类等内容。 - H3 r3 t9 F% @
用于海底表层底质分类与分析、海底矿产资源勘查、海洋工程建设、航道锚地建设、水运工程整治等方面,同时由于分辨率高的优点,也常用于海底目标探测、海底管道路由调查、海底地貌形态分析等方面。
0 R- e' ?; i% ~; U 11.岸线测量
' o9 j: Z( p$ \' G( v& z 又称岸线地形测量,是通过人工实地调查、卫星遥感、机载激光扫描及倾斜摄影测量等手段以确定海岸线位置和海岸性质、沿海陆地地形、沿海陆地上的航行目标和其他要素为目的的测量工作。海岸线没有统一定义,其形态复杂多变,具有时空变化特点。包括海岸带地形测量、平均大潮高潮面确定、岸线确定等内容。 6 O$ D8 M9 i" A7 J Y" t
岸线测量与航海、海洋保护及利用、海域使用、海洋执法、国防建设、自然资源调查、海域确权登记等活动密切相关,是海岸带综合管理的重要基础数据。 3 Y" W4 s+ z6 K7 ]% ^; c) g$ G
12.浅地层剖面测量
5 w( e+ C! R, Q 借助浅地层剖面仪、单道或多道地形,以连续走航方式对海底浅部地层进行声学测量,获取时序回波强度或相位信息,并借助时序回波图像,反映浅地层结构及底质分布状况。包括测量前准备、浅地层剖面测量、回波强度数据处理、浅地层剖面层位划分等内容。 - e6 Y# y" T! x# J
海洋科学方面,浅地层数据能用于海洋沉积层形成、演变分析,海底物质迁移分析等;海洋工程方面,浅地层数据能用于航道疏浚、海底矿产资源勘查、海洋钻井平台建设等,在海底埋藏目标探测、海底管道路由调查等方面也有着极大的应用价值。 7 g l4 ^! \' r- c$ [& D
浅地层剖面探测结果受多种因素制约,如仪器本身的技术性能指标,海底底质特征,探测过程中的噪声及其压制,其他各种干扰,以及解译者的实际水平、经验等。其中绝大多数是可以改良甚至是避免的,因此,在实际探测过程中,应根据具体情况,综合实际因素施测,以达到最优的探测效果。
; H. L6 u1 O' Y# K$ F% l$ e ⒈海底底质 / e* \) L1 ^, n5 K* R
海底地质构造状况,尤其是海底底质类型特性决定仪器所能勘测的深度范围。海底底质是砂、岩石、珊瑚礁和贝壳等硬质海底严重制约声波穿透深度,限制仪器勘探的深度。例如,浅地层剖面探测深度砂质海底小于30m,泥质海底可达100多m,两者存在巨大的差异。 6 B/ y. \' o E8 k
⒉噪声
2 X' o! _9 f* R, d) L* h 处于系统带宽范围内的外界声源信号都可能串入造成干扰信号图像,包括低频船只机械噪声和环境噪声等。噪音在浅地层剖面记录上可能都会或多或少地显示出来,降低勘测数据质量,甚至对判读、解译结果产生重大的影响。因此,正确地识别,甚至消除噪声的影响是十分重要的。
1 T' [# b! _* x! N0 K ⒊船只摆动
! v) r- m7 [7 O- | 为获得具有良好效果的浅地层剖面探测数据资料,调查船走航过程中应尽量保持均速慢速稳定行驶,船速和航向不稳定造成船只摇摆,使拖鱼不能保持平稳状态,造成图像效果不佳。同时,涌浪也可使船只摇摆,致使拖鱼不定。
* |2 u2 a! G: t9 |( ]' X 其他影响因素还包括海气界面,海气界面能将发射声能几乎全部反射,几乎无发射声波触及目标。如果采用船尾拖曳换能器,船的尾流对地层反射信号也能产生干扰,施测过程中应该使换能器尽量避开船的尾流区,通常采取使换能器入水深度加深,或者加长拖缆的方法。另外,海水深度、潮汐作用及海底起伏均对浅地层剖面探测有着直接的影响。 1 R/ a4 u# q' e4 {, R0 K
13.海洋工程测量
) g0 h, F+ j' N4 E. ]6 ~9 o0 ^% } 为满足海洋工程勘测设计、施工兴建和运营管理不同阶段工程需求,开展控制测量、水深测量、底质探测、水文观测、地图编绘及变形观测等基础测绘工作,保障工程按设计施工、竣工和进行有效的管理。包括需求分析、多海洋要素组合测量、数据处理、施工测量参数的获取及时序变化曲线的绘制等内容。 0 ]/ k5 |9 [1 W u
可应用于海港工程、堤坝工程、海底管道工程、隧道工程、跨海大桥工程、疏浚工程、救捞工程、海洋划界工程、海洋石油工程、登陆与抗登陆场区工程,以及采矿、能源、海洋资源综合利用,和风电场区的勘测与运维工程等。
. Q" j/ ?- e2 A0 C5 U, I 14.单道地震测量 ; ]7 D7 F" \+ \; L% [; f: R# l
单道地震勘察是采用单道地震仪采集地震波信息,并进行数据处理、分析,以获取海底地质数据,反映海底地层结构、性质的一种勘察方式。主要分海上反射地震法和单道连续剖面法,海上反射地震法采用自激自收的采集方式进行。勘察系统按功能可分为震源系统、接收系统和数据采集系统,按布局可分为拖拽和船载两部分,其中拖曳部分包括换能器、水听器和电缆,船载部分包括可控震源、数据采集和数据处理平台、DGPS差分卫星导航定位系统。勘察系统利用不同介质具有不同信号发射波的特点来获取海底地质数据,用于探测海底水深小于1000米的中、浅部地层的地层层序和地质构造。单道连续剖面法利用接近垂直入射的声波,由于在沉积物横切面的声学阻抗特性差异而产生不同反射波的特点,分析研究海底沉积物地层构造。包括测前准备、仪器设备安装、测线布置、船载系统及拖拽系统定位、数据采集、数据处理及综合分析等内容。
3 {5 m! M! F- s4 ~8 t0 P8 ~# X 15.海图制图 ! q2 Y# I5 Y! O1 ]& B! k
将海上实测成果及其毗邻陆地的自然和社会经济现象以图形图像方式模拟并传递给用图者的工作。根据海图的用途和要求,制作成各种海图产品。其六大要素为:海岸,海底地貌,航行障碍物,助航标志,水文及各种界线。包括编辑准备、原图编绘和出版准备三个阶段的内容。 * w, I: c& J, S# U" {$ Y. w+ I$ u
根据不同用户需求,综合利用海上实测成果、现有海图和其他制图资料,制作成可用于分发、显示、阅读、标识和计算的成品海图,以供航行船舶测定方位、标绘航线、识别碍航物,供海事等有关部门实施监管服务、测绘和救助打捞等业务,为舰船航行安全、海上军用和民用工程建设以及海洋科学研究提供准确可靠的海图产品。 * C+ k7 T$ ^* c6 O
来源:海洋大模型
7 m R2 k: a# \) ]! h* U$ r. G6 I( M/ a$ h
V( I0 r+ O2 y' S
0 O" U7 j. x8 y7 ?
# M: T* Y2 F* r+ z& g
| 

