 点击上方“溪流之海洋人生”即可订阅哦 点击上方“溪流之海洋人生”即可订阅哦乔正明1,郭晓明1,商少平2,刘轲2,赵小峰3 - n0 T/ _+ _8 L$ x
1.国家海洋技术中心漳州基地筹建办公室;2.厦门大学海洋与地球学院; % e$ V0 z0 h5 R# b' {& N8 B3 H8 _
3.国防科技大学气象海洋学院
" a6 C) N: a8 C( b$ P0 T0 U 【摘要】为满足当前ADCP计量检定的迫切需求,根据ADCP在水池拖车试验检定时换能器发射声波的主瓣、旁瓣与检定水池池壁、池底形成的几何关系,推导出了抑制旁瓣、不抑制旁瓣时检定水池的尺寸需求。以市场占有率最高的ADCP产品为研究对象,计算得出了不同工作频率ADCP对检定水池宽度和深度的理论值。本文导出的公式,进一步完善了ADCP计量检定的理论基础,为ADCP在室内可控环境下的检定规范制定及检定平台设施建设提供参考与借鉴。
. U2 F2 d- u0 p- j% V: c 【关键词】ADCP检定;水池拖车试验;池体计算;换能器;旁瓣影响 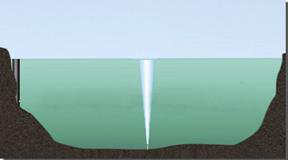  & s6 m1 z9 |! o4 ] & s6 m1 z9 |! o4 ]
一、引言  U$ X6 U" f9 j' l/ c- ] U$ X6 U" f9 j' l/ c- ]
声学多普勒流速剖面仪(Acoustic Doppler Current Profiler,ADCP),是目前国际上测量多层剖面海流及河道流量的最有效设备[1],广泛应用于海洋调查和水文监测领域。尽管近年来ADCP发展迅速且应用广泛,但国内外对其检定还处于起步阶段,目前行业内尚无被广泛认可的ADCP检定校准或相关规范[2]。 # `: k: n4 m: s6 K1 f
目前,ADCP流速流向检测检定方法主要有水池拖车、同步比测和自身航行试验[3]。经前人试验验证,在室内可控环境下的水池拖车试验是目前检定ADCP最可靠最有效的方法之一[2,4-6]。2010年颁布实施的国家标准《GB/T 24558-2009 声学多普勒流速剖面仪》[3](下文简称国标)规定:工作频率大于300kHz的ADCP应进行水池拖车试验,且水池长度应大于100m,宽度大于7m,深度大于4.5m。国际上,对中高频ADCP(500kHz以上)水池拖车试验所用水池宽度都在15m以上[7]。综合国内外的各项标准及应用可见,均未给出不同频率ADCP检定所需水池物理尺寸上的最佳值。
) P7 [4 [% `4 j5 c" N, i4 { 本文参照国外相关研究,以NOAA等相关机构提出的检定方案[8]为基础,以RDI公司3000m型Workhorse Long Ranger 75kHz(下文简称WHLR-75K)ADCP产品为研究对象,针对ADCP水池拖车试验中所需水池的深度和宽度需求提出了新的计算方法,进一步完善了ADCP计量检定的理论基础,为今后ADCP在室内可控环境下的水池拖车试验检定规范制定及检定平台设施建设提供参考与借鉴。
9 }% j2 i( U9 E8 B( b 二、ADCP简介 & n1 n9 K& p* _( W9 j
ADCP由换能器阵、温度传感器、罗经、倾斜传感器、壳体及应用软件等组成,一般分为自容式、直读式、船用式(走航式)[3]。为测量三维流速,ADCP一般配置2个以上不同方向且彼此独立的声学换能器,最典型的4种换能器阵型结构:3波速Convex结构、4波束Cyclops结构、4波束Janus结构和5波束Janus结构[9]。每个换能器都与ADCP的轴线成一定夹角,且都具有发射和接收功能,工作时换能器发射声脉冲波信号,通过随水体流动的泥沙颗粒、浮游生物等散射体反射声波信号,由换能器接受反射的声波信号,经测定其多普勒频移而计算出不同层深的水体流速矢量[9]。ADCP具有不扰动流场、测验用时短、测速范围大等特点。 ! a; K$ `/ R& u
WHLR-75K ADCP为4波束Janus结构,相邻换能器法线间夹角90°,每个换能器法线与ADCP纵轴夹角20°,是一款用于长期、大量程海流观测的产品,其采集的年度或季度的详细海流数据,主要用于环境监测浮标或潜标、海上石油钻井平台监测、极地或大洋锚系观测等海洋科学研究或海洋油气区海流观测。
9 V" B' L: |$ x. I5 l/ f 三、水池拖车试验
& H! h9 A/ ?( C) a ⒈试验原理
3 n, `3 G( b& j 水池拖车试验主要由大型水池、运动拖车、拖车车速测量设备、ADCP安装架、回转机构、测量数据同步采集处理装置和被测ADCP仪器等组成[3,10]。试验时将ADCP固定在拖车上,并向水体中播撒石灰粉粉末等颗粒物作为水中散射体,采用水静止而ADCP运动的方式形成ADCP与水的相对运动,以ADCP自身的运动速度值检验其流速测量值,以ADCP在其自身坐标系上的运动方向值检验其流向测量值[3,10]。
) J" g, `6 m: ~& X5 ~ ⒉试验水池建设要求
" P8 ~, `- ]8 [7 l _# u' f 由声学特性可知,ADCP的工作频率越低,在进行计量检定时要求水池长度、宽度和深度就越大。检定水池需满足以下条件:一是水池要足够长,否则在检定过程中,ADCP运动的速度还没有达到稳定或还未获取足够的采样数据就已到达水池端头;二是水池要足够深,不同型号ADCP的盲区大小各不相同,水池深度至少要大于盲区,且在声波信号到达池底前,应获取至少2个完整且质量较好的深度单元流速数据;三是水池要足够宽,须充分考虑池壁对旁瓣的影响[2]。 $ X5 m7 B$ x* C+ E1 C
四、试验水池的物理尺寸计算
6 ?1 Y0 j! M. D- G& x" ]; i+ I ⒈水池长度分析 : ], }$ _: w& I! I
水池长度分析分为两个部分:一是根据具体试验需求计算水池长度;二是通过任务量分析选取合适的水池长度。 : z5 }% }% T0 l9 n8 w. n" H
⑴以具体试验需求计算水池长度
. T( t$ i2 B, V( ~: B7 _ 参考NOAA及RDI公司的检测检定方案,水池长度的测算公式为:
6 J* A! B- r8 z ? 水池长度=加速段长+稳定段长+采样段长+制动段长+安全段长
, k/ g8 G( c' U" q& i7 L! i+ z 其中:
) l @7 w+ m& P 加速段长=拖车加速到采样段速度所走长度; " a$ q( W5 |: E$ x) w
稳定段长=拖车采样段速度×稳定时间; 8 U( Y3 X/ P- k, ]6 C
采样段长=拖车采样段速度×采样时间;
( I0 M% [* g L e2 P 制动段长=拖车减速至零所走长度; * a/ H0 V# x" N6 V4 E0 w4 E1 {
安全段长=一般设置拖车滑道和液气缓冲装置,可按20m选取; 7 V( q' N: i4 ]( g0 R: l* U# ?+ e
采样时间=采样剖面数目×每个剖面脉冲数目/采样频率;
) o) w) P6 B( N 各参数取值: # D1 m/ ~3 V1 W) u6 M
拖车采样段速度:国标规定检定流速的最大值为4m/s[3]。 & v" G. q: N4 ?) v
拖车加速和制动的加速度:0.65m/s2(根据目前拖车试验时所能实现的理想加速度);
& V. B2 d k* }6 i; \ 到达采样速度后的稳定时间:2s(根据实际检定情况具体确定);
/ ^! t& ~/ D4 L- r, U6 f9 H1 S+ B 每个剖面脉冲数:为保证检定精度一般设为10个[3];
& [7 g6 |$ N2 D$ R# B( [ 采样剖面数:每个拖曳速度至少应有30个剖面流速测量值,国标允许多次重复拖曳来完成30个流速测量值[3]; - H; b" y8 N1 G
采样频率:1Hz(以RDI公司WHLR-75K ADCP为例)。
; f) @& V7 n6 e3 }; B 因ADCP的工作频率越低,最大采样频率越低,对水池长度要求也就越大。按上述计算方法,若要满足30个剖面流速测采样的检定要求,在拖曳速度分别为1m/s、2m/s、3m/s、4m/s时,对应水池长度应分别不小于324m、631m、940m、1253m(见表1)。
: |0 C% c5 z S# N$ s. D( L 表1 不同拖车速度对应水池长度计算表
& }$ B1 r9 k) R: z4 i0 H 拖车速度(m/s) 6 |: M( c, ~. r- K" \1 B
加速段长(m) ! P1 X( Z* q& s) g
稳定段长(m)
: r; e9 P( N; I9 x: Y 采样段长(m) . H: {6 A; p4 g6 D2 }0 s
制动段长(m)
' a: T5 {7 }( v3 r1 B4 Y' U; t 安全段长(m) 1 a f) B: g- J& @
水池长(m) ; T# O! j# C6 O2 _0 C' W b, R9 I
1 - J; h7 N/ |5 |% @; a
0.77
, f0 _( F* o" _6 _* a) ] 2
4 c, O6 K9 `% M1 C& e8 _6 r 300 $ t) Y2 R/ ?1 v. r) {+ w( K
0.77 ' N/ o$ I7 v* h7 e' Q1 P4 m
20
% L# A% d4 b0 J 323.54 4 ~ M1 d3 v1 t+ L4 |# v# r( G
2
5 j8 `6 d* b- ~$ Z, j 3.08
+ z! Q/ h3 ]# L. u6 s/ q1 t1 }1 M) o 4 2 d1 O0 T: |, A4 t
600
5 p# L% I4 ?8 n 3.08 " O6 O; r& z# ^: {& |; v5 g
20
1 k$ M/ A" E$ ?1 _2 Y$ V 630.15 ' X" B: x! m' o& E1 L+ T0 N& N5 ?0 Q+ K
3 % m3 ?, v! W& {1 l1 Q& S
6.92
( u' {2 C/ c+ t9 r 6
& t8 {7 V+ C @) ~' V 900 ( @/ U1 x) L" `, _6 R9 L
6.92
4 h- e+ F& ]/ S" x! d5 P% F5 Z 20 3 w7 |' O4 I" ?$ N! p( O
939.85 : c4 Q! S4 K+ w R' a( s
4 2 k2 ~" ] i: \
12.31
5 X! j: S3 i; r 8
. w' T p( G$ _ 1200
# ~5 C( _, ?' t+ Q/ x 12.31
# t$ h- a9 G* q; z; s0 ?# u- v 20
- q/ a/ f7 \& V1 L8 A 1252.62 1 ]. b8 M: i6 q0 Z) G; ?
⑵以任务量对水池长度进行分析
8 Q0 {; m4 \' U4 x+ O5 X% d 因国标允许多次重复采样完成检定,水池越长重复采样的次数就越少,检定时间就会越短,因此水池长度还要根据具体年度检定任务量进行合理推算[11],本文不再赘述。
. l9 s! C7 S! p& _+ j* v' t ⒉存在旁瓣影响时所需水池深度计算
4 g( ~2 X6 p0 S+ i9 D+ g7 Q 如图1,depth为水池深度,width为水池宽度,h为仪器入水深度,d为仪器直径,D为仪器至池底距离,θ为波束角,φ为换能器主旁瓣所在平面与池底面的交线和池底边夹角,OF⊥GF,OH⊥GH,D=OA=OG。 / i& J1 m! K* V0 z Q
为确保ADCP计量检定效果,应获取至少2个完整且质量较好的深度单元流速数据。水池深度的具体计算公式为:
" a$ p4 @; j, }- p# k depth=h+h1+n×c+h2 ⑴
" V8 |3 a" G8 E 式中,h为仪器入水深度,取值0.5m;h1为第一层深度单元中心至换能器距离,可通过该型ADCP自带仪器软件获得,取值12.71m;c为最小深度单元长度,取值4m;取2个完整的流速数据,此处n=2,h2为旁瓣影响区长度,即h2=HA=OA(1-cosθ),其中θ=20°。  , k; A2 b6 f! R7 A" c+ |; { , k; A2 b6 f! R7 A" c+ |; {
图1 水池宽度和深度计算用示意图(考虑旁瓣)
" @% W# c6 \! P7 j3 _ 由图2可得出: 4 i1 `& b" l) O8 y& @
h2=OH/cosθ-OH ⑵
. M! V1 k# [6 P1 }) G 将OH=h1+n×c带入式(2),得:
# G4 m: M! o* Q h2=(h1+n×c)/cosθ-(h1+n×c) ⑶ ! N) `8 k$ o1 g, e9 ^& \# N1 Z8 @
将式⑶带入式⑴,并带入相关参数可得到水池最小深度depth为22.54m。  ; n3 p+ K# `. O$ a5 z. _7 M( L* X
; n3 p+ K# `. O$ a5 z. _7 M( L* X 图2 检定安装位置示意图
' }/ \6 \# }* ~, i; x. Q+ f# k ⒊存在第一旁瓣影响时所需的水池宽度计算 - b5 a" L* O8 O' B/ N9 t7 }
ADCP计量检定对水池宽度主要有两个影响因素:池壁旁瓣影响、仪器换能器与池壁的夹角。由图1可以看出,为完全避免声束主瓣到水平方向之间旁瓣的影响,水平方向上换能器到池壁的距离OC必须大于等于OA的最小值(即水池最小深度-仪器入水深度)。检定时,ADCP在水池中安装位置见图2,图1和图2中φ相同。由图2可知,水池最小宽度计算公式为:
6 X9 v8 I0 e" k" f. g0 s width=2×w+d ⑷
3 h) E7 a8 P* g6 R8 Q 式中,w等于OG×sinφ与OG×sin(90-φ) 中的较小值,d取RDI型ADCP最大直径0.55m,可证明当φ=45°,OC=OA=depth-h时,水池宽度最小。代入式⑷,可得水池最小宽度width为31.71m。
/ G6 I1 H# L7 h ⒋讨论
6 f( `, w n I 在检定ADCP时,若能在4个换能器端安装导流吸声罩来抑制旁瓣对池壁的影响,理论上可减小对池体宽度的需求。下面分析旁瓣被抑制后水池宽度需求,本文暂不讨论加装导流吸声罩抑制旁瓣的实现方法。  3 s& }' |5 S" }, s 3 s& }' |5 S" }, s
图3 水池宽度和水池深度计算用图(抑制水平旁瓣) " h) m# W3 W) h! n1 o
由图3可知,若旁瓣得到抑制后,OC′为主波束的边缘线,为了完全避免池壁的影响,OC′必须大于等于OA的最小值(即水池最小深度-仪器入水深度),OC′与OA之间的角度为(θ+β),β为一半的波束宽度,取值2°,水池最小宽度计算公式为:
0 w- ]2 ~" B( w width=2×OC′×sin(θ+β)×sinφ+d ⑸ # N8 B% d! i2 H4 B
当旁瓣被抑制后,只考虑主瓣对水池宽度的需求时,可证明当OC′=OA=depth-h时,且φ=45°时,水池宽度最小,代入⑸式可得水池最小宽度width为12.23m。
; y" E: W9 U/ B+ n2 J& ]5 M 综上分析,为了满足WHLR-75K ADCP的计量检定需求,水池深度应不小于22.54m,不抑制旁瓣与抑制旁瓣时水池宽度分别应不小于31.71m、12.23m。
4 a3 s6 Q, }/ q- P+ L0 j5 R ⒌不同工作频率ADCP水池宽度和深度计算
$ b! J4 k+ Z& @" g 根据2008年实施的《HY/T 102-2007声学多普勒流速剖面仪检测方法》[12]及国标[3]提供的ADCP工作频率分类,以美国RDI公司生产的Workhorse系列ADCP产品参数为例,可计算得出不同工作频率ADCP对试验水池的宽度和深度需求,详见表2。
* L" ?; U8 h+ [" \" n* @ 表2 骏马系列ADCP产品参数及水池宽度和深度需求计算 / e; {: ~9 n: X1 U/ d
型号/频率(kHz)
3 _2 o, ~( M( x- O1 X Long Ranger 75 0 b5 p1 L4 [2 X& }& o
Quartermaster 150
- i; o4 l7 T* z0 g+ @ Sentinel 300
4 E. Q* u# P; g; [ Sentinel 600
8 v4 `% f! D4 Q Sentinel 1200
: G! t) K0 U6 _0 l+ u 起始测量深度(盲区)/m
3 F- C2 C8 S) W# [ 8.0
/ x9 o4 z% _, D( H9 T 4.0 : v+ @' j! K9 v" o9 g
2.0 7 e+ ^5 D% O1 P0 g3 o
1.0
* G+ a# {6 j+ i- P 0.5 . d0 x( f: ]# R. s' W7 ], v* U5 l- d
波束角θ/°
( y0 Z3 t- L2 b( f0 u 20 2 {1 j% b1 R" r. n, w; `% U, O! q
20 * r) b# d5 _4 R! \0 E6 v( A; i
20
- ]8 T: [0 ]8 Q; a) F" j* x# { 20 1 ?8 k0 o- |! }+ p
20 0 P! g5 m1 A6 g! W t2 i
波束宽2β/°
! I o/ H! }: |: J+ r 4 ! B/ e6 `# t. p+ `7 A2 }2 V/ S
4 8 ^: Y; p4 P& k0 O6 V z( B
4 3 [0 g4 i* Q0 F1 m7 E- ?2 b( x
4
7 w! J& N9 C+ N, u( y 4 . l" T1 ]3 p U' R6 n( @
第一层深度单元至换能器距离h1/m 2 C: |- m, Y! k2 Y6 H1 L! T) \
12.71 9 ]+ h8 j9 C6 n* T
6.35
6 @8 q- }8 M# j- @ 3.21 4 \* {) {( {8 H1 V, ?
1.6
1 _* T; w) Y) U, F( t# H 0.8
1 c! T4 H+ D/ P( b 最小深度单元c/m
9 j: ?4 o0 z! X# d' F9 l 4
& Z# y) A8 a9 J- }3 w$ Y 2
& a4 T' I% x3 I4 m8 E0 L 1
* @/ X9 y( S g& z( Q 0.5 - L, z% D* E+ O" [( F$ G+ ^6 t' x
0.25
8 F' \; v& q) P# w, p; P 仪器直径d/m 9 h* C, p9 X- I& g' B
0.55
, \" w' `0 t9 P 0.49
% n; p: P! }+ X0 k 0.23
3 Y% R j7 w' l4 e' D( S 0.23 1 ?/ Q4 Y% V/ @0 g
0.23 / [) W5 X/ k$ o& V: E2 I
水池深度depth/m
- O+ r9 S, S: W% } Z* k. C; A 22.54
* c' T1 G6 r, N9 J 11.51
' }( n5 ^# i: Z 6.04 ) ]) {4 _# k2 e1 x0 f! @; P) ~, o
3.27 ( z/ S2 K& a' x$ ^, o; f ]& u
1.88
" X: M0 p' Q/ i5 N! p% {, ` 不抑制旁瓣水池宽度with/m
2 ]7 s* F9 B& I( M 31.71 p$ h# p7 o" G( H* N% R/ q- [4 ?" x
16.06 : a, f4 W' [( J1 ?
8.06 - O9 I; |# b4 X, p7 Y' O2 o' p4 g- u
4.15
4 [. U8 J0 b# {; | 2.18
/ ]; }) J3 l+ U1 _$ a 抑制旁瓣水池宽度with/m
; N# g6 x+ F& \ 12.23
. z$ K" W: d, O& } 5.83
2 D/ z$ W/ S! v* e% `$ o3 G% T 2.93
0 Y! G# Y- ?6 z7 |3 E 1.70
6 ], w: l1 I/ q, l# N- q4 u 0.95
: t! m5 {0 M6 }; [" ^ 五、结论
2 V1 f' K8 y( ]2 G: v 为满足当前ADCP计量检定的迫切需求,本文依据水声学及ADCP工作原理,参考国外相关经验,结合ADCP检定现状,对ADCP水池拖车试验中水池池体需求提出了新的计算方法,推导出了具体的计算公式,得出了不同工作频率ADCP检定所需的水池尺度需求值。其中,在计算水池宽度时,分别考虑了存在旁瓣和抑制旁瓣的情况,并进行了计算比较,得出了在检定时若能抑制ADCP换能器旁瓣,可大幅降低对水池宽度的需求。本文的研究量化了水池拖车试验对池体的具体需求,进一步完善了ADCP计量检定的理论基础,为ADCP在室内可控条件下检定规范的制定及检定平台设施建设提供一定的参考与借鉴作用。 ! W2 Q6 k5 c y
参考文献: 9 ?" c+ L. t( t) b0 N
[1]李雨,袁德忠,周波,等.ADCP在水文测验中的应用及其发展前景[J].人民长江,2013(z2):35-38. 1 Z" `' ?- K6 I* N0 d
[2]周庆伟,张松,汪小勇,等.声学多普勒剖面流速仪检测方法探讨[J].海洋技术学报,2016,35(4):31-35.
7 a4 t8 c7 v* O" Z9 \ A [3]中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T 24558-2009声学多普勒流速剖面仪[S].北京:中国标准出版社,2009. 6 L; `% L$ \# T2 a
[4]赵越,英小勇.声学多普勒流速剖面评价方法介绍与探讨[J].水利信息化,2010(4):58-61.
' b$ U. y+ j7 P' k% c$ v [5]姚永熙.水文用声学多普勒剖面流速仪的计量检定[J].水利技术监督,2008,NO.2:45-49. ' n/ F3 K( q$ G
[6]李占桥,田志光,吴宝勤,等.两种型号RDI ADCP测速精度分析[J].海洋测绘,2012,32(6):57-59.
7 G7 l# u( ~$ F% Y$ q; b [7]voulgarisG,Trowbridge JH.Evaluationofthe acousticDoppler velocimeter (ADV) for turbulence measurements[J].Journal of Atmospheric&Oceanic Technoligy,1998,15(15):272-289. / D6 N8 y Y! t2 K( E3 y- |2 b6 A
[8]Shih H H, Payton C, Sprenke J, et al. Towing Basin Speed Calibration of Acoustic Doppler Current Profiling Instruments[R]. Joint Conference on Water Resource Engineering and Water Resources Planning and Management. 2000:1-10.
; n0 `+ @+ G+ J+ _2 G [9]刘德铸.声学多普勒流速测量关键技术研究[D].哈尔滨:哈尔滨工程大学,2010. , i% W, F% _+ w7 l- G! \
[10]胡波.声学多普勒流速剖面仪检测与检验关键技术研究[D].天津:南开大学,2013.
1 T& Q5 _3 w" ~3 M. F& P [11]智永明,邵军,唐跃平,等.ADCP流速仪检定拖车驱动方案探讨[J].中国测试,2016,(42)11:79-93.
' Q% n8 _( n6 Z9 P9 o _) G [12]国家海洋局.HY/T 102-2007声学多普勒流速剖面仪检测方法[S].北京:中国标准出版社,2008.
5 W" q6 r! f* @: w" n4 \ 【作者简介】第一作者乔正明,1984年出生,男,山东商河人,工程师,本科,主要从事海洋装备计量检定研究。本文为基金项目,国家自然科学基金面上项目(41775027),国家自然科学基金青年科学基金项目(41405025);文章来自《海洋测绘》(2018年第5期),版权归《海洋测绘》所有,转载请备注论文作者,说明文章来源,并请备注由“溪流之海洋人生”微信公众平台整理。    9 C+ Q) \' K) c. z1 { 9 C+ Q) \' K) c. z1 {
相关阅读推荐 % i& U3 U( m+ I7 O8 ~. g/ v
征文作品▏阳明:ADCP测流为什么不做声速剖面改正 8 T, D. H4 d: G
论文专区▏海流测量技术发展及应用 % |9 k+ q1 g ~0 j, L
海洋军事▏海洋环境对潜艇活动的影响 - P2 Q8 ]8 K/ g* I
院士论坛▏吴立新等:物理海洋观测研究的进展与挑战
- T7 @" V2 Q' F) p* x 海洋技术▏欧洲国家的海洋观测系统及其对我国的启示      2 y3 d5 ]6 k8 I: b* `. F/ G0 [3 _
2 y3 d5 ]6 k8 I: b* `. F/ G0 [3 _ 公众号
; i' f7 {! I0 X+ d y" } 溪流之海洋人生
2 s& q& F; Q, A4 [8 c+ b. a% J9 @9 F. u 微信号▏xiliu92899  . g' T! q- Q1 o6 ~# U . g' T! q- Q1 o6 ~# U
用专业精神创造价值 . e2 {: x! p4 B
用人文关怀引发共鸣 您的关注就是我们前行的动力 4 t- T: |' ]0 E0 M! ~/ F6 T k
投稿邮箱▏452218808@qq.com   + D3 M7 |$ U% q) J& m/ b, U# b6 Q. M; ~4 u& y; ]
* `5 C- Z( T% a8 |% b
7 H- R6 P7 C' B( W1 e& T
8 e) U' V$ t+ S2 O" C+ s
+ D3 M7 |$ U% q) J& m/ b, U# b6 Q. M; ~4 u& y; ]
* `5 C- Z( T% a8 |% b
7 H- R6 P7 C' B( W1 e& T
8 e) U' V$ t+ S2 O" C+ s | 

