|
3 }1 @4 Z) Y) O& T$ f 摘要
1 m) w% o, @! s: N8 z+ y% G' H 作者:李 锋1,2,陈毓伟3(1. 中国船舶集团有限公司第七一○研究所,湖北 宜昌 443003;2. 清江创新中心,湖北 武汉 430076;3. 中国信息通信科技集团武汉光迅科技股份有限公司,湖北 武汉 430205)
# C& T) G4 p$ }8 |% \3 ~ 摘 要:卫星的通信导航定位是现代海洋环境立体观探测平台不可或缺的重要组成部分。基于北斗三号卫星全球导航通信融合技术特点,结合全域海洋环境探测任务背景,以站位国家海洋战略发展和工程集成现实的双向视角,剖析北斗三号功能、性能特性及在海洋环境立体观探测领域的应用需求;立足终端,重点从形态、方案、指标 3 个方面探讨北斗三号导通一体模组与海洋环境观探测无人平台嵌入式、模块化综合集成方案的实现。
; v4 R, v- m9 V7 ?4 [" h/ V 关键词:北斗三号;导通融合;海洋环境;立体观探测
4 Y- V c6 D/ x/ C/ s- | RECRUITMENT
' |* Y4 }. @# [ 0、引言 “海洋环境探测平台”是指搭载系列海洋环境探测传感器,集信号采集、处理和传输一体化的海洋工程载体,达成海洋动力环境观测、生态环境监测、资源生态调查、科学研究以及海战场攻防作战等海洋环境信息参量的获取工作。广义的海洋观测平台包含天基、空基、岸基、船基、海基、潜基、海床基等。这些平台和通信卫星系统构建空–天–海–潜–底五位一体的立体、长周期、全要素观探测体系,实现人类对海洋环境要素的连续、大面积、实时观探测[1]。海洋环境立体观探测平台通过综合集成各种海洋技术(海洋基础技术、海洋相关技术、海洋应用技术),形成一个多维仪器、装备以及工程的系统。作为实现功能和技术指标的基本平台,搭载海洋环境观测载荷的载体,涵盖水面、水下至海底任务空间,担负海洋水文、气象、水质、地质地貌、海洋物理、海洋声学、海洋生物及海洋化学等海洋泛在学科领域的观探测任务。是人类感知海洋、认知海洋、经略海洋的技术基础[2]。海洋观探测能为海洋预警预报、海洋空间规划、海洋生态管理、海洋资源开发和海洋维权、海战场建设以及海上方向联合作战提供参考信息,是支撑国家利益向海拓展和海上实战效能提升的“倍增器”,具有典型的各方共建、共享、共用的多融合属性。在某种程度上,海洋环境探测成果能为我国实现现代海洋强国、抢占制海高点奠定基础。同时,它也反映了一个国家真实的海洋竞争实力和综合国力。自 20 世纪 80 年代以来,随着卫星通信导航(定位)技术的进步,推动了以无人化、自动化和智能化为主题形态的海洋环境观探测装备体系快速发展,并支撑海洋环境观探测领域越限破阈,步入“多元化、实时化、长时序、立体化、网络化”的可持续发展阶段[3]。相较于传统海洋平台的综合导航(定位)通信体制,星基通信导航技术体制作为现代海洋环境观探测平台两大核心共性技术,具有从服务区到工程实现的、无可比拟的广域海洋场景适配优势。其关键性和保障性地位,是海洋平台发展和海洋探测领域进步不可或缺的支撑技术基础。可以说,没有星基通信导航系统的支撑,就没有现代海洋环境立体探测体系的建立。
$ b$ s D9 p, e* x& F 1、 北斗对海洋探测平台的支撑作用 “十五”以来,与北斗大系统“三步走”战略同步,历经 10 多年的实践探索和技术攻关,我国“海洋环境观探测装备平台+北斗”应用模式渐进成熟,体系化推进海洋环境观探测平台嵌入式、融合式、模块化集成应用。北斗导航定位、信息传输在海洋环境观探测中的重要作用不可或缺。目前,北斗三号全球卫星导航系统(BDS3,简称北斗三号)是我国新时代自主时空通信定位基础设施中最先进的。北斗“PNT(定位、导航、授时)+短报文通信”已实现全球服务,具备导通一体、位置跟踪、直达末端的特色基础信息支撑属性。此外,北斗三号新体制信号在接收灵敏度、抗多径干扰能力上也较北斗二号有显著提升。短报文通信全球覆盖、数据扩容等关键性增量通信载荷等,都对海洋观探测领域升级换代意义深远,成为支撑海洋环境观探测装备体系拓进全域海洋应用场景的最优工程选择。北斗终端嵌入式/模块化北斗应用模组支持 RNSS 和 RDSS 一体功能,具有通信导航一体化技术(CPIT)属性,拥有成本低、安装约束小、适装性好等工程集成优势,赋予了海洋探测平台制信息权、制智权的深刻内涵。为海洋环境观探测装备平台提供覆盖全球的实时、连续、安全和精确的定位、测速、授时信息和位置报告、短报文通信服务。基于加快海洋强国建设的时代大背景,以北斗三号为创新引擎,挖掘“海洋环境观探测装备领域+BDS3”技术手段融合实现,创新应用北斗三号星座通信增量服务,适应性构建“海洋环境观探测平台+BDS3”迭代应用模式,可望破题自主化、覆盖区和信道容量系列领域导通保障手段与能力困境,强化对平台的精确控制、任务的及时调度、数据的实时交互,实现全域可达、全链贯通、可信可靠、简洁高效,全时空、全剖面覆盖海洋观探测平台任务系统需求,进一步赋予海洋物联网前沿感知节点特质[4-5],支持生成“基于北斗三号的全球/区域海洋环境观探测网系态势”,助力我国陆、海、空、天、潜、底海洋环境观探测体系全球化布局转型,进而支持国家战略利益获取,推动国家战略空间持续向深海和远海拓进[6]。目前基于北斗三号的海洋自主式探测平台,除了剖面浮标(ARGO 浮标)、水下滑翔机(UG)、波浪滑翔器(AUG)、自主潜航器(AUV)及水面无人艇(UUV)等无人自主移动观探测平台外,还包括漂流/锚泊浮标、锚系潜标、海床基、地波雷达等多种定点或无控漂浮平台。本文探讨“海洋环境观探测无人平台+BDS3”的典型应用需求
- G, [! h9 h# Y+ L0 J# b 与方案策略。 : [1 L1 I5 a* S: U/ S+ Z& Q- M
. P! l9 A9 D+ j. J( R, _
1 X% P$ G& `+ m& ?2 Q! o5 ]
- w6 y. z6 R, M

\8 i- }( y( B Z
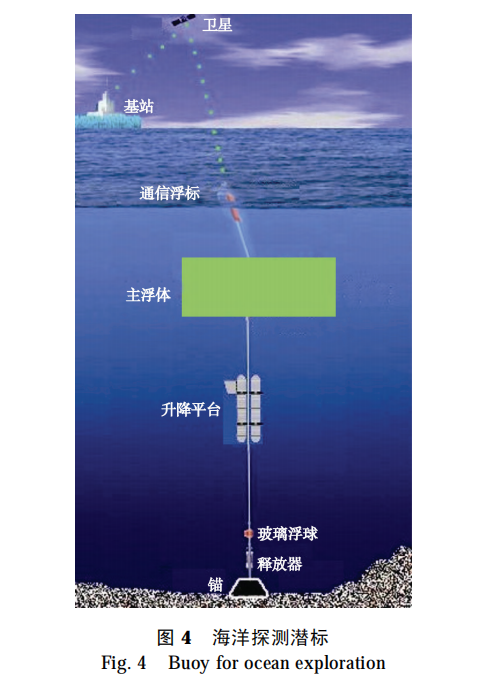
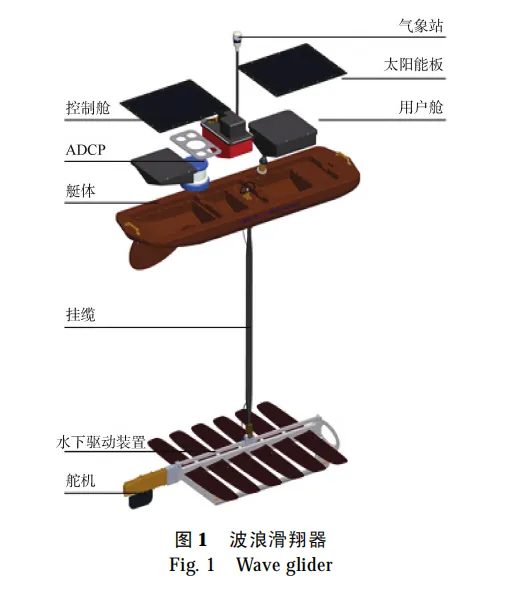
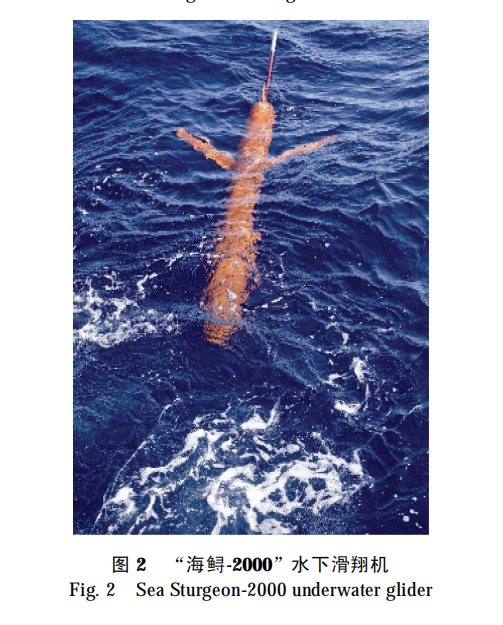
波浪能滑翔器是一种利用海洋波浪起伏能推进的海洋环境探测平台,其控制与通信电路采用太阳能板供电。系统具有卫星通信、全球定位和自主导航能力,被称为永不停步、畅游海洋、1 年10 000 km 的海上永动机,能够实现大范围、远距离的海表水文及海面气象走航测量和测量数据实时回传能力[7]。海洋环境定点探测潜标系统通过锚系装置,把潜标体锚泊在海中一定深度处,具备从近海面到水下几千米深度的温、盐、深、流连续、长期、自动测量和通过卫星中继数据回传功能。海马系列剖面测量浮标,是一种在随波横向漂行的过程中,通过浮力调节装置上下蛇行,实施对海洋环境参数的剖面测量[8];系统浮出水面时,利用卫星中转回传数据。水下滑翔机利用浮力调节和航向控制技术,在水下滑翔航行,滑翔期间完成诸海洋环境要素的测量;滑翔出水时与卫星通信,上传测量数据[9]。广袤深邃的海洋因其海水介质、环境、深度、空间等独具的特殊性与未知性,决定海洋环境立体观探测装备一方面涉及诸多学科,技术含量高;另一方面因长期独立工作于恶劣的海况下,需要极高的可靠性,导致其具有与其他技术装备不同的特质。因此,在海洋探测领域共性支撑技术体系中,北斗三号卫星系统作为自主星基导航通信体制,涵盖海洋环境观探测平台 2 大关键核心共性技术,具有无可替代的广域海洋场景配置优势。对于支撑以无人化、自动化、智能化为主题形态的海洋环境观探测装备体系的深度发展以及推动海洋环境观探测领域“多元化、实时化、长时序、立体化、网络化”的持续进步,起到无可替代的基础保障作用,是平台进步和领域进步不可或缺的配套技术基础。
8 v N" a$ i+ N% E2 E4 W9 R
. h2 W. X" ^, }- ~
2、 海洋探测平台对北斗三号应用需求分析 北斗导通一体终端模块具有成本低、安装约束小、适装性好等优势。“十五”至今,随着两代北斗入役,我国海洋环境观探测领域不断探索以北斗定位通信为基础技术平台,围绕海洋环境观探测信息的传输短板,着力开发了基于北斗的 C-ARGO、海洋水文监测潜(浮)标系统、自动气象/海洋站等系列化创新应用,初步解决了长期困绕海洋领域的信道与定位 2 大自主基础技术支撑难题,推动了北斗在海洋环境信息领域的嵌入式、模块化应用,形成北斗在海洋环境信息体系中的多元保障作用。典型应用示范为 C-ARGO 浮标,为一种技术性能上可比肩国际通用 ARGO 的国产海洋剖面探测浮标。传统概念上的 ARGO 浮标(自主式温盐深剖面探测浮标)是一种通过全球海洋布放,利用卫星通信定位,建立全球海洋观测网的专用海洋环境剖面探测设备。ARGO 浮标的核心采用美国 GPS通信定位技术,通过法国和美国合作运营的ARGOS 卫星系统传输海洋观测数据,数据落地法国 ARGOS 中心汇总处理,再按不同国家的权限分享成果。不难看出,ARGO 实质上从设备层到数据层全面由欧美国家掌控,形成探测数据成果向他们单向透明。海洋环境信息关系国家安危,无法掌控的 ARGOS 系统数据单向透明,无疑会对我海洋主权乃至国家安全构成严重威胁。随着我国海洋探测领域 ARGO 类浮标部署需求的激增,迫切要求国产 ARGO 类浮标从设备、定位跟踪、数据落地、成果应用全环节,打造基于北斗导通一体的海洋探测平台,此需求催生了国产 C-ARGO 浮标的问世。C-ARGO 浮标采用“海洋立体观探测平台+北斗”新体制,达成了基于北斗的广域浮标位置跟踪与数据回传落地我国,确保我海洋探测信息的自主、安全、可控,进而在某种程度上打破了国外在此领域一统天下的局面。目前,北斗三号大系统导航性能已全面满足海洋环境无人观探测领域相关需求。终端模块可使用北斗三号全频点信号实现全球范围内的高精度定位、授时、测速功能,单点定位精度可达 7 m,SBAS 定位精度达到 2.5 m,后者的定位精度不但远高于前者,而且较北斗二号同类型号定位精度也有显著提升。此外,北斗三号新体制信号在接收灵敏度、抗多径等能力上也得到明显增强,使其更加适用于无人平台广域海洋应用场景(见表 1),是一种不依赖GPS、GLONASS等国外卫星导航系统,实现全球海洋部署任务、卫星导航保障完全自主可控的国产系统。“海洋环境观探测装备平台+北斗”应用模组以嵌入式/模块化形态,支持 RNSS 和 RDSS 一体功能,为海洋环境观探测装备平台提供覆盖全球的实时、连续、安全和精确的定位、测速、授时信息和位置报告、短报文通信服务。 海洋环境观探测无人平台可靠导航、定位、定时工程应用时,北斗三号是现阶段我国精度性能最高的自主手段。根据海洋无人平台应用特性,北斗应用模组为潜/浮标、自动气象/海洋站等无人平台背景唯一示位标定单元;基于星基弱信号体制而易干扰、无法入水等局限,以 AUV 为代表的水下移动平台背景通常与惯性、水声及海洋物理场匹配等手段组合构架导航任务系统,是提供精确时空基准信息的核心模块。北斗短报文通信与其它卫星通信体制有着显著区别,系统按用户级别规定相应服务频度(最高1 次/s)、报文长度(区域短报文最长 1 000 汉字,全球短报文最长 40 汉字)和优先级(高优先级用户在同等级服务申请时将优先考虑),理论上服务性能存在动态变化,且因系统容量限制,多数海洋无人探测平台用户难以申请到最高级别服务。在普通低级别服务条件下,我们通过对北斗二号应用探索实践的分析,发现通过终端侧技术手段,应用北斗三号通信扩容增强可满足各类海洋环境观探测无人平台数据回传、位置报告、控制/遥控等信道保障要求[10]。此外,考虑到信道的可用性与容量,北斗短报文还可作为其他主用通信手段以外的备份和应急手段。 [: t! O+ q5 I, k% y* k' Q 海洋环境观探测无人平台可靠导航、定位、定时工程应用时,北斗三号是现阶段我国精度性能最高的自主手段。根据海洋无人平台应用特性,北斗应用模组为潜/浮标、自动气象/海洋站等无人平台背景唯一示位标定单元;基于星基弱信号体制而易干扰、无法入水等局限,以 AUV 为代表的水下移动平台背景通常与惯性、水声及海洋物理场匹配等手段组合构架导航任务系统,是提供精确时空基准信息的核心模块。北斗短报文通信与其它卫星通信体制有着显著区别,系统按用户级别规定相应服务频度(最高1 次/s)、报文长度(区域短报文最长 1 000 汉字,全球短报文最长 40 汉字)和优先级(高优先级用户在同等级服务申请时将优先考虑),理论上服务性能存在动态变化,且因系统容量限制,多数海洋无人探测平台用户难以申请到最高级别服务。在普通低级别服务条件下,我们通过对北斗二号应用探索实践的分析,发现通过终端侧技术手段,应用北斗三号通信扩容增强可满足各类海洋环境观探测无人平台数据回传、位置报告、控制/遥控等信道保障要求[10]。此外,考虑到信道的可用性与容量,北斗短报文还可作为其他主用通信手段以外的备份和应急手段。 [: t! O+ q5 I, k% y* k' Q
3、 基于无人平台嵌入式/模块化的北斗三号模组
; M |% U% @; w1 u 3.1 工程集成形态分析 基于深远海场景越来越复杂、传输距离远、数据量大、时间长、点位多,传统技术已难以满足观探测能力要求和适配导航通信保障需求。北斗导航/通信任务系统一体化和集约化已成为海洋环境无人观探测领域嵌入式、模块化工程应用的主流趋势。长期自主工作是海洋环境观探测无人平台的突出特性与优势,而与之相对应,各类海洋探测平台普遍采用电池供电方案,需要考虑系统整体重量和能源系统限制问题,平台各任务系统需在能源受限工况下均衡共用无人平台携带的电力。鉴于无人平台能源保障和体积布局制约,嵌入式北斗模组尤其需要注重尺寸和功耗控制,通过元器件高度集成和与不同模式的优化,确保在满足性能要求的条件下,尽量缩减模块体积、重量和功耗,达到满足执行全任务周期的目的。此外,随着我国海洋环境观探测无人平台持续高速发展,平台从种类到数量持续增多,对北斗三号导航/通信模组工程应用模态要求越来越高。从AUV、滑翔机等机动平台导通多体制综合集成应用,到气象/海洋站、漂流浮标、潜/浮标等平台单一北斗导通体制应用,都进一步要求北斗三号导通一体化模组向标准化、模块化、通用化发展,以增强载荷的适装性和可维修性。. u( ^7 L {4 j% N- a1 I) d
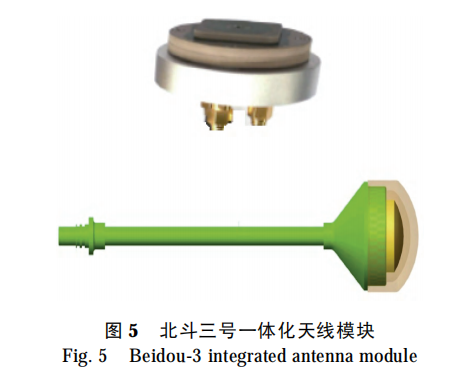
3.2 模组基本组成及工作原理 目前,在研海洋观探测平台均开展了北二向北三模组的换代工作,基于“海洋环境观探测无人平台+BDS3”全方位迭代要求,为解决自身系列化产品问题,采用了基于无人平台嵌入式/模块化的北斗三号模组(见图 5 和图 6)。该模组采用芯片式结构设计,集成为小型 OEM 板卡形态,支持北斗三号 RDSS(区域+全球)/RNSS 一体工作,具备集成度高、可靠性好、尺寸小、响应快、功耗低等特点,且充分考虑与平台共形安装、“六性”设计等特性解决方案,丰富了“三化”特性内涵,成功实现了 HM2000 型/HM4000 型剖面浮标、水下滑翔机、波浪滑翔器、大深度潜标系统等系列海洋环境无人观探测产品北斗二号模组向北斗三号的升级替代与集成优化,具有较强的典型示范作用。北斗三号模组由天线、主板模块及配套线缆和软件组成,采用平台电池直接供电。天线为定位、定时、短报文功能提供射频信号收发功能并进行相应抗干扰处理;主板用于处理天线接收的北斗三号RDSS(区域+全球)/RNSS 信息,完成区域和全球短报文通信信息的收发处理,从而实现基于北斗三号的海洋环境观探测无人平台精确导航/定位与控制、短报文交互和位置报告等功能。" I/ n5 }$ Z0 a/ Y1 q @
( A- ]* l ?+ Y4 J4 _8 Y

/ g0 i6 R, y6 J6 J% [; \
4 \* K5 h! F4 H3 C t) _ 4、 系统方案概述 7 Z7 O: v2 Y* V8 S! l# Z& A
4.1 硬件方案 主板模块包含北斗、主控及接口等基本单元。北斗单元集成功放/低噪放子单元、4 通道射频子单元、基带子单元等,主要接收处理北斗三号 RDSS(区域+全球)/RNSS 信号,兼容 GPSL1 频点,完成定位、定时解算以及短报文通信功能。主控及接口单元主要实现整机各单元管理、接口扩展、显示输出及外部信号接入处理等功能。2 C0 n+ O( I$ p: D' j
4.2 软件方案 软件主要包含 BDS3 信号与信息处理软件,以完成北斗卫星信号处理、电文解析、定位解算以及定时功能,并输出平台 BDS3 定位、测速、时间信息,以及实现北斗三号区域和全球短报文通信功能。根据相关平台任务背景,选配抗干扰处理软件、显控软件等。7 Y+ N2 H" l+ v2 m6 t
4.3 接口方案 主要通过有线手段为海洋环境观探测无人平台导航控制、数据通信等相关任务系统提供平台位置、速度和时间等信息和通信功能;为兼顾新平台应用和现役平台加改装需求,主要对外信息输出接口为 CAN 网和串口等,并可据需要提供以太网口扩展。
1 K; b+ l# K6 \* | 4.4 达到的指标 综合评估北斗三号系统提供的新体制信号服务性能,同时考虑海洋无人平台存在较大可能回收失败或失控概率,为规避敏感授权模块风险,系统主要考虑应用民用服务,即通常采用民用频点导航和通信信号,进而得出“海洋环境观探测无人平台+北斗三号”应用模组导航(定位)和通信主要指标。1)基本导航信号的导航定位基本指标。全球定位精度(PDOP≤4,95%置信度):水平方向优于 7 m;区域定位精度(PDOP≤4,95%置信度):水平方向优于 6 m;授时精度:≤20 ns(95%置信度,1 PPS)。2)短报文通信服务基本指标。接收及处理北斗三号系统短报文通信服务信号,提供北斗三号区域、全球短报文收发服务;综合北斗三号短报文服务性能上限,并考虑与现有北斗二号短报文终端尽量兼容,基本指标如下。接收信号频点:S2A、B2b、S1Q;发射信号频点:Lf3、Lf4;区域:支持单次发送最长报文 1 000 个汉字;全球:支持单次发送最长报文 40 个汉字。
# h( {# I A0 N* k% ^
- Y4 S. L: K# O6 ~7 s0 P 5、结束语 本文以海洋无人自主平台为应用背景,基于自主可控的性能特点,对海洋环境观探测无人平台星基导航通信体制进行了深度辨析。提出了海洋平台端嵌入式北斗三号 RNSS/RDSS 一体模组基本方案设计和“三化”发展方向,进而梳理分析出海洋环境立体观探测领域基于北斗三号的导航示位、数据回传、多模监控、控制/遥控及立体组网等典型应用策略及信息流程。通过挖掘“海洋环境观探测装备领域+BDS3”技术手段融合实现,提出了新时代“海洋环境观探测无人平台+ BDS3”多元深度耦合模式,为平台创新发展和领域深远海拓进提供了新思路,因而对于加快我国海洋强国建设具有一定现实意义。可以预见,未来一段时间内,我国必将迎来海洋环境观探测平台发展的高峰期,也是平台装备技术与北斗三号应用技术互动协同发展的“窗口期”。同时,在挖掘北斗三号优势潜能应用的同时,我们更应正视北斗三号作为星基导通体制固有属性,通过区分平台的不同应有场景,达到继承传统技术和优化新兴导通体制的目的。另一方面,我们应立足国家顶层,研究制定“海洋环境观探测无人平台+BDS3”相关标准,强力指导、引领规范、体系推进北斗三号在海洋环境观探测领域的深度应用。改革过去那种功能单一、简单定制或复制转化等浅层应用模式,达到破解海洋探测领域北斗“三化”应用途径。同时,应基于北斗三号区域/全球短报文通信模式,规范海洋环境观探测领域数据交互压缩、解调标准,开发海洋环境观探测无人平台北斗数据链应用。最终,通过打通北斗底层用户的互通能力,达到统筹我国海洋环境观探测资源共享的目的。【参考文献】
1 K) x, ~4 O' P9 _1 z [1] 吴立新,林宵沛,刘永正.“透明海洋”立体观测网构建[J]. 科学通报,2020,65(25):2654-2661.
: i0 C* \9 L4 a) t$ N [2] 徐文,李建龙,李一平,等. 无人潜水器组网观测探测技术进展与展望[J]. 前瞻科技,2022,65(25):60-78.
b) ~4 ~3 |; Y6 X1 J6 `; D [3] 徐文,鄢社锋,季飞,等. 海洋信息获取、传输、处理及前沿研究述评[J]. 中国科学:信息科学,2016,46(8):1053-1085.
6 j* N. o( L% j1 f, x: o- ] [4] 姜胜明. 海洋互联网的战略战术与挑战[J]. 电信科学,2018,34(6):2-8. 4 H4 |, T& P( |1 r/ }3 f
[5] LIU J J, SHI Y P, FADLULLAH Z M, et al. Space-air-ground integrated network:a survey[J].IEEE Communications Surveys & Tutorials,2018,20(4):2714-2741. " }6 d" v! s+ v% @' ?
[6] 沈学民,承楠,周海波,等. 空天地一体化网络技术探索与展望[J]. 物联网学报,2020,44(9):19-26. 1 G4 r9 H! r& h7 N5 m
[7] 李小涛,王理,吴小涛,等. 波浪滑翔器原理和总体设计[J]. 四川兵工学报,2013,34(12):128-131. - |2 c% q% h. F6 y) W0 Q' P, E
[8] 王波,李民,刘世萱,等. 海洋资料浮标观测技术应用现状及发展趋势[J]. 仪器仪表学报,2014,35(11):2654-2661. 1 K; e9 e" n' J. W s& N
[9] 沈新蕊,王延辉,杨绍琼,等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报,2018,26(2):89-106.
$ e# x2 e9 v" X7 `9 n [10] 冉承其. 北斗卫星导航系统的发展[J]. 卫星应用,2013,22(4):4-7.
8 w7 n E+ f% {% `1 L: ] 
1 K v: f$ N$ b) Y; i0 h
声明:本公众号相关内容均来自主流媒体及公众号,非商业用途,并不意味着赞同其观点或证实其内容的真实性。版权归原作者所有,如有发现侵犯您的权益,请后台联系编辑,我们会尽快删除相关侵权内容。 $ V. R: D# e/ O, c: ~
0 Y4 c. [; i5 E& j; @
7 U3 O8 C# _% ?+ ]. ]; T- K* w. S
# L6 X, l' U% U+ @6 g! H( [& z
| 

