|
3 s5 |# X, P: Z! z! p- n F
/ x( A" B8 l5 u2 ~# I: x$ ^
一、海洋定位与导航 ! F. l- F$ G& C: z& I: p7 c
海洋定位与导航分为水上导航定位和水下导航定位。水上导航定位主要采用的系统包含光学定位系统、惯性导航系统(INS)、GNSS定位系统和声学多普勒定位系统(DVL);水下导航定位技术主要包含惯性导航系统(INS)、声学多普勒定位系统(DVL)和声学定位系统(长基线声学定位系统(LBL)、短基线(SBL)声学定位系统和超短基线(USBL)声学定位系统)。
! ~9 D5 {0 ?" I* ` c% s U ⒈光学定位与导航 . ]! @, n5 a& T
借助全自动光学测量和跟踪技术(测量机器人),跟踪水面目标上的棱镜,利用多站距离交会法或单站极坐标法,确定载体的实时位置。光学定位的精度为厘米级,但适用范围较短,通常限定在1km范围内,新型远程全站仪可以将作用范围扩展到1~3km。
1 v) h0 v$ @9 k/ e 光学技术仅适用于水面固定目标的定位及水面运动载体的定位与导航。 - F$ Q B- F8 E0 t" w
" a2 h7 P9 T: g. P I& }" T
⒉GNSS定位与导航 $ m+ `2 k3 `3 }& j, n: d: [
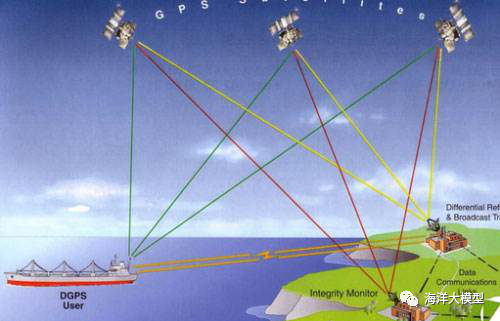
⑴GNSS导航定位系统主要包括GPS、GLONASS、BDS和Galileo系统,用户接收机接收GNSS测距信息,确定用户位置。目前海上采用的GNSS定位技术主要有GNSS绝对定位技术、广域增强GNSS差分定位技术、GNSS RTK/PPK/PPP等定位技术。 & V' g) X5 f+ S: v d& G6 p/ l
⑵GNSS绝对定位技术即单点定位技术:用户接收机接收4颗或4颗以上卫星信号确定自身位置,该方法定位精度约为20~50m,适合海上船舶导航。 ; ]- h: a6 B( j
⑶广域增强GNSS差分定位技术:利用用户接收机接收沿岸台站的差分改正信息,通过伪距差分确定用户的位置,定位精度为1~3m,适合于海面船舶导航以及测量精度要求不高情况下的海面定位,是目前普遍采用的导航定位方法。 $ P8 S2 t4 g x# j: [
⑷GNSS RTK/PPK定位技术:用户接受来自基准台站的差分信息,借助相位差分,确定精度优于10cm的平面和垂直定位结果,为水面目标提供精确的导航定位信息,RTK海上定位的作用距离一般在10km作用,PPK可延伸至100km左右,为两种高精度导航定位方法,但前者为实时定位技术,后者为后处理定位技术。
5 w7 F9 g& L1 l: r ⑸GNSS PPP定位技术:借助非差定位技术,提供平面精度为厘米级、垂直精度为十几个厘米的定位信息,该方法不受作用距离限制,但目前仅能提供准实时定位信息。
9 Z$ u+ y/ E( A9 N# `" N! H GNSS技术仅适用于水面固定目标的定位及水面运动载体的定位与导航。 ( b+ s$ S, G* V
: f2 d8 Q: w; M) h' n
⒊惯性导航(INS)
; m) y. b) S& n! }# x* | 由惯性测量装置(加速度计和陀螺仪)、计算机、控制显示装置及电源组成,其原理为牛顿运动学定律,通过测量载体在惯性参考系的加速度,将其对时间积分并变换坐标系,得到在导航坐标系中的速度、方位角和位置等信息。 & `+ k. _5 W# |3 m
惯性导航系统属于推算导航方式,即从一已知点的位置根据连续测得的运动载体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。惯性导航系统中的陀螺仪用来形成一个导航坐标系,使加速度计的测量轴稳定在该坐标系中,并给出航向和姿态角;加速度计用来测量运动体的加速度,经过对时间的一次积分得到速度,速度再经过对时间的一次积分即可得到位移。 3 m: c. f: K. d# ?! C7 i
惯性导航技术适用于水面和水下目标导航,但因为漂移和采用一点一方位推算技术,存在误差积累,导航精度会随时间的推移而降低。
4 z$ x( z8 Y& R: z6 R: @ 
* N2 S8 \$ R! M1 r! Y& l @
⒋多普勒测速导航技术 ) \( r0 H' I# P1 s3 b
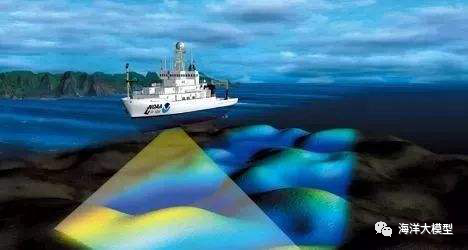
利用运动载体(水面舰船、水下潜航器)携载的多普勒测速计程仪,发射声波,根据海底回波的频率变化,借助多普勒原理,计算确定载体相对海底的运动速度,结合时间和航向等信息,确定运动载体的位置。 # f, _/ W9 g' b/ j+ {$ ?8 R, [
多普勒测速导航技术适用于水面船舶和水下潜航器导航。 0 [' t* O/ C! K* b/ n
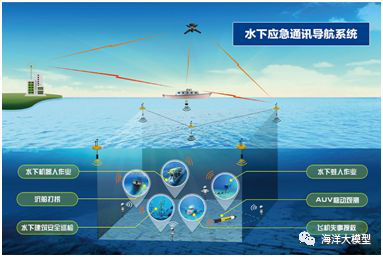
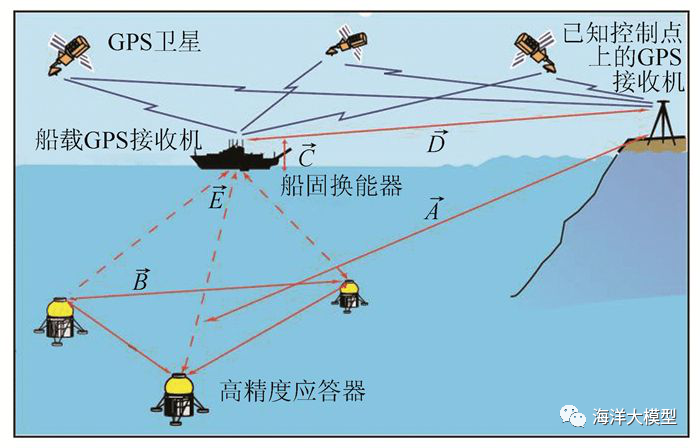
& S z+ Y- [ t' ^1 [ ⒌声学定位与导航 7 [% q4 q* S. {) j! R6 ?
声学定位于导航技术主要包括长基线(LBL)定位技术、短基线(SBL)定位技术和超短基线(USBL)定位技术。
7 g: f5 A7 |/ z; G/ @) t5 g 长基线(LBL)定位技术借助长基线(LBL)系统来完成。LBL分为载体部分和水下部分,水下部分包括多个声学信标,布设于海底,载体部分包括数据处理系统及换能器,其主要原理为通过声学测距获得换能器至应答器几何距离,通过距离交会的方法确定声学信标的绝对坐标。首先通过船载GNSS天线坐标及GNSS天线在船体坐标系下的坐标,结合船体姿态数据进行坐标转换,获得换能器在地理坐标系下的坐标。然后根据声信号自换能器至信标的传播时延,利用声速数据求得换能器与信标之间的空间距离,结合已求得的换能器绝对坐标,通过距离交会定位即可获得水下信标的绝对位置。 2 ^) v9 O2 T. s6 @3 a) C! ~" m
& D/ k- k" J! X0 k& E
(超短)短基线(USBL/LBL)定位技术借助短基线(USBL、SBL)系统来完成。SBL的水下部分仅为一个水声应答器,而船台部分则为安置于船底的一个水听器基阵和一个换能器,水听器及与换能器之间的相互关系精确测定,并组成声基阵坐标系基阵。 - X! e4 y/ F/ `4 f f
USBL与SBL的区别仅在于船底的水听器阵和换能器,以彼此很短的距离(小于半个波长,仅几厘米),按直角等边三角形布设在一个很小的壳体内,并构成声基阵坐标系。其测量方式为船体换能器发射信号,信标收到信号后发射应答信号至水听器基阵,安装在船底部的基阵接收到应答信号后,即可根据信号到达时间获得声学信号传播时延及信标相对于换能器的方位角θ,结合声速信息即可获得换能器至信标的几何距离S,利用外部传感器观测值,如GNSS确定的换能器位置、动态传感器单元MRU测量的船体姿态、罗经Gyro提供的船位,计算得到海底点的大地坐标。
! N$ s' o6 D( t- U5 N8 f 数据处理流程:首先对观测数据进行质量控制,包括船位坐标,应答器相对换能器的距离和方位,换能器的姿态数据,可采用中值滤波等方法除去粗差。然后进行声速改正,将声线跟踪时间与实际时间比较,确保两者相等,以获得准确的观测距离。最后要进行坐标转换,通过测量目标的方位角和距离,进而可以计算得到应答器在基阵坐标系内的坐标,因换能器存在安装偏差,即基阵坐标系与船体坐标系存在原点和轴向偏移,需要进行平移改正和欧拉角旋转改正,计算应答器在船体坐标系下的坐标,最后借助GNSS天线的绝对位置、船体姿态及方位角确定应答器在地理坐标系下坐标。
" O0 v0 F* H3 Z 二.海洋工程测量 . S# V4 T/ ^* r! o C
海洋工程测量主要内容包括需求分析、多海洋要素组合测量、数据处理、施工测量参数的获取及时序变化曲线的绘制等内容。
# k9 _* ? J% e1 P 海洋工程测量按照用途可分为海港工程、堤坝工程、管道工程、隧道工程、疏浚工程、救捞工程,以及采矿、能源、综合利用等,主要进行港口工程测量、地球物理测量和水下工程测量。 % U4 W% [, V# b' _7 `3 \5 l
⒈港口工程测量
, X: z. t5 G' \; @. ^ 指港口工程设计、施工和管理阶段的测量工程。设计阶段要进行控制测量、港区陆地和水下大比例尺地形图测绘、底质探测、水文观测和港区资料调查等.施工阶段的测量主要有施工控制网的布设、建筑物平面位置和高程的放样、竣工测量以及施工中的变形观测等。 4 y( e$ P7 H* J$ a2 B
在管理阶段,要对港口重要设施,如码头、防波堤进行水平位移、沉降、倾斜和裂缝等变形进行观测,用以监视变形的发展和掌握变形的规律,并提出防治的措施,确保建筑物的安全,还要为今后的设计积累资料。
" a. x c* i2 w8 O% _ ⒉海洋地球物理测量
6 |! y G0 U+ ~; C; W) ]! m7 d1 B 是对海洋底部地球物理场性质的测量。应用物理学的测量手段,可调查海洋的地质构造和矿产分布。采用的方法有:
# F& f" }4 u7 L K ⑴海洋地震测量:通过布设于海洋底部的地震仪观测天然地震的体波和微震,探索底部的构造运动;根据纵横体波的传播速度和面波的频散曲线,探索地球的结构、地壳厚度和低速层的展布等。通过人工震源的震波,查明海洋底部界面的深度、产状和地层物质属性。 2 A' O6 j. _ w8 _
⑵海洋重力测量:用重力仪在调查船上或海底观测岩层质量分布的不均匀性;通过对重力异常的分析,研究地球形状、莫霍面起伏,计算异常地质体及其密度界面的产状和埋藏深度,研究地壳均衡现象,以及地球内部的动力作用。
1 q3 Z5 a2 E4 w* _- E ⑶海洋磁力测量:分析海底岩石和矿石的磁性差异所产生的磁异常场,探索区域地质特征,如结晶基底的起伏、沉积的厚度、大断裂的展布和火山岩体的范围等,并可寻找磁性矿物。
% l9 P1 a h) e i7 o& k w: n ⑷海底热流测量:用以探索地球内部的热状态和海底区域构造。
' J6 u2 R8 u) e1 y ⑸海洋电法测量:利用地球电场和人工电磁场研究海底的电性结构。
# i6 K. \9 ^8 H2 k/ R0 `6 y ⑹海洋放射性测量:寻找海底放射性及其伴生矿床。 $ [! H9 @* ~( Y& D
⑹声学测量:利用回声测深仪和旁侧声呐等手段测量海底地形。
* s1 Y# H5 S1 A 
; G$ E- u2 b& H7 \: [
⒊水下工程测量
' Q7 x! C7 z& T. e 需要潜水器的配合,采用特殊的仪器,主要是各种声学测量系统和一些非声学方法(如水下经纬仪水下电视、水下摄影等),在水下进行测量工作,包括: 2 x" ~2 d# \ k: ?- d: g
⑴海底电缆敷设调查与测量:对敷设线路进行海洋调查与测量,提供水温、底质、潮汐潮流、海底地形、水深、登陆点等资料。 4 _ }/ S" \: l: B- V
⑵钻井的声学定位测量:综合水下声学定位系统、罗经、GNSS接收机等导航设备对钻井船实时动态定位,预防钻井船活动范围超出钻杆承受界限,保障作业安全。
/ z+ V: I: w7 H" q( x ⑶海底管道测量作业:在海底管道的规划阶段,需要有海底地形图用于选线。选定线路后,需有更精确的图用于定线,一般是在线路方向上进行断面测量和地质调查。 : h; s% O. b9 d6 O( t- `, I
⑷海底废堆积物调查:在废井口附近和海底管线施工线路附近进行场地废堆积物调查,包括位置确定、局部导航、潜水测量、数据处理等环节。
* t7 [8 p; e+ B/ Z2 R ⑸石油生产平台安装和维修的测量工作:利用精密的测量和水下声学定位设备,安装时严格对准平台的基底、中间部分和顶上部分,后期辅助水下摄影测量设备对水下结构物的损伤进行修理和加固。 ' B. x6 D% v+ n, q" |* Z5 Y9 R0 U
⑹海底搜寻:利用重力仪、磁力仪、多波束、侧扫声呐等仪器对海底异常物体如失事飞机、沉船、鱼雷等展开搜寻。
8 e9 L% n5 C+ `. ` 
8 |% y: m6 G p" Z
来源:溪流 ! q& |% ~- T. b" z& u c2 o
本文系海洋大模型微信订阅号编辑转载,转载目的在于传递更多信息,并不构成任何投资及应用建议。投资者据此操作,风险自担。我们尊重原创者,版权归原作者和媒体所有,在此向原创者表示感谢。如涉及作品内容、版权和其它问题,请在30日内与平台联系,我们将在第一时间删除内容!本文章版权归原本作者,海洋大模型微信订阅号拥有对此声明的最终解释权。 h5 E. z0 n" e; U
. m& H& J, P% t, b& m* d
2 }8 n2 Q& K- `2 F a% g9 L" y$ k% v9 g7 I* Y3 d. j
, ~ R9 J: Z9 `1 v/ | N
| 

